

лекции / lekcii_kompyuternoe_upravlenie / КУ_Л_24
.DOCЛЕКЦИЯ № 24
СИНТЕЗ СПЕЦИАЛЬНЫХ КОРРЕКТИРУЮЩИХ УСТРОЙСТВ ДИСКРЕТНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ
План лекции:
-
Синтез дискретных систем методом стандартных разностных уравнений.
-
Постановка задачи синтеза.
-
Реализация аналогового прототипа.
24.1Синтез дискретных систем методом стандартных разностных уравнений.
Применение импульсной или цифровой коррекции позволяет решать более широкий круг задач, нежели обеспечение желаемого вида ЧХ ИС
С помощью цифровых фильтров можно придавать системе новые свойства:
-обеспечивать желаемые переходные процессы с заданным временем регулирования и перерегулированием ;
-получать переходной процесс конечной длительности (апериодический переходной процесс);
-осуществлять желаемое распределение корней характеристического многочлена системы и тд
Рассмотрим более подробно некоторые из этих вопросов и начнем с синтеза дискретных систем методом стандартных разностных уравнений
Изложим этот метод применительно к простейшей дискретной системе, структурная схема которой приведена на рис.24.1.











![]()
![]()
![]()
![]()






Рис.24.1.
Здесь
![]() и
и
![]() -
ПФ соответственно ОY
и цифрового фильтра
Будем считать эти передаточные функции
дробно-рациональными, те
-
ПФ соответственно ОY
и цифрового фильтра
Будем считать эти передаточные функции
дробно-рациональными, те
![]()
при
этом степени многочленов
![]() и
и![]() равны r
и n
соответственно
Тогда ПФ замкнутой системы будет иметь
вид:
равны r
и n
соответственно
Тогда ПФ замкнутой системы будет иметь
вид:
![]()
где
![]()
![]() -характеристический
многочлен замкнутой системы
-характеристический
многочлен замкнутой системы
Уравнение в изображениях:
![]() ,
(24.1)
,
(24.1)
где
![]() -
Z-преобразование
выходного, а
-
Z-преобразование
выходного, а
![]() -
входного сигналов:
-
входного сигналов:
![]() и
и
![]()
Свободное движение замкнутой системы при этом описывается уравнением:
![]() (24.2)
(24.2)
Переходя в (24.2) к оригиналам, получим:
![]() .
(24.3)
.
(24.3)
При
имеющихся начальных условиях
![]() , уравнение (24.3) однозначно определяет
свободное движение системы
, уравнение (24.3) однозначно определяет
свободное движение системы
Поставим задачу синтеза следующим образом:
-при известной структуре системы и заданной ПФ ОУ параметры цифрового фильтра должны быть выбраны таким образом, чтобы разностное уравнение свободного движения системы в точности соответствовало некоторому стандартному разностному уравнению
Стандартные разностные уравнения выбираются в зависимости от показателей качества системы Методика их выбора, в частности изложена в работах Я.З.Ципкина
Например, стандартное разностное уравнение второго порядка имеет вид:
![]() .
.
Коэффициенты
![]() и
и
![]() ,
соответствующие кратным корням Z
и различным временам регулирования,
приведены в таблице 24.1.
,
соответствующие кратным корням Z
и различным временам регулирования,
приведены в таблице 24.1.
Таблице 24.1.
|
|
|
|
Время регулирования |
|
06 |
12 |
036 |
8 тактов |
|
08 |
16
|
064 |
20 тактов |
По требуемому времени регулирования выбираются численные значения коэффициентов стандартного уравнения
Синтез корректирующего устройства проводится в следующей последовательности:
1Составляется характеристическое уравнение:
![]() ,
(24.4)
,
(24.4)
в нем полиномы A(z) и B(z) известны, а полиномы C(z) и E(z) нужно определить В общем случае имеем:
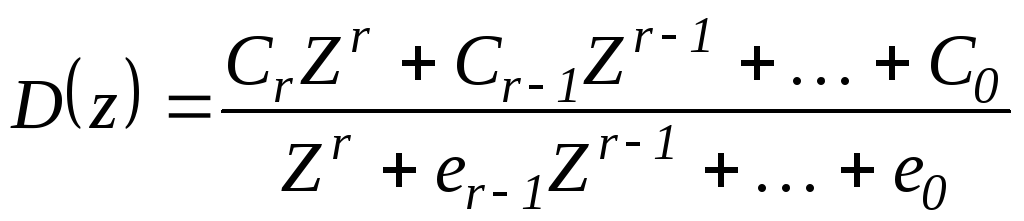
те
количество неизвестных коэффициентов
![]() равно:
равно:![]()
2Так как степень характеристического уравнения (24.2) равна n+r, то, исходя из требуемых показателей качества системы, выбираем стандартное разностное уравнение той же степени:
![]() .
.
3Характеристическое уравнение (24.5) приравнивается стандартному характеристическому уравнению, те
![]()
Далее,
сравнивая коэффициенты при одинаковых
степенях Z
получим систему n+r
уравнений относительно (2r+1)
неизвестных коэффициентов
![]()
Заметим, что число уравнения n+r
равно степени характеристического
многочлена (H(z)),
тк
этот многочлен приведенный, он имеет
единичный коэффициент при степени
Заметим, что число уравнения n+r
равно степени характеристического
многочлена (H(z)),
тк
этот многочлен приведенный, он имеет
единичный коэффициент при степени
![]()
Чтобы полученная система уравнений имела однозначное решение, необходимо, чтобы число неизвестных было равно числу уравнений, те:
![]()
откуда :
![]() .
.
Следовательно,
порядок ЦКУ должен быть равен n-1,
где n-порядок
ОУ
Решив полученную систему уравнений, мы
получим ПФ
![]() КУ
КУ
К достоинствам указанного метода синтеза можно отнести возможность учета отдельных показателей качества системы на начальном этапе синтеза Его недостатком является то, что при определении ПФ D(z) не учитываются ограничения, накладываемые на собственную динамику фильтра, например устойчивость цифровой алгоритмической коррекции Системы, синтезированные методом стандартных разностных уравнений, часто обладают большим перерегулированием при обработке ступенчатого входного воздействия
24.2 Реализация аналогового прототипа с помощью цифрового фильтра.
Цифровые фильтры могут использоваться не только для коррекции импульсных, но и непрерывных систем, если передаточная функция КУ оказывается слишком сложной
Кроме того, в силу чисто конструктивных и эксплуатационных преимуществ может оказаться оправданным перевод на цифровое управление уже имеющихся непрерывных систем И, наконец, возможен вариант, когда систему синтезируют как непрерывную, заранее зная, что КУ будет реализовываться в цифровой форме Такой подход объясняется тем, что аппарат теории синтеза непрерывных автоматических систем более развит, чем аппарат синтеза дискретных систем Следует правда отметить, что несмотря на это обстоятельство, указанный подход, в общем случае, мало перспективен, так как при этом заведомо нельзя получить лучшие результаты, чем в непрерывном варианте
Перед тем, как рассмотреть общую задачу дискретизации аналогового прототипа, рассмотрим предварительно вопрос о реализации интегрирующих цифровых фильтров
Уравнение непрерывного интегратора (рис.24.2) имеет вид:
![]() .
(24.5)
.
(24.5)
![]()


![]()
![]()
Рис.24.2.
Применяя для вычисления интеграла метод прямоугольников (рис.24.3), получим:








![]()
![]() (24.6)
(24.6)


![]()
![]()
Рис.24.3.
И тогда:
![]() .
.
Полученному разностному уравнению соответствует ПФ:
![]() (24.7)
(24.7)
![]() .
.
Применяя вместо формулы прямоугольников, формулу трапеций, получим:
![]() ,
,
что соответствует z- ПФ:
![]() (24.8)
(24.8)
Логарифмические частотные характеристики цифрового фильтра (24.8) представлены на рис.24.4 Откуда видно, что ЛАФЧХ непрерывного и дискретного КУ совпадают только в диапазоне низких частот









![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис.24.4.
Возможно использование и других, более точных формул интегрирования
Рассмотрим
теперь задачу реализации непрерывного
КУ, заданного своей ПФ
![]() :
:

с помощью цифрового фильтраОдин из способов ее решения состоит в аппроксимации непрерывного интегратора цифровым ПФ (24.6) или (24.7)
При этом исходная ПФ D(p) представляется в виде функций от отрицательных степеней p, те:
 .
.
Выбирая для аппроксимации интегратора формулу (24.5) получим следующее соответствие между l-кратным интегрированием с помощью непрерывных и цифровых устройств:
![]() (24.9)
(24.9)
Заменяя
в выражении для ПФ
![]() в соответствии с (24.9) получим ПФ цифрового
фильтра:
в соответствии с (24.9) получим ПФ цифрового
фильтра:
 .
.
Заметим, что соответствие между непрерывным и цифровым интегрированием может быть получена в форме, отличной от (24.9)По сути дела различные формы зависимости (24.5) соответствуют различным методам численного интегрирования
ПРИМЕР.
Рассмотрим пример перехода от аналогового прототипа к цифровому фильтру Пусть
![]()
эта ПФ соответствует часто применяемому интегро-дифференцирующему фильтруТогда:
![]() .
.
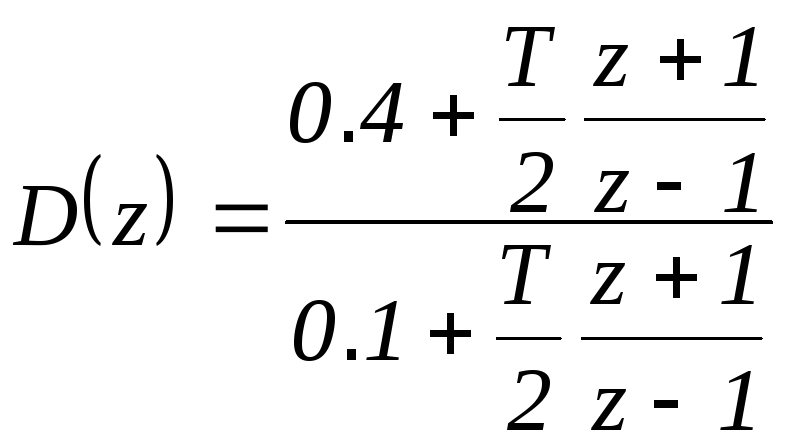 ,
,
или
![]() ,
,
где Т-период квантования
В заключение отметим, что кроме перечисленных методов существуют и другие многочисленные методы синтеза КУ