

лекции / lekcii_kompyuternoe_upravlenie / КУ_Л_17
.DOCЛЕКЦИЯ № 17
ВЫБОР ПЕРЕМЕННЫХ СОСТОЯНИЯ
ДИСКРЕТНОЙ СИСТЕМЫ
План лекции:
-
Способ прямого программирования.
-
Способ параллельного программирования.
-
Способ последовательного программирования.
Как уже отмечалось, выбор переменных состояния не является единственным и определяется выбором соответствующего базиса.
Рассмотрим выбор переменных состояния синхронных импульсных систем, заданных своими z- передаточными функциями.
Практически удобным приемом выбора переменных состояния является построение схем моделирования дискретной системы, которые включают в себя элементы задержки на такт и сумматоры. При этом за переменные состояния обычно принимают сигналы на выходах элементов задержки на такт.
Существуют три варианта перехода от z- ПФ дискретной системы к уравнениям (16.8) и (16.9).
Это способы прямого программирования, параллельного программирования и последовательного программирования. Рассмотрим все эти способы на пример звена второго порядка:
![]()
17.1.Способ прямого программирования.
Разделим
числитель и знаменатель
![]() на
на
![]() ,
получим:
,
получим:
![]() .
(17.1)
.
(17.1)
По определению ПФ:
![]() .
.
Введем новую
переменную
![]() :
:
![]()
![]()
![]() (17.2)
(17.2)
Учитывая теорему
о смещении аргумента решетчатой функции,
вспомним, что умножение изображения на
![]() соответствует смещению (задержке)
оригинала на 1 такт, на
соответствует смещению (задержке)
оригинала на 1 такт, на
![]() - на 2 такта.
- на 2 такта.
Тогда в соответствии с выражением (17.2) схему моделирования можно представить в следующем виде (рис.17.1).

Рис.17.1.
В соответствии с правилом, за переменные состояния выбираем выходы задержки на 1 такт.
Уравнение состояния системы можно получить, записывая связь между координатами на выходах элементов задержки. В итоге имеем:
 (17.3)
(17.3)
где
-
![]() - значения координат в последующем
времени.
- значения координат в последующем
времени.
Так как :
![]()
и при этом
то для выходной переменной получим уравнение:

![]()
![]() . (17.4)
. (17.4)
Таким образом, уравнение (16.8), (16.9) принимают вид (17.3), (17.4), а матрицы Ф, С, Н, R определяются выражениями:
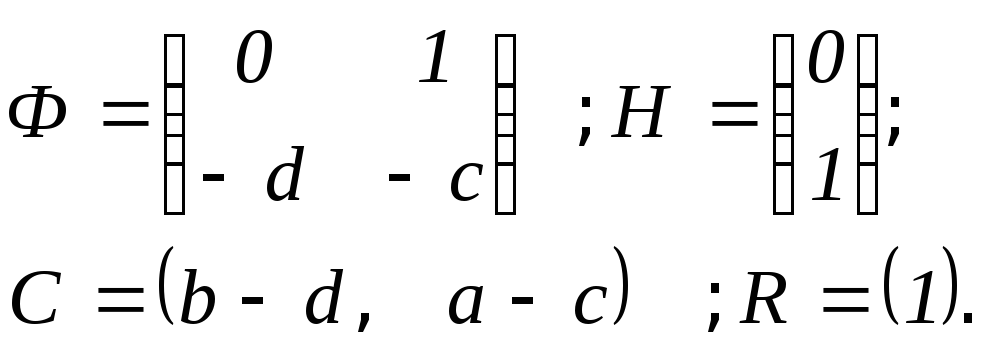
![]()
-
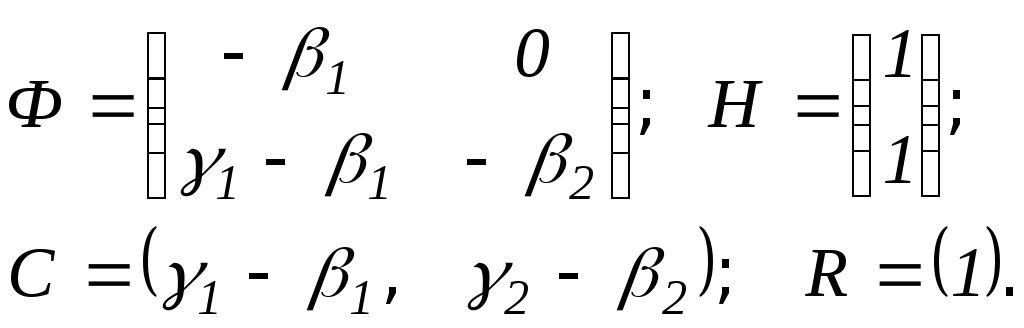
Способ параллельного программирования
Передаточная функция (17.1)
![]()
разбивается на сумму элементарных звеньев:
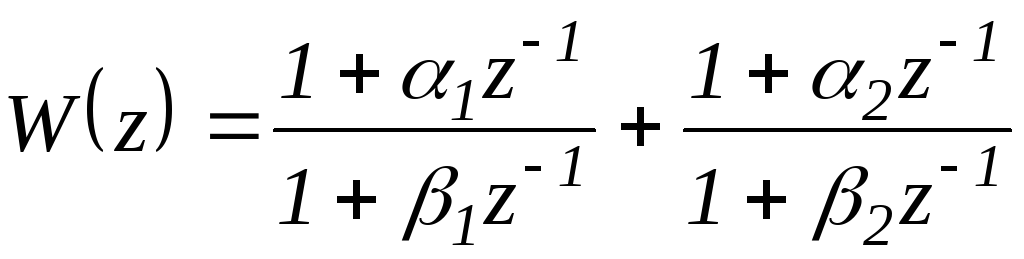 .
.
Далее, аналогично первому способу, вводят новые переменные:
![]()
Переменные состояния определяются выражением:
Соответствующая схема моделирования представлена на рис.17.2.:
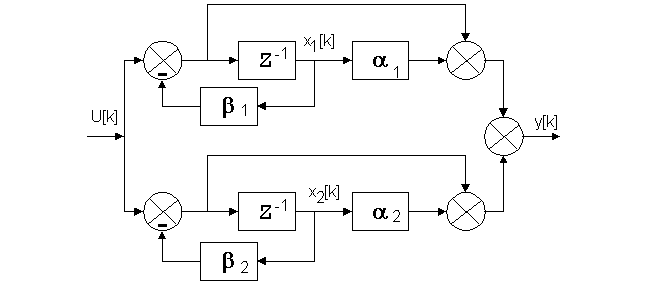
Рис.17.2.
Разностные уравнения системы будут иметь вид:
![]()
![]() .
.
При этом матрицы будут иметь вид:

Достоинство этого
способа состоит в том, что матрица Ф
получается диагональной, но при этом
числа
![]() могут оказаться комплексными.
могут оказаться комплексными.
17.3. Способ последовательного программирования
Общая его идея заключается в следующем:
уравнению системы в операторной форме записи придается вид:
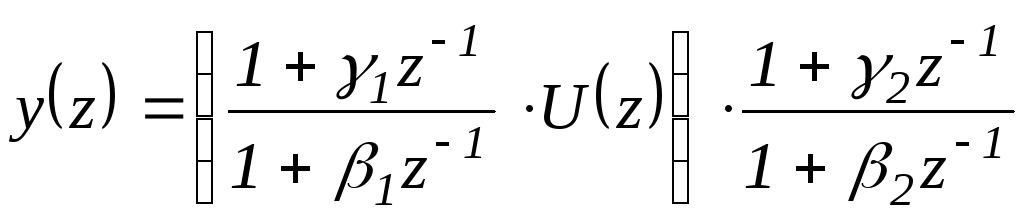
и схема моделирования составляется как последовательность однотипных каскадов (рис.17.3).
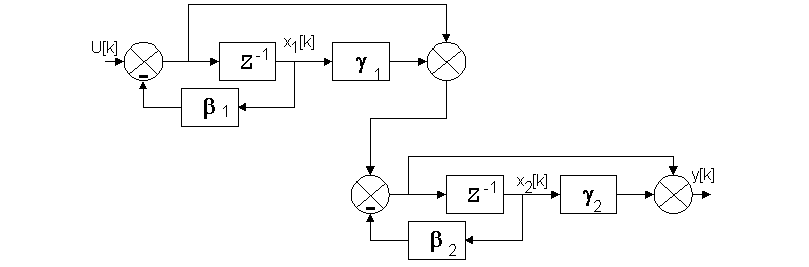
Рис.17.3.
Уравнения состояния системы при этом будут иметь вид:
![]()
![]() .
.
Матрицы Ф,С,Н,R будут определяться следующими выражениями:
Матрица Ф при этом является треугольной.
Составление блок–схемы моделирования дискретных систем является важным этапом их исследования. С помощью блок – схемы можно рационально выбрать переменные состояния системы, а также перейти к описанию динамики системы в рамках аппарата дискретного преобразования Лапласа или Z – преобразования.