

2. Основы математического аппарата и общие принципы построения импульсных систем. Восстановления сигналов по дискретным выборкам.
2.2. Восстановление сигнала по дискретным выборкам
2.2.1. Причины погрешностей восстановления сигнала
В большинстве дискретных или цифровых систем управления высшие гармоники в сигнале f*(t),которые возникают вследствие операции квантования по времени, должны быть отфильтрованы до того, как сигнал будет приложен к непрерывной части системы. Большинство систем управления содержит элементы, которые спроектированы в расчете на непрерывные входные сигналы, поэтому необходимо использовать сглаживание импульсных сигналов. В противном случае аналоговые элементы систем могут подвергаться чрезмерному износу. Для сопряжения цифровых и аналоговых элементов часто используют устройство восстановления данных, или, проще говоря, фильтр. Большинство промышленных устройств выборки и хранения выпускаются как единое изделие.
Для изучения процесса восстановления данных предположим, что идеальный квантователь имеет частоту ωs, которая по крайней мере в 2 раза больше максимальной частоты, содержащейся в непрерывном входном сигнале. На рис. 2.10 показан амплитудный спектр F*(s).
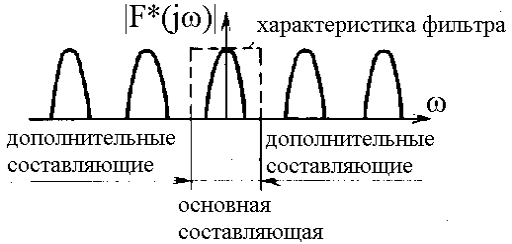
Рис. 2.10. Восстановление непрерывного сигнала по дискретным выборкам с использованием идеального низкочастотного фильтра
Из рисунка ясно, что для получения дубликата непрерывного сигнала квантованный по времени сигнал должен быть пропущен через идеальный низкочастотный фильтр с амплитудной характеристикой, показанной на рис. 2.11.
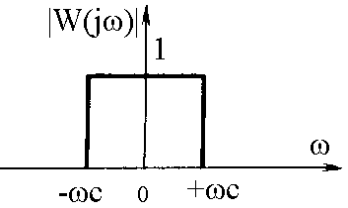
Рис. 2.11. Амплитудная характеристика идеального фильтра
К сожалению, идеальная характеристика фильтра физически нереализуема, так как хорошо известно, что в этом случае переходная функция должна начинаться до приложения входного сигнала. Однако даже если бы можно было реализовать идеальный фильтр, то, как упоминалось выше, точное воспроизведение непрерывного сигнала основано на предположении, что f(t) имеет ограниченный спектр. Поэтому во всех практических случаях невозможно точно восстановить непрерывный сигнал, если он квантован по времени. Самое лучшее, что можно сделать при восстановлении данных, это постараться как можно точнее аппроксимировать исходную функцию времени. Более того, как будет показано ниже, лучшая аппроксимация исходного сигнала требует в общем случае большей временной задержки, что нежелательно с точки зрения её неблагоприятного влияния на устойчивость системы.
2.2.2. Проблемы создания идеального фильтра
Идеальный низкочастотный фильтр должен обладать амплитудной характеристикой, показанной на рис. 2.11, для которой |W( ω)| = 1 в полосе пропускания фильтра (в полосе прозрачности) и |W( ω)| = 0 в остальной области частот (в полосе непрозрачности). Кроме того, принято считать, что фазовая характеристика идеального фильтраargW(ω) равна нулю или же пропорциональна частотеargW(ω) = - αω, α0. При этих условиях сигналf(t), спектр которого уже полосы пропускания фильтра, воспроизводится на выходе без изменения, за исключением просто задержки Т =/2.
Частотная характеристика реальных фильтров может лишь приближаться к характеристике идеального фильтра. Некоторые из этих отличий показаны на рис. 2.12. Во-первых АЧХ |W(ω)| реального физического фильтра не может скачком изменяться от 1 до 0 начастоте среза,это изменение происходит в некоторой переходной полосе, имеющей конечную величину. Во-вторых, АЧХ |W(ω)| не может быть в точности равна нулю на всех частотах полосы непрозрачности, возможно |W(ω)| = 0 лишь на некоторых изолированных частотах, таких как на рис. 2.12. Относительную эффективность фильтра в полосе непрозрачности обычно определяютуровнем затуханияна верхней границе этой полосы частот. И наконец, практически невозможно соблюсти условия |W(ω)| = 1 или агgW(ω) = - αω в полосе пропускания. Типично, что средний коэффициент усиления фильтра меньше единицы и описываетвносимые потери.Кроме того, параметры характеристики реального фильтра отклоняются от идеальных параметров характеристики, что приводит к амплитудным и фазовым искажениям передаваемого сигнала. Часто отклонения амплитудно-частотной характеристики имеют вид, показанный на рис. 2.12, и называютсяпульсациями.
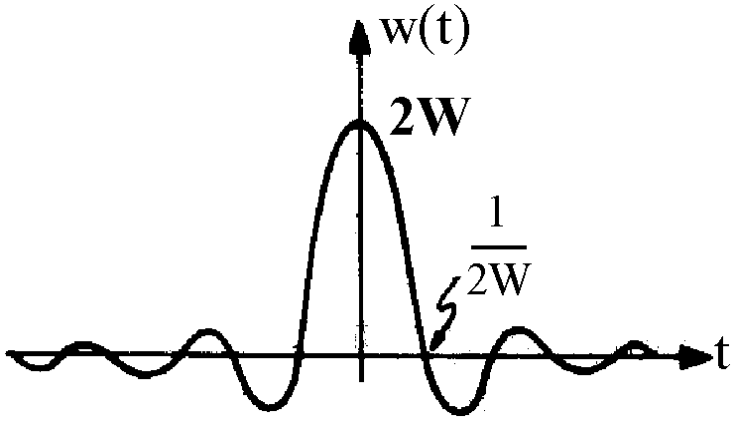
Импульсная характеристика (весовая функция) идеального фильтра нижних частот, имеющего амплитудно-частотную характеристику
|W(ω)| =1, | ω |<W,
|W(ω)| = 0, | ω|>W(2.8)
и фазочастотную характеристику argW(ω) = 0 определяется в соответствии со свойством преобразования Фурье как
![]() ,
-<t< +.
(2.9)
,
-<t< +.
(2.9)
На рис. 2.13 показана импульсная характеристика w(t) идеального фильтра. Посколькуw(t) не равна нулю приt<0, то идеальный фильтр нижних частот не является физически реализуемым устройством.
Проблема любого идеального фильтра состоит в том, что мы пытаемся обеспечить условие |W(ω)| =0 за пределами некоторой полосы частот, например | ω|>W.Норберт Винер сказал по этому поводу следующее: «Ни один из фильтров, отвечающих условию причинности, не может иметь бесконечного затухания в конечной (ненулевой) полосе частот. Идеальный фильтр физически неосуществим из-за самой его сущности, а не по причине отсутствия необходимых технических средств. Не существует такого прибора, который, действуя только в прошлом, смог бы с произвольной точностью отделить одну полосу частот от другой [полосы частот]»
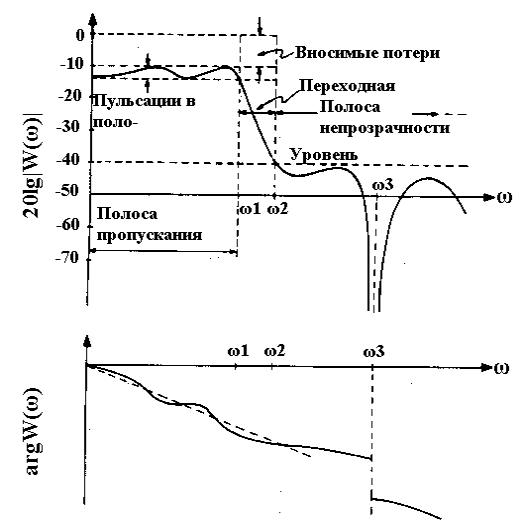
Рис. 2.12. Отклонения характеристик реальных фильтров от идеальных характеристик
|
Рис. 2.13. Импульсная характеристика идеального фильтра |
|
В теории сигналов и их обработки доказано, что нельзя физически осуществить фильтр, который бы полностью подавлял одну полосу частот и пропускал другую (изолированные нули амплитудной характеристики допустимы), безразлично, какова при этом форма амплитудно-частотной характеристики |W(ω)| в полосе пропускания и какова фазочастотная характеристика.