

1. Введение Цель курса «Цифровые системы автоматического управления»
В процессе проектирования системы автоматического управления решаются следующие основные задачи:
аппаратная реализация системы; на этом этапе проектирования выбирается соответствующий тип контроллеров, устройства ввода/вывода, устройства отображения параметров системы управления и ввода задающих сигналов; решаются вопросы электромагнитной совместимости оборудования системы управления;
разработка или выбор соответствующей операционной системы, разработка драйверов устройств, использование языков программирования;
разработка алгоритмов управления, обеспечивающих требуемые показатели точности, устойчивости, качества переходных процессов.
Целью данного курса является изучение методов анализа и синтеза цифровых систем автоматического управления, т.е. изучение вопросов, относящихся к третьей группе перечисленных выше задач.
1. Введение
1.1. Общие сведения
Дискретные и цифровые системы управления отличаются от непрерывных или аналоговых тем, что сигналы в одной или нескольких точках этих систем представляют собой последовательность импульсов или цифровой код. В литературе по управлению термины "импульсные системы", "дискретные системы", "системы с дискретным временем", "цифровые системы "используются довольно произвольно. Правильнее термин"импульсные"относить к системам с амплитудной модуляцией импульсов, при которой информационным параметром является амплитуда импульса, термин"цифровые"обычно относят к системам, в которых сигналы генерируются ЭВМ или цифровыми устройствами в виде кодов. Однако в реальных системах управления могут присутствовать как аналоговые и импульсные сигналы, так и цифровые коды.
Н а
рис. 1.1 показана типичная импульсная
система управления с обратной связью.
Квантователь представляет собой
устройство, выходной сигнал которого
имеет вид периодической или непериодической
последовательности импульсов, причем
между двумя соседними импульсами
информация отсутствует.
а
рис. 1.1 показана типичная импульсная
система управления с обратной связью.
Квантователь представляет собой
устройство, выходной сигнал которого
имеет вид периодической или непериодической
последовательности импульсов, причем
между двумя соседними импульсами
информация отсутствует.
Рис1.1. Импульсная система управления с обратной связью
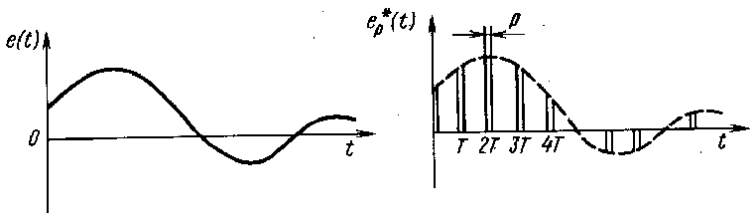
Рис. 1.2 иллюстрирует принцип работы квантователя. Непрерывный входной сигнал е(t) квантуется по времени, при этом выходной сигнал квантователя представляет собой последовательность импульсов. Предполагается, что в рассматриваемом случае частота квантования постоянна, а амплитуда импульса в момент замыкания определяется соответствующим значением входного сигналае(t). Существуют и другие способы квантования сигналов, например, квантование с циклически изменяющимся периодом, многократное, со случайным периодом, с широтно-импульсной модуляцией. На практике наиболее распространены квантование с постоянным периодом и многократное квантование. Расположенный между квантователем и управляемым процессом фильтр выполняет функцию сглаживания, так как большинство управляемых процессов рассчитано на прием аналоговых сигналов.
 а) б)
а) б)
Рис. 1.2. Непрерывный входной (а) и дискретный выходной (б) сигналы квантователя
В цифровой системе управления сигналы в одной или нескольких точках представляются цифровыми кодами, с которыми оперируют цифровая электронная вычислительная машина (ЭВМ) или цифровое устройство. Структура типичной цифровой системы управления показана на рис. 1.3. Наличие в некоторых точках системы сигналов в виде цифрового кода, например, двоичного, обусловливает использование цифроаналогового (цап) и аналогоцифрового (АЦП) преобразователей. Хотя между структурами и элементами импульсной и цифровой систем имеются существенные различия, математические описания этих систем достаточно близки, и они могут быть исследованы одинаковыми аналитическими методами.
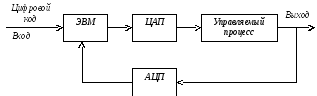
Рис. 1.3. Типичная цифровая система управления
В современных системах управления используются дискретные элементы и цифровые процессоры. Некоторые из преимуществ импульсных и цифровых систем заключаются в следующем: повышенная чувствительность, большая надежность, отсутствие дрейфа, более высокая устойчивость к шумам и возмущениям, меньшие габаритные размеры и масса, меньшая стоимость, удобства в программировании. Одним из существенных преимуществ цифровых контроллеров является их большая гибкость по сравнению с аналоговыми регуляторами. Программа цифрового регулятора может быть изменена в соответствии с требованиями проектировщиков или приспособлена к характеристикам объекта без каких-либо изменений в аппаратном обеспечении.