

7.2. Классификация адаптивных сау
По виду информации используемой в контуре адаптации адаптивные системы делятся на:
Адаптивные системы управления с разомкнутым контуром
Адаптивные системы с замкнутым контуром адаптации
Комбинированные системы управления
По критерию качества основного контура
Адаптивные системы со стабилизацией качества
Адаптивные системы с оптимизацией качества (настройка системы на определенный критерий), обеспечение экстремального значения критерия качества
По средствам, используемым для адаптации
СНС – самонастраивающиеся системы: в этих системах адаптация за счет изменения параметров регулятора
СОС – самоорганизующиеся системы: адаптация происходит за счет изменения структуры системы и изменения параметров
СОбС – самообучающиеся системы: в этих системах используется опыт работы системы, информация о котором сохраняется в специальном блоке
По характеру контура адаптации
Системы с постоянно работающим контуром: используются когда параметры объекта управления изменяются быстро и непрерывно
Системы с периодически работающим контуром: параметры изменяются медленно
Системы с однократно включающимся контуром адаптации: используется когда объект управления имеет неизвестные начальные характеристики и его параметры постоянно или мало меняются
По характеру пополнения информации в контуре адаптации
Адаптивные системы с пассивным накоплением информации: используется для получения информации из сигналов в режиме нормального функционирования (изменение внутренних координат в системе, формирование сигнала в контуре адаптации, режим нормального функционирования)
Адаптивные системы с активным накоплением информации: на выход САУ подаются специальные пробные (тестовые) сигналы, по реакции на которые получают информацию об объекте управления
8.1.Гармоничсекий коэффициент передачи нелинейного элемента
В основе метода гармонической линеаризации систем – линеаризация нелинейных элементов, входящих в систему управления.
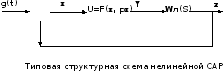
При гармонической линеаризации система управления приводится к следующему виду:
Допущения:
Линейная часть должна быть фильтром низких частот (то есть должна пропускать только низкие частоты)
Ошибка системы х должна быть близка по форме к гармоническому сигналу
Связь первых гармоник сигнала у и х характеризуется гармоническим коэффициентом линеаризации.
Допустим, на
вход нелинейного элемента поступает
синусоидальный сигнал
 .
Следовательно, выходной сигнал нелинейного
элемента
.
Следовательно, выходной сигнал нелинейного
элемента ,
является тоже периодическим, который
можно разложить в ряд Фурье . Этот ряд
содержит гармонические составляющие
с частотами, кратными частоте
,
является тоже периодическим, который
можно разложить в ряд Фурье . Этот ряд
содержит гармонические составляющие
с частотами, кратными частоте ,
, ,
… входного сигнала
,
… входного сигнала .
.
Так как линейная часть пропускает только основную первую гармонику сигнала y, то анализировать процессы в такой системе можно только по первой гармонике сигналов. Т. к.zиxблизки к гармоническому сигналу, сигналyможно определить после нахождения сигналаx, используя нелинейную характеристику НЭ.
Для получения коэффициентов гармонической линеаризации проводят линеаризацию нелинейных элементов.
 ,
, -
первые гармоники сигналаxиy, связанные гармоническим
коэффициентом передачи
-
первые гармоники сигналаxиy, связанные гармоническим
коэффициентом передачи ,
, -гармонический
коэффициент передачи (эквивалентный
комплексный коэффициент передачи)
-гармонический
коэффициент передачи (эквивалентный
комплексный коэффициент передачи)
Пусть



 (*)
(*)
Разложим функцию (*) в ряд Фурье:
 (**)
(**)

 ,
,

 Функции
от амплитуды и частоты
Функции
от амплитуды и частоты
Гармоническая линеаризация сводится
к отбрасыванию в выражении (**) всех
высших гармоник, находящимся под знаком
суммы, пусть

 ;
;
Заменим
 ;
; ;
где
;
где

 ,
, -
коэффициенты гармонической линеаризации
-
коэффициенты гармонической линеаризации
Пусть



 - эквивалентный комплексный коэффициент
- эквивалентный комплексный коэффициент