

6.1. Особые линии фазовых портретов нелинейных систем
Фазовые портреты (ФП) имеют особые линии - замкнутые фазовые траектории(ФТ). Такие линии отражают периодическое движение в системе и называются предельными циклами.
Различают: (круг – предельный цикл)
|
|
3. Полуустойчивые ПЦ |
|
|
|
|
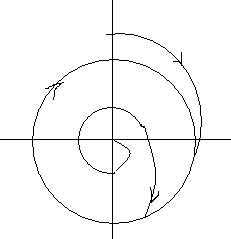

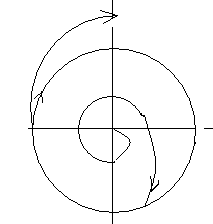

Устойчивый ПЦ соответствует автоколебаниям в САУ (незатухающим периодическим колебания)
Сепаратриссы- линии, разделяющие фазовую плоскость на подобласти с различным характером движения системы
Движение не по сепаратриссам , а вокруг
них.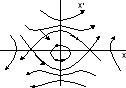
Зоны застоя– они характеризуют возможный диапазон, куда попадает координата системы в установившемся режиме.
Такие зоны застоя имеются у систем с
нечувствительностью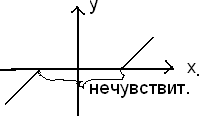 и сухим трением
и сухим трением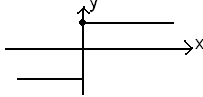 .
.
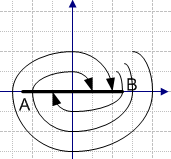 АВ
- зона застоя.
АВ
- зона застоя.
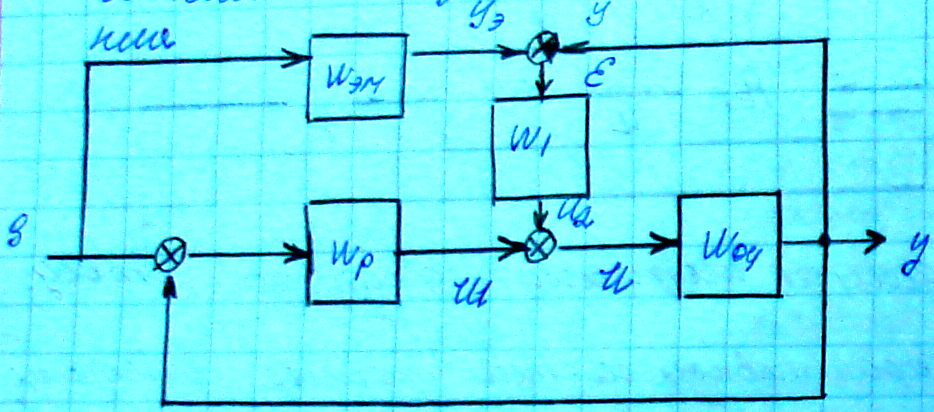
6.2. Адаптивные системы с сигнальной самонастройкой
Рассмотрим адаптивную систему с эталонной моделью и параметрической самонастройкой.
Самонастройка системы без изменения параметров регулятора –сигнальная самонастройка. Она заключается в формировании специального добавочного сигнала и подачи его на вход объекта управления.

Пусть


При изменении параметров объекта в замкнутой системе динамические процессы по управлению будут стабилизированы и соответствовать эталонной системе
Достоинства: простота реализации контура адаптации, так как нет необходимости формировать алгоритмы настройки параметров регулятора
Недостаток:
возможность потери устойчивости системы
вследствие очень большого коэффициента
усиления
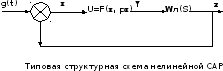
7.1. Основные положения метода гармонической линеаризации
В основе метода гармонической линеаризации систем – линеаризация нелинейных элементов, входящих в систему управления.
Метод применяется для анализа колебательных переходных процессов, когда на входе нелинейного элемента присутствует гармонический сигнал.
При гармонической линеаризации система управления приводится к следующему виду:
Допущения:
Линейная часть должна быть фильтром низких частот (то есть должна пропускать только низкие частоты)
Ошибка системы х должна быть близка по форме к гармоническому сигналу
Допустим, на вход нелинейного элемента
поступает синусоидальный сигнал
 .
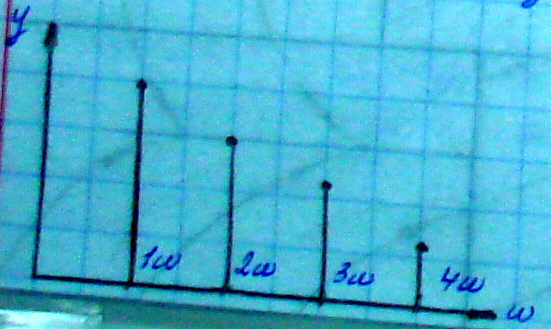
Следовательно, выходной сигнал нелинейного
элемента
.
Следовательно, выходной сигнал нелинейного
элемента ,
является тоже периодическим, который
можно разложить в ряд Фурье . Этот ряд
содержит гармонические составляющие
с частотами, кратными частоте
,
является тоже периодическим, который
можно разложить в ряд Фурье . Этот ряд
содержит гармонические составляющие
с частотами, кратными частоте ,
, ,
… входного сигнала
,
… входного сигнала .
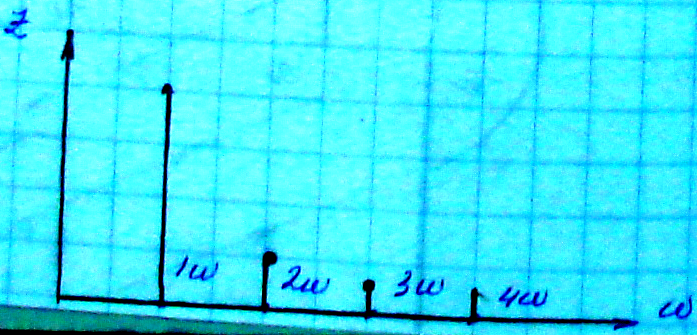
Полагая, что этот сигнал, проходя через
линейную часть, фильтруется до такой
степени, что высшими гармониками можно
пренебречь, запишем уравнение гармонической
линеаризации нелинейного элемента:
.
Полагая, что этот сигнал, проходя через
линейную часть, фильтруется до такой
степени, что высшими гармониками можно
пренебречь, запишем уравнение гармонической
линеаризации нелинейного элемента:

где
 ;
; ,
, – коэффициенты гармонической линеаризации
нелинейного элемента равны, соответственно:
– коэффициенты гармонической линеаризации
нелинейного элемента равны, соответственно:
 ;
;
 .
.
Уравнение (1) является уравнением гармонической линеаризации с точностью до высших гармоник для случая, когда нелинейный элемент имеет неоднозначную характеристику. Для случая, когда Н.Э. имеет однозначную характеристику уравнение (1) примет вид:
 .
.