

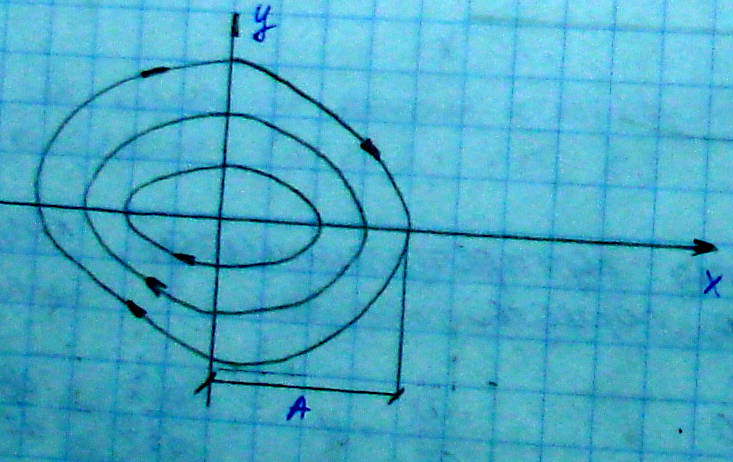
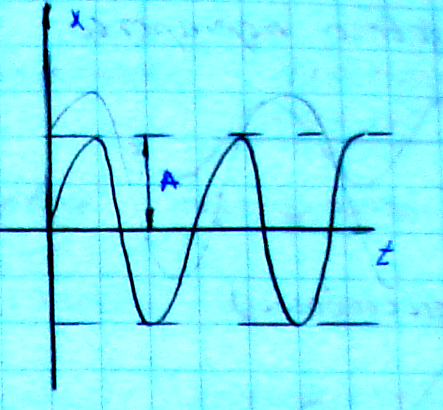
4.1. Фазовый потрет линейной консервативной системы

Избавимся от времени

Уравнение эллипса:

4.2. Адаптивные системы с эталонной моделью
К классу адаптивных систем прямого действия относятся адаптивные системы с эталонной моделью
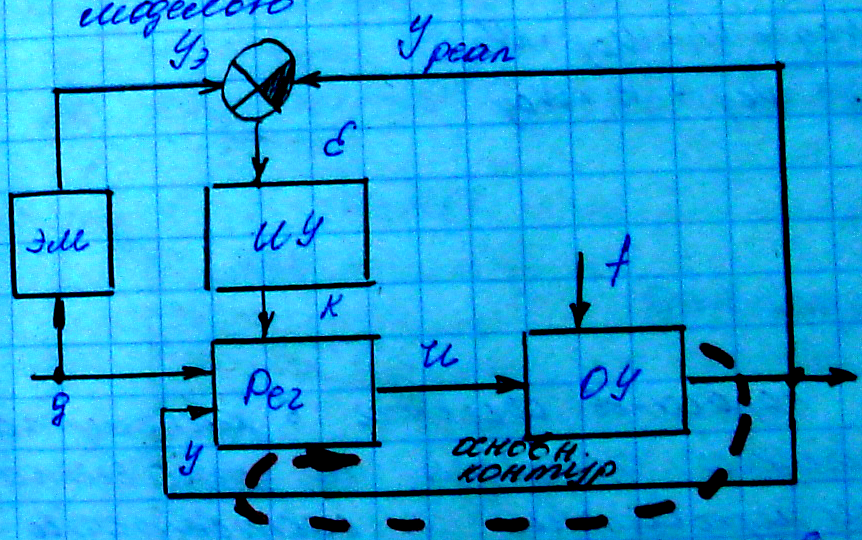
ЭМ – эталонная модель

Задача
адаптивных систем

Эталонная модель по своим динамическим характеристикам является эталоном для основного контура системы.
Цель самонастройки системы: сведение к нулю ошибки адаптации.
Главное достоинство адаптивных систем с эталонной моделью:
простота реализации
быстрота действия
5.1. Особые точки фазовых портретов линейной системы второго порядка
Характеристическое уравнение


5.2. Принципы построения контура адаптации
Два принципа:
Идентификационный
Безидентификационный
Два типа адаптивных систем:
Адаптивная система с идентификатором
Адаптивная система прямого действия
Адаптивные системы с идентификатором:
Идентификация объекта управления– построение его математической модели по наблюдаемым входным и выходным сигналам
Идентификатор– устройство, определяющее по входным и выходным сигналам модель объекта управления
 - вектор изменяющихся параметров объекта
управления
- вектор изменяющихся параметров объекта
управления
 - оценка (векторов) парметров
- оценка (векторов) парметров
ВУ – вычислительное устройство
 - настройка регулятора
- настройка регулятора
 - идентификатор
- идентификатор
 - внешнее возмущение
- внешнее возмущение
Контур адаптации включает два блока: И и ВУ.
И – определяет текущие оценки параметров объекта управления
ВУ – по этим
оценкам рассчитывает необходимые
настройки
 регулятора, при которых обеспечивается
требуемое качество работы основного
контура системы
регулятора, при которых обеспечивается
требуемое качество работы основного
контура системы
Трудности использования принципа идентификации:
Требуется значительное время для расчета оценок изменяющихся параметров объекта управления
сложность алгоритма работы в режиме реального времени
Адаптивные системы прямого действия (без идентификатора):
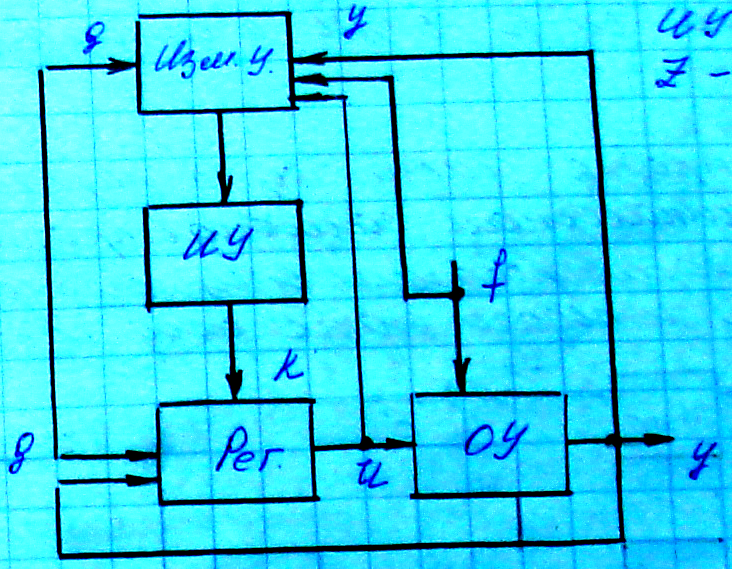
Изм. У. – измерительное устройство
ИУ – исполнительное устройство
Z– критерий качества
К классу адаптивных систем прямого действия относятся адаптивные системы с эталонной моделью
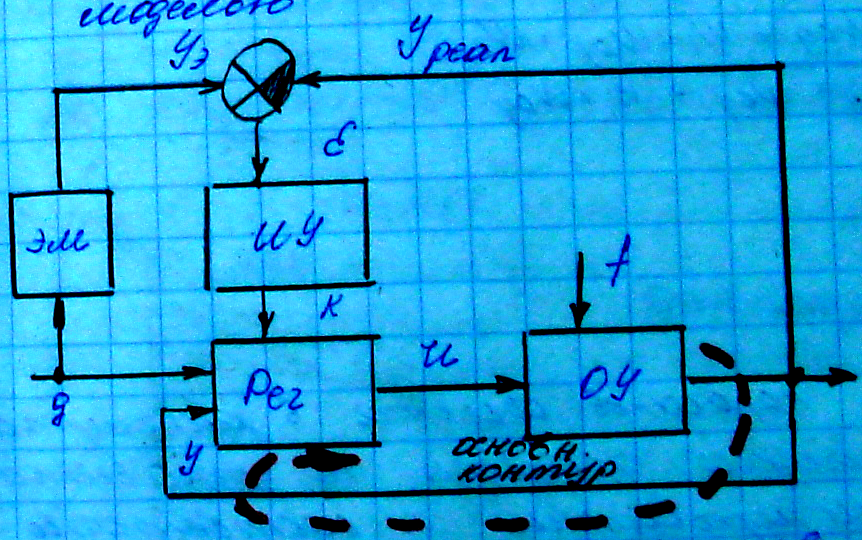
ЭМ – эталонная модель

Задача
адаптивных систем

Эталонная модель по своим динамическим характеристикам является эталоном для основного контура системы.
Цель самонастройки системы: сведение к нулю ошибки адаптации.
Главное достоинство адаптивных систем с эталонной моделью:
простота реализации
быстрота действия
Рассмотрим адаптивную систему с эталонной моделью и параметрической самонастройкой.
Самонастройка системы без изменения параметров регулятора –сигнальная самонастройка. Она заключается в формировании специального добавочного сигнала и подачи его на вход объекта управления.
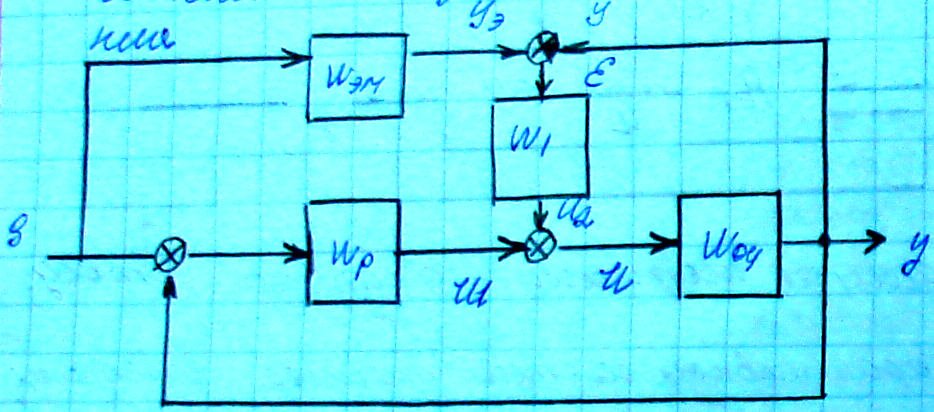

Пусть


При изменении параметров объекта в замкнутой системе динамические процессы по управлению будут стабилизированы и соответствовать эталонной системе
Достоинства: простота реализации контура адаптации, так как нет необходимости формировать алгоритмы настройки параметров регулятора
Недостаток:
возможность потери устойчивости системы
вследствие очень большого коэффициента
усиления