

Эквивалентные преобразования нелинейных элементов
В структурных схемах нелинейный элементпредставляют в видепрямоугольника с внесением в него либо статической характеристики, либо функциональной зависимости выходной величины у от входной величины х. Для однозначной нелинейной -y=F(x) Для неоднозначных нелинейностей у – зависит не только от величины входного сигналаx, но и от направления (т.е. производной)y=F(x,pх) .
Преобразование нелинейных САУ имеют свои особенности. Они обусловлены тем, что для них не выполняется принцип суперпозиции и правило коммутативности, т.е.

Не все правила структурных преобразования выполняются для нелинейных САУ, например:
сумматор нельзя переносить через нелинейное звено;
нельзя менять местами линейное и нелинейное звенья и др.
Преобразование НСАУ заключается в преобразовании линейных звеньев, стоящих с одной стороны и с другой от нелинейного элемента.
Пусть нам даны статические характеристики НЭ, необходимо найти эквивалентную характеристику.
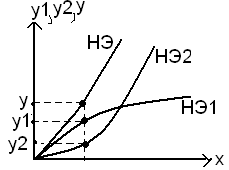
Складываем статические характеристики НЭ1 и НЭ2
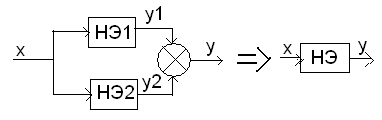
Последовательное соединение
![]()
Обратная связь

Принцип действия самоорганизующейся системы
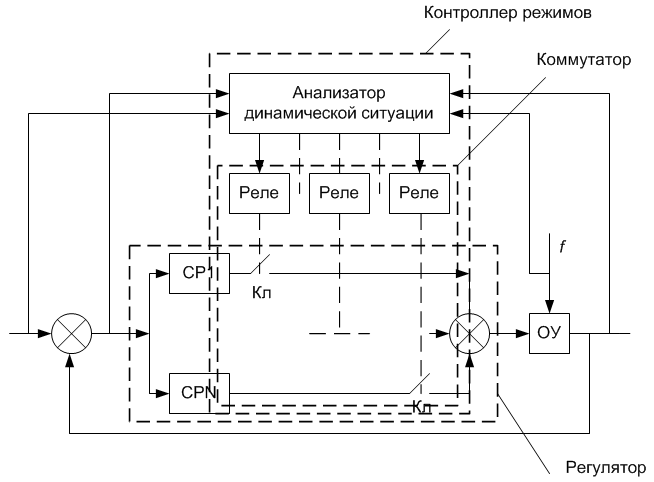
Анализатор динамической ситуации в системе в зависимости от динамической ситуации в системе формирует сигналы переключения, изменяющие структуру регулятора (подключает и отключает субрегуляторы (СР), настроенные на определенный режим работы системы)
Релейные элементы и их ключи образуют коммутатор.
Признаками самоорганизующейся системы являются:
Анализатор динамической ситуации
Коммутатор
Субрегуляторы
Коммутатор+анализатор динамичсекой ситуации=контроллер режимов
Пример самоорганизующейся системы:
 - скорость вращения двигателя
- скорость вращения двигателя
 - напряжение на якоре
- напряжение на якоре

Двигатель начинает вращаться не сразу из-за наличия в системе сухого трения.
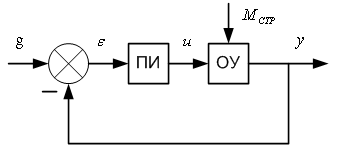
Необходимо сформировать дополнительный сигнал, который сдернет систему от сухого трения и позволит скомпенсировать запаздывание трогания двигателя.

 - дополнительный интегратор с малой
постоянной времени
- дополнительный интегратор с малой
постоянной времени
ТГ – тахогенератор
КОМП – компаратор – сравнивающий элемент
Если
 срабатывает реле 2
срабатывает реле 2
Если
 ,
то срабатывает реле 1 от напряжения
тахогенератора
,
то срабатывает реле 1 от напряжения
тахогенератора
Компаратор+тахогенератор=анализатор
Реле1 (кл1, кл2, кл3)+реле2 (кл4, кл5)=коммутатор
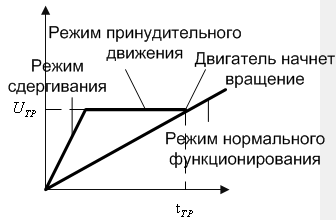
До появления
сигнала с тахогенератора идет накопление
напряжения на выходе интегратора
 .
Как только система начнет движение,
отключается верхний интегратор и с
выхода второго интегратора напряжение
(запомненное) подается на вход объекта.
.
Как только система начнет движение,
отключается верхний интегратор и с
выхода второго интегратора напряжение
(запомненное) подается на вход объекта.
Как только напряжение с выхода ПИ-регулятора превысит напряжение трогания, компаратор выдаст сигнал на реле2, которое отключит запоминающий интегратор и подключит ПИ-регулятор. После этого система войдет в свой нормальный режим функционирования до следующей остановки двигателя.
2.1. Типовые нелинейные характеристики
Неаппроксимированные:
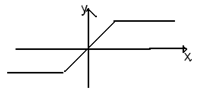
1.Элемент типа «насыщение»:

К ним относятся:
*Измерительные элементы
*Усилительные элементы
*Преобразовательные
*Исполнительные
Такая нелинейность обусловлена ограниченной мощностью элементов.
|
|
|
|
|

Аппроксимированные:
1.Элемент типа «насыщение»:
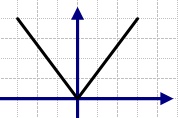
2. Выпрямитель
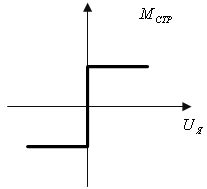
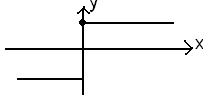
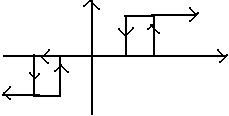
Реле
А) двухпозиционное
Б) трехпозиционное
В) двухпозиционное с гистерезисом
Г) трехпозиционное с гистерезисом


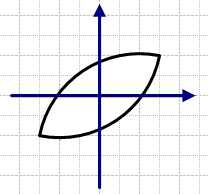
Петля гистерезиса (Характеристика типа люфт)
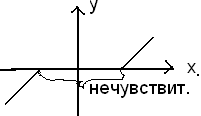
Типа «Зона нечувствительности
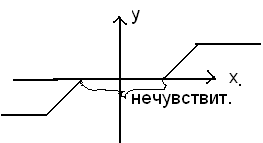
С зоной нечувствительности и насыщением
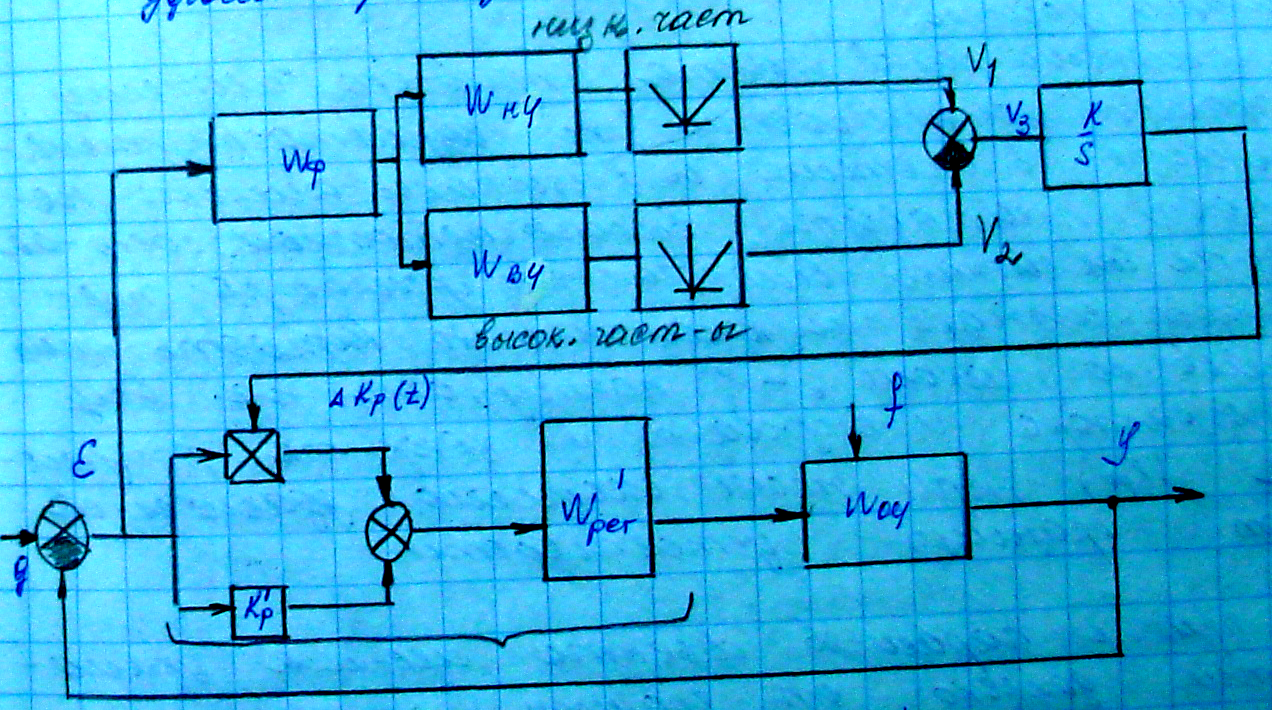
2.2. Самонастраивающиеся системы со стабилизацией частотных характеристик
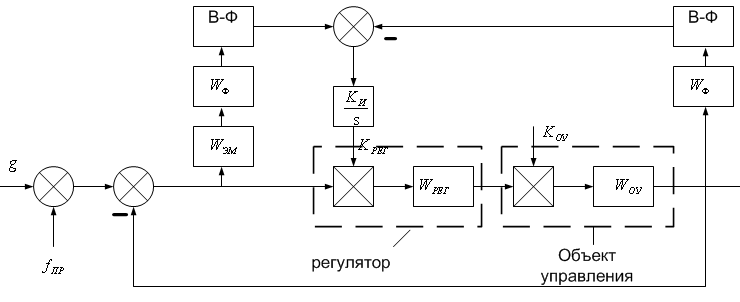
 - эталонная модель разомкнутой САУ
- эталонная модель разомкнутой САУ
 - режекторный фильтр
- режекторный фильтр
В-Ф – выпрямитель, который из синусоидального сигнала делает постоянный сигнал




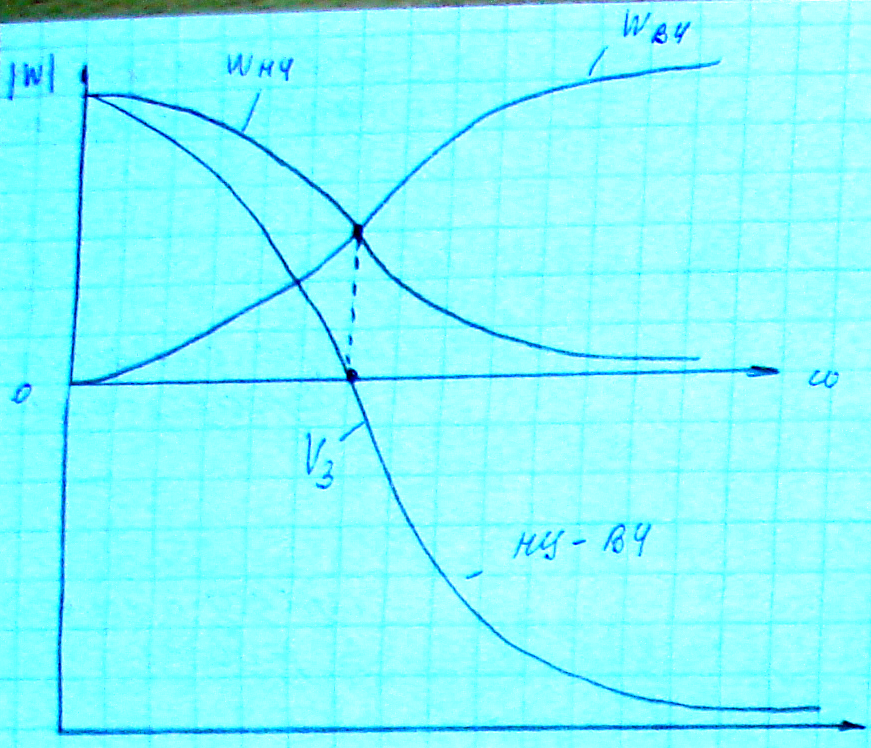
Стабилизацию частотных характеристик
легче выполнить путем стабилизации
АЧХ, так как она легче измеряется. Для
стабилизации АЧХ на частоте
 (стабилизация
одной точки частотной характеристики)
необходимо подать на вход системы
специальный сформированный сигнал.
(стабилизация
одной точки частотной характеристики)
необходимо подать на вход системы
специальный сформированный сигнал.

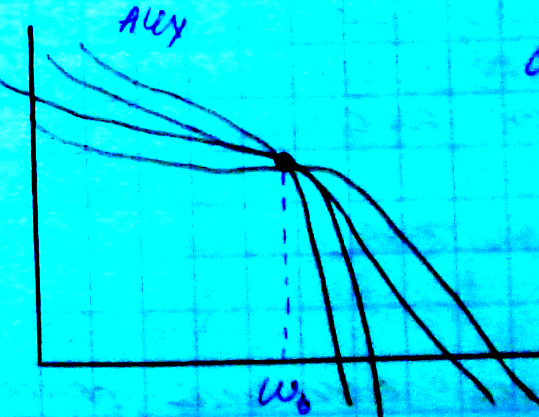
Условие:
 на
на
Характеристики, проходящие через точку
 называют эталонными.
называют эталонными.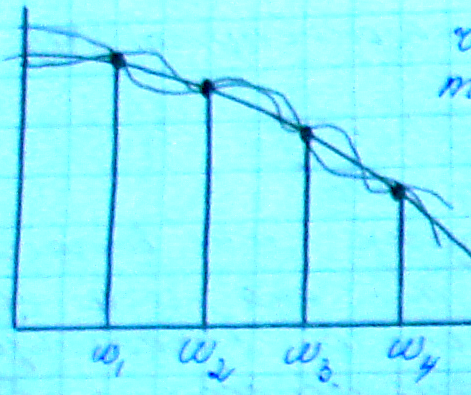
Чем больше точек стабилизации, тем ближе реальная система к эталонной.
Реализация адаптивной системы с
самонастройкой на
 частот
требует наличие соответственно
частот
требует наличие соответственно каналов самонастройки, что значительно
усложняет систему.
каналов самонастройки, что значительно
усложняет систему.
3.1. Фазовая плоскость. Фазовая траектория. Фазовый портрет.
Фазовое пространство–
пространство состояний вектора автономной системы, гдеn– порядок уравнения этой системы.
автономной системы, гдеn– порядок уравнения этой системы.
В частном случае при n=2 двумерное фазовое пространство представляет собой фазовую плоскостью.
Фазовая плоскостьобразуется
фазовыми координатами (x,y)
Под фазовыми координатамисистемы понимают обобщенные координаты системы, являющиеся ее внутренними координатами и их производными.
x-выходная координата, -её
производная.
-её
производная.
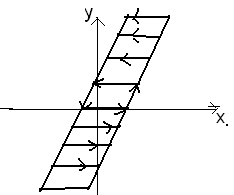
Фазовая траектория– линия на фазовой плоскости, которая показывает движение системы.
Фазовый портрет– совокупность фазовых траекторий.
Точка, изображающая в фазовом пространстве
состояние системы в некоторый момент
времени, называется изображающей.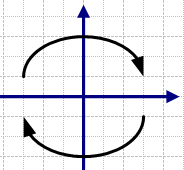
Свойство фазового портрета: так как
при значение
значение только возрастает, то в верхней фазовой
полуплоскости изображающая точка
движется только слева направо, а в нижней
полуплоскости где
только возрастает, то в верхней фазовой
полуплоскости изображающая точка
движется только слева направо, а в нижней
полуплоскости где изображающая точка движется справа
налево.
изображающая точка движется справа
налево.
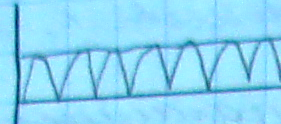
Самонастраивающиеся системы со сравнением высокочастотной и низкочастотной составлющих сигнала

высокочастотная
составляющая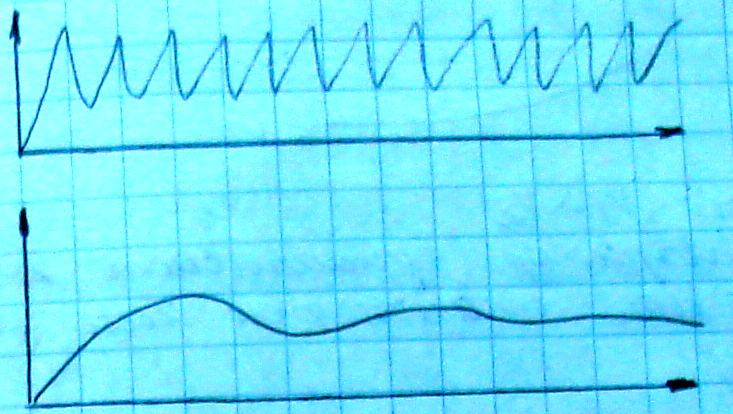
Низкочастотная составляющая
При слишком высокочастотной составляющей возможен переход в неустойчивый режим
Слишком низкочастотный сигнал затягивает переходный процесс
Увеличивает время регулирования. Желательно иметь колебательный переходный процесс, удовлетворяющий требованию по быстродействию


Низкие
частоты:

 ,
интегратор увеличивает коэффициент
передачи. Система становится более
чувствительной.
,
интегратор увеличивает коэффициент
передачи. Система становится более
чувствительной.
Низкие
частоты:

 ,
интегратор уменьшает коэффициент
передачи.
,
интегратор уменьшает коэффициент
передачи.
Принцип работы: Если изменение параметров объекта приближает систему к границе устойчивости, то возрастает колебательность в системе и в сигнале ошибки начинает преобладать высокочастотная составляющая. В результате выходной сигнал высокочастотного фильтра превышает сигнал низкочастотного. Разность этих сигналов со знаком минус поступает на вход интегратора и вызывает понижение коэффициента регулятора, при этом система удаляется от границы устойчивости.
Если при изменении параметров объекта
система удаляется далеко от границы
устойчивости, то процессы в ней становятся
очень медленными, при этом начинает
преобладать низкочастотная составляющая
ошибки системы. Разностный сигнал
 в этом случае оказался положительным
и увеличивает коэффициент
в этом случае оказался положительным
и увеличивает коэффициент .
.
При некотором значении коэффициента
передачи системы высокочастотная и
низкочастотная составляющая сигнала
становятся равными и сигнал
 ,
таким образом при этом в основном контуре
поддерживается определенный желаемый
запас устойчивости.
,
таким образом при этом в основном контуре
поддерживается определенный желаемый
запас устойчивости.