

Понятия адаптивного управления
Классификация оптимальных и адаптивных систем
Принципы построения экстремальных систем
Примеры задач экстремального управления
Понятие об экстремальном управлении
Самонастраивающиеся системы
Принципы построения самонастраивающтхся систем
Основные элементы систем
Классификация и особености самонастраивающихся систем
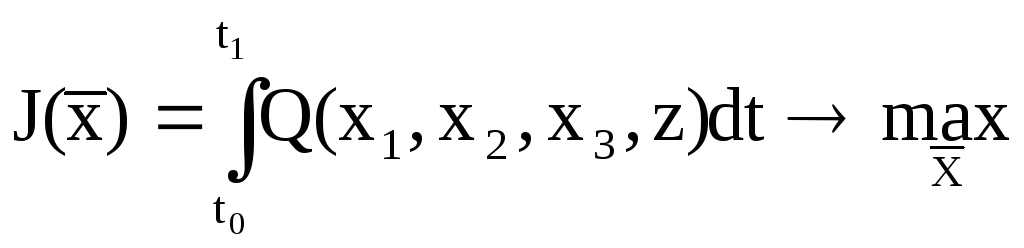
Адаптация – это оптимизация в условиях недостаточной априорной информации об объекте управления. Если в задаче оптимального управления объект описывался уравнением
![]() ,
,
в котором функция φ была достаточно
хорошо известна, то в задаче адаптивного
уравления объект будет описываться
уравнением
![]() ,
где α – параметр неопределенности.
,
где α – параметр неопределенности.
Природа неопределенных параметров может быть различной:
а) неточное знание математической модели объекта;
б) неточная информация о программном движении, например, в случае, когда моменты перехода с одного режима работы объекта на другой неизвестны;
в) разброс параметров в пределах технологических допусков;
г) “старение”элементов объекта и т.п.
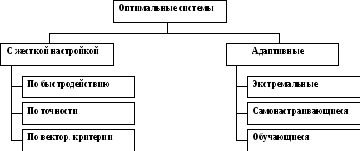
Для того, чтобы отразить отношение оптимальных и адптивных систем друг к другу, все оптимальные системы делят на два класса:
1) с жесткой настройкой (без адаптации); 2)адаптивные.
Оптимальные системы с жесткой настройкой разделяют на подклассы в зависимости от выбранного критерия оптимальности:
по быстродействию (критерий минимума времени перех. процесса);
по точности (критерий minошибки системы);
комбинированные (векторный критерий);
др.
Оптимальлные адаптивные системы разделяют на подклассы в зависимости от способа адаптации:
экстремальные системы, в которых обеспечивается оптимальный режим, соответствующий экстремуму статической характеристики объекта при её дрейфе, за счет автоматического регулирования сигналов на входе экстремального объекта;
самонастраивающиеся системы, в которых осуществляется адаптация в условиях неопределенности, обеспечивающая заданный оптимальный режим за счет изменения параметров или структуры системы;
обучающиеся системы, в которых используется адаптация, обеспечивающая заданный оптимальный режим в результате постепенного накапливания, запоминания и анализа информации о поведении системы и изменении законов функционироания в зависимости от приобретенного опыта.
2. Принципы построения экстремальных систем
2.1. Примеры задач экстремального управления
Экстремальные системы – основные и наиболее распространенные типы оптимальных систем, в которых оптимизируемый объект имеет экстремальную статическую характеристику, а автоматическое устройство (оптимизатор) обеспечивает работу объекта в экстремальном режиме.
Экстремальные системы целесообразно применять в следующих случаях:
если существует показатель качества, с изменением которого происходит достаточно ощутимое изменение технико-экономической эффективности функционирования обьекта управления;
если существуют возможности определения экстремума фнкционала качества и воздействия на регулирующие органы объекта с целью получения экстремального режима работы.
Пример задачи экстремального управления (э.у.)
В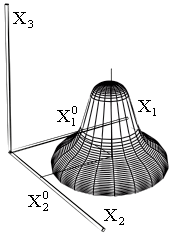 радиолокационных системах слежения
(сс) за движущимися объектами, управляющими
координатамиx1
и x2 для антены явл-ся
соответственно углы места и азимута, а
управляемой переменной Jявляется
интенсивность принимаемого радиолокационного
сигнала. При движении цели значение
координатx1
и x2 меняются.
Зависимость J(x1,x2)
будет нелинейной и имеетmax.
радиолокационных системах слежения
(сс) за движущимися объектами, управляющими
координатамиx1
и x2 для антены явл-ся
соответственно углы места и азимута, а
управляемой переменной Jявляется
интенсивность принимаемого радиолокационного
сигнала. При движении цели значение
координатx1
и x2 меняются.
Зависимость J(x1,x2)
будет нелинейной и имеетmax.
Значение переменной Jзависит от расстоянияx3и наличия помехx, принимаемых антенной. В данном случае необходимо применить экстремальное управление, обеспечивающееmax Jпосредством
изменения управляющих координат при движении цели, изменении расстояния и наличия помех
имеются и другие технические устройства с экстремальными статическими характеристиками.
электрический резонансный контур

сельсины, напряжение выхода которых имеет экстремальную зависимость от угла поворота ротора
линия электропередачи, имеющая экстремальную зависимость мощности от сопротивления нагрузки и линии передачи.
Т.о. в качестве критерия оптимальности в экстремальных системах могут быть самые различные физические и технико-экономические показатели (напряжение, температура, производительность, к.п.д., расход электроэнергии и т.д.). Значения параметров системы, обеспечивающих экстремальный режим, называются экстремальными.