

3.3. Классификация и особенности самонастраивающихся систем
СС можно классифицировать по различным признакам. Например, по
сигналам внешних воздействий;
динамическим характеристикам объектов,
сигналам внешних воздействий и динамическим характеристикам (комбинированные).
Дополнительным признаком классификации можно считать способ воздействия элементов самонастройки на систему:
с автоматической настройкой параметров (собственно самонастраивающиеся системы),
с автоматической настройкой структуры (самоорганизующиеся системы).
СС разделяют на разомкнутые и замкнутые относительно контура настройки и входа системы, с активной и пассивной самонастройкой и т.д.
СС не требует полной информации обо всех данных системы и при изменении внешних условий автоматически настраивается, обеспечивая заданный критерий качества. Для обнаружения отклонений параметров объекта от оптимальных в СС используются различные средства, например, организация автоматических пробных движений системы с последующим анализом исходной и вырабатываемой информации. По существу это автоматический поиск, являющийся наиболее характерным признаком СС. В качестве пробных движений в ряде случаев используют имеющиеся в системе флуктуации.
СС является прежде всего динамическими устойчивыми системами,работающими по принципу отклонения регулируемой переменной или с использованием комбинированного принципа регулирования.
Отметим некоторые характерные особенности СС:
наличие не менее 2–х контуров – основного и самонастройки;
наличие элементов с изменяемыми (непрерывно или дискретно) параметрами, характеристиками (или структурой) и переменным в процессе работы алгоритмом;
наличие вычислительных устройств (или ЭВМ);
повышенную чувствительность к изменению параметров системы и входрых cигналов;
использование случайных сигналов (помех) для осуществления автоматического поиска.
В зависимости от структуры контура самонастройки различают следующие самонастраивающиеся системы.
Системы с замкнутым контуром самонастройки.

Самонастройка поизводится по какому–либо показателю качества поцесса управления x(t).
Система с разомкнутым контуром самонастройки.
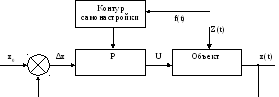
Контур самонастройки будет разомкнут. Если он реагирует на косвенные величины f(t), от которых зависят параметры объекта (например, скоростной напор в ЛА).
Разомкнутый контур, не реагирующий на результат самонастройки.

Самонастройка осуществляется по свойствам внешних воздействий задающего x0и возмущающегоZ(t).
Процесс самонастройки системы состоит из следующих этапов:
а) определение (измерение) исходных параметров x, ƒ, z;
б) идентификация (корректировка модели);
в) формирование воздействия на настраиваемую часть системы управления;
г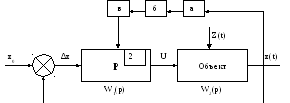 )
изменение параметра или структуры
регулятора.
)
изменение параметра или структуры
регулятора.
Передаточная функция адаптивной системы, отражающая функционирование контура самонастройки, равна
![]()
Для неизменности We(p) требуется сохранять
![]()
![]()
т.е передаточная функция управляющей части системы должна самонастраиваться в соответствии с этой формулой при изменении функции W2(p).