

2.2. Понятие об экстремальном управлении
Цель э.у. состоит в обеспечении оптимального
статического режима работы объекта.
Основной задачей при этом является
получение minилиmax
Jпри недостаточной информации о
характеристиках и условиях работы
объекта. За исходную информацию
принимается тот факт, чтоJимеет экстремальную зависимость от
![]() .
При этом неизвестно ни количество
экстремумов, ни их положение, ни
аналитическое выражениеJ.
Система э.у. должна вывести объект на
экстремальный режим и обеспечить
стабилизацию этого режима. В зависимости
от того, является ли экстремальная
характеистика стабильной или меняется
под влиянием внешних условий, экстремальные
системы делят на 2 класса:
.
При этом неизвестно ни количество
экстремумов, ни их положение, ни
аналитическое выражениеJ.
Система э.у. должна вывести объект на
экстремальный режим и обеспечить
стабилизацию этого режима. В зависимости
от того, является ли экстремальная
характеистика стабильной или меняется
под влиянием внешних условий, экстремальные
системы делят на 2 класса:
статические
динамические, которые мы и будем рассматривать.
В динамических э.с. возможны два случая:
изменения экстремальной характеристики от некоторого параметра известны;
изменения экстремальной характеристики от некоторого параметра неизвестныиэ.х. зависит от многих факторов случайным образом.
Для примера рассмотрим одномерный объект с экстрем. зависимостью J(x,z)
Пусть J(x,z)
имеет переменное экстрем. значениеJ при неизменном значении
![]()

В этом случае достаточно каким–либо
образом один раз определить положение
экстремума
![]() ,
а затем применить обычную систему
стабилизацииJпри значении
,
а затем применить обычную систему
стабилизацииJпри значении
![]() .
.
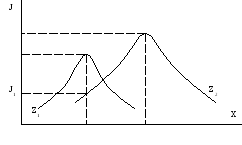
Если э.х. одномерного объекта изменяется
произвольно как по горизонтали, так и
по вертикали, то необходимо применить
экстремальное управление, обеспечивающее
слежение за экстремумом. Допустим, при
Z1поддерживался
режим с
![]() .
В результате возмущающих воздействий
Z2
э.х. изменилась и
.
В результате возмущающих воздействий
Z2
э.х. изменилась и
![]() .
Для экстремального управления необходимо
определить новое положение
.
Для экстремального управления необходимо
определить новое положение
![]() ,
при котором
,
при котором
![]() .
.
В зависимости от способа поиска экстремума xэ.с. делят на системы:
с определением производной
 для точки
для точки

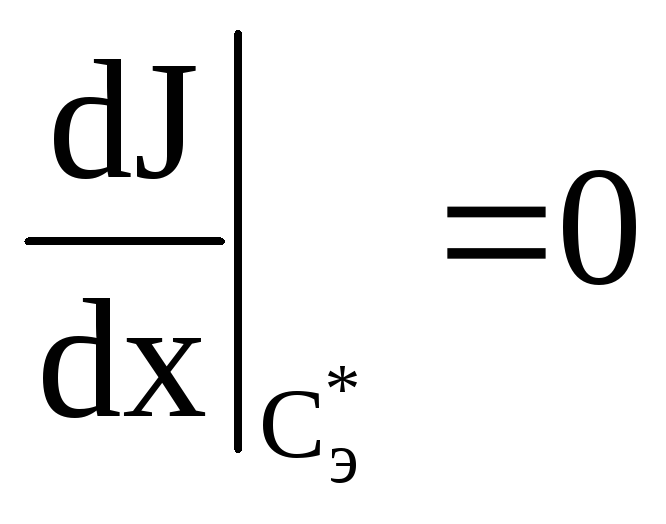 .
.с определением знака призводной, в точке экстремума

 меняет знак.
меняет знак.шаговые системы, принцип действия которых основан на том, что через определенные интервалы времени измеряются J1 и J2, которые запоминаются в ЗУ1 и ЗУ2, сравнивниваются и в зависимости от их изменения производится реверс управляющего сигнала x.
системы с запоминанием экстремума, для определения с*используют ЗУ, которое реагирует только на увеличение сигналаJ. До тех пор, покаmax не достигнут сигнал с увеличивается, при достиженииJmax, сигнал с начинает уменьшаться, увеличиваяJmax.Процесс этот периодически повторяется.
Существуют и другие способы поиска экстремумов, а значит и другие разновидности э.с.
Работа системы экстремального управления представлениа на структурной схеме
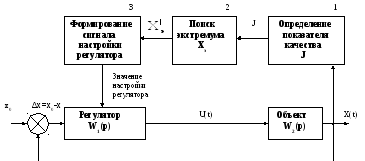
Здесь W1(p)
иW2(p)
– передаточные функции регулятора и
объекта управления. Работа системы
реализуется по замкнутому принципу.
Текущее состояние объекта x(t) оценивается
в блоке 1 с помощью значения показателя
качестваJ. Блок 2 по
значениюJвырабатывает
очередное значение
![]() ,
которое не обязательно будет оптимальным.
Блок 3 формирует сигнал на перестройку
регулятора, в результате которой
изменяется его передаточная функцияW1(p). Сигнал
управления будет изменен, изменится
соответственно и состояние объекта.
Этот процесс будет осуществляется до
тех пор, пока
,
которое не обязательно будет оптимальным.
Блок 3 формирует сигнал на перестройку
регулятора, в результате которой
изменяется его передаточная функцияW1(p). Сигнал
управления будет изменен, изменится
соответственно и состояние объекта.
Этот процесс будет осуществляется до
тех пор, пока
![]() ,
,
![]() .
.