Линейные системы с постоянными параметрами
Последовательности дискретных сигналов
ЛПП – системы
Разностные уравнения
Частотная характеристика
Последовательность дискретных сигналов.
Математики дискретные сигналы представляют в виде непрерывной последовательности чисел:
{h(n)}, {h(nT)}, h(n), h(nT), N1 n N2
При графическом изображении последовательностей используются два способа.
а) в виде отрезка в точке h0
б) в виде огибающей
Наиболее важные последовательности, используемые при ЦОС:
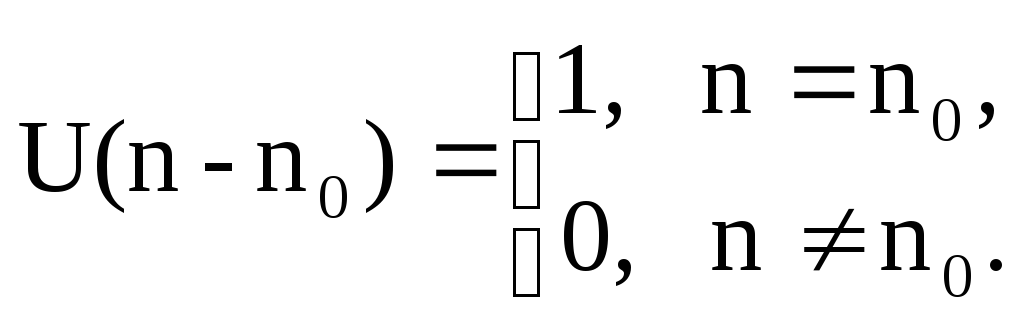
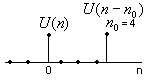
Цифровой единичный импульс (отсчет)
![]()
Единичный импульс, задержанный на n0 отсчетов
Е
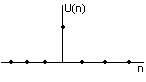
 диничный
скачок
диничный
скачок
![]()
Единичный скачок связан с единичным импульсом соотношением:
![]()
Убывающая экспонента
![]()

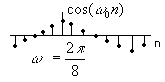
Косинусоида
![]()
 для
всех n.
для
всех n.
Комплексная экспонента:
ejn = cos(n) + jsin(n).
Для ее изображения нужны разделенные графики для действительной и мнимой частей.
Произвольная последовательность
a(0), a(1), a(2),…,a(n), где a(n) – величина n-го элемента
![]()
Линейные системы с постоянными параметрами (лпп).
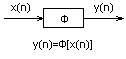
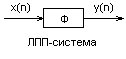
Дискретная система с входной x(n) и выходной y(n) последовательностями
Линейная система:
если x1(n), x2(n) входные последовательности,
y1(n), y2(n) соответствующие им отклики линейной системы.
При подаче на вход линейной системы входной последовательности ax1(n)+bx2(n) на выходе образуется выходная последовательность ay1(n)+by2(n), где a и b произвольные постоянные.
Система с постоянными параметрами:
Если x1(n), соответствует y1(n),
То x1(n-n0), соответствует y1(n-n0).
В ЛПП входная и выходная последовательность связана соотношением типа свертки. Пусть h(n) – отклик системы на единичный импульс (импульсная характеристика системы). Тогда входная последовательность:
![]()
Поскольку h(n) – отклик системы на последовательность U0(n), а параметры системы постоянны, то h(n-m) будет откликами на последовательность U0(n-m). Из свойства линейности следует, что откликом на последовательность x(m)U0(n-m) должна быть последовательность x(m)h(n-m). Поэтому отклик на x(n) будет равен:
![]()
Он имеет вид свертки. Таким образом, h(n) полностью описывает ЛПП систему, что и отражено на рисунке.
Разностные уравнения.
Описание ЛПП - системы разностными уравнениями позволяет:
найти эффективные способы построения таких систем
определить многие характеристики системы (собственные частоты, порядок системы и др.)
Самый общий вид линейного разностного уравнения М-го порядка с постоянными коэффициентами, относящегося к физически реализуемой системе:
![]()
где коэффициенты {ai},{bi}описывают конкретную систему, причем аМ0.
Уравнение (1) записано в виде, удобном для решения методом прямой подстановки. Имея набор начальных условий [напр. X(i),y(i) для i=-1, -2, …, -M] и входную последовательность X(n), по формуле (1) можно вычислить последовательность y(n) для n0. Например, разностное уравнение y(n) = x(n) – 3y(n-1) с начальными условиями y(-1)=0,x(n)= n2+n можно решить подстановкой:
y(0) = x(0) - 3y(-1) = 0
y(1) = x(1) - 3y(0) = 2
y(2) = x(2) - 3y(1) = 0
y(3) = x(3) - 3y(2) = 12
y(4) = x(4) - 3y(3) = -16
. . .
Существуют методы решения разностных уравнений в явном виде. Основная идея их сводится к получению двух решений р.у.: однородного и частного.
Важное значение р.у. состоит в том, что они непосредственно определяют способ построения цифровой системы.
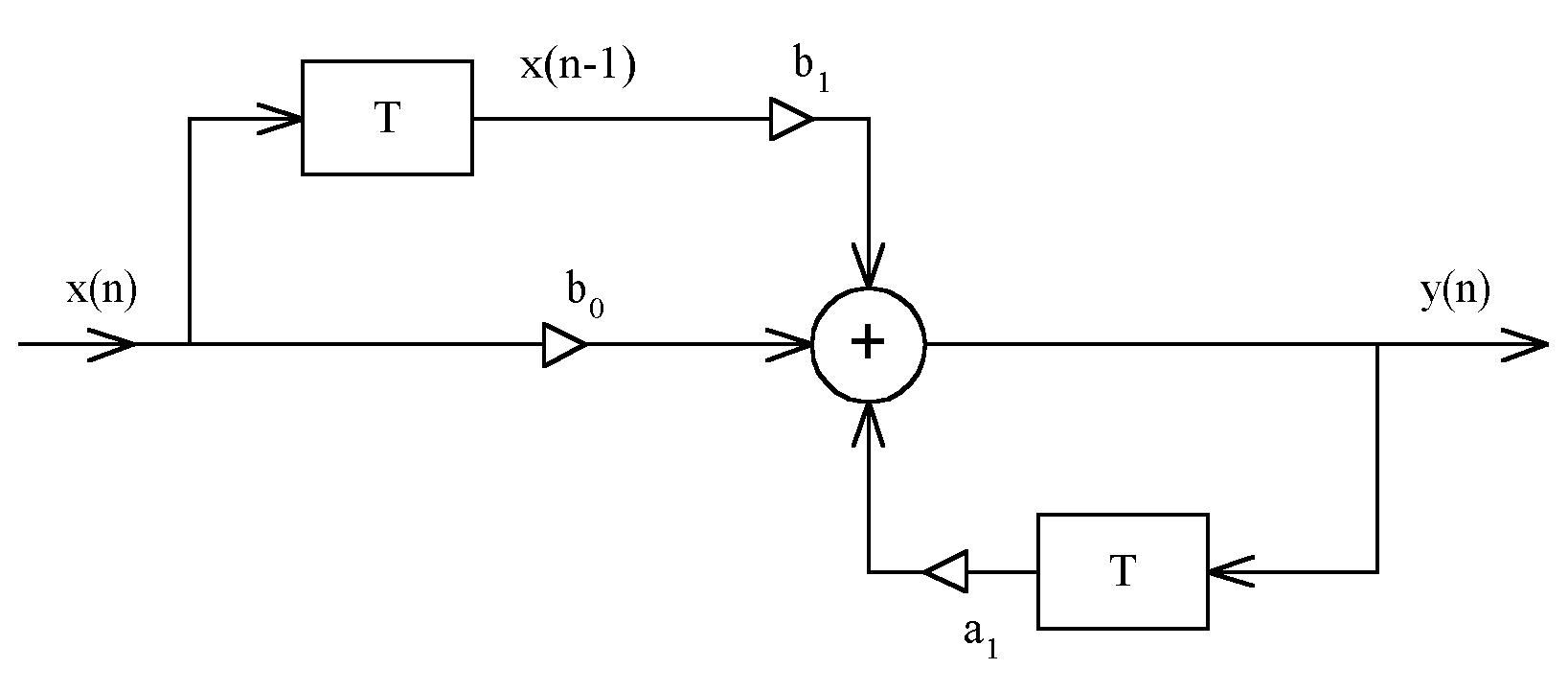
Пример:
y(n) = - a1y(n-1) + b0x(n) + b1x(n-1)
Его можно реализовать с помощью схемы: