Замкнутая импульсная система
Ошибка системы
![]()
![]() -
может иметь разрывы в момент квантования
-
может иметь разрывы в момент квантования
![]() .
.
При определении решетчатой функции
![]() следует
оговорить
следует
оговорить
![]() или
или
![]() .
.
Будем считать предел справа, т.к. импульсный элемент формирует именно правое значение.
![]()
Полагая
![]() ,
окончательно находим:
,
окончательно находим:
![]() .
.
Для определения
![]() нужно это уравнение решить, что возможно,
например, с помощью дискретного
преобразования Лапласа.
нужно это уравнение решить, что возможно,
например, с помощью дискретного
преобразования Лапласа.
Уравнение импульсных многомерных систем
![]()
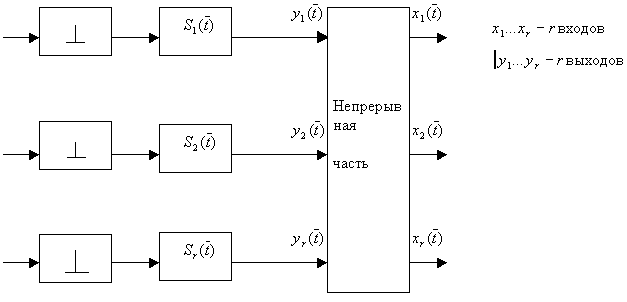
Все импульсные элементы работают синхронно и синфазно.
![]() ,
,
![]()

![]()
Пусть
![]() -
фундаментальная матрица.
-
фундаментальная матрица.
![]() ,
приx(0)=0
,
приx(0)=0
![]()
![]()
![]() ,
,
![]()
![]() .
.
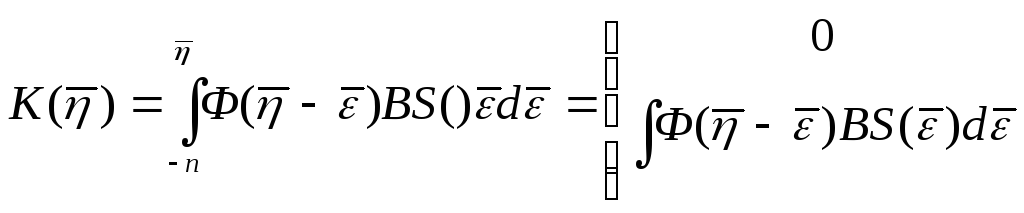
Матрица
![]() ,
при
,
при
![]()
![]()
![]()
Тогда уравнение импульсной системы можно представить как
![]() или полагая
или полагая
![]()
![]()
![]() -уравнение
ошибки
-уравнение
ошибки
![]()
Z - преобразование. Определение и условие существования.
Z-преобразование рассматривается применительно к сигналу с импульсной модуляцией.
![]() при
при
![]() <0,
<0,
![]() <
<
![]() – условие достаточное, но не необходимое.
Если выбрать значенияg(t)
приt=nT, то
существует
– условие достаточное, но не необходимое.
Если выбрать значенияg(t)
приt=nT, то
существует
![]() , гдеz=e
, гдеz=e![]()
![]()
Это выражение с точностью до множителя Tявляется полной аналогией непрерывного преобразования.
![]() , так какdt=T,
аnT=t, поэтому
дискретное преобразование Лапласа
называют ещё обобщённым преобразованием.
, так какdt=T,
аnT=t, поэтому
дискретное преобразование Лапласа
называют ещё обобщённым преобразованием.
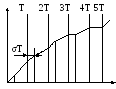
Пример:
![]() ,
,
![]()
Геометрическая прогрессия: an=a1qn-1;Sn=![]() ;
;![]()
![]() -z-преобразование для
непрерывной функции.
-z-преобразование для
непрерывной функции.
![]() -z-преобразование для
непрерывной функции с запаздыванием.
-z-преобразование для
непрерывной функции с запаздыванием.
В более общем виде условия существования
z-преобразования для
дискретной функции![]() ,
,![]() ,
гдеn<0.
,
гдеn<0.
Н етрудно
доказать сходимость ряда
етрудно
доказать сходимость ряда![]() :
Рассмотрим ряд
:
Рассмотрим ряд![]() ,
представляющий геометрическую прогрессию
со знаменателем
,
представляющий геометрическую прогрессию
со знаменателем![]() ,
которая сходится приq<1
или
,
которая сходится приq<1
или![]() и его сумма равна
и его сумма равна
![]() .
Но каждый член
.
Но каждый член
![]() ,
где
,
где![]() =R=ecT– радиус сходимости.
=R=ecT– радиус сходимости.
Связь z-преобразования с преобразованием Лапласа.
![]() -
аналитическая дискретная функция.
-
аналитическая дискретная функция.
![]() -
дельта Функция.
-
дельта Функция.
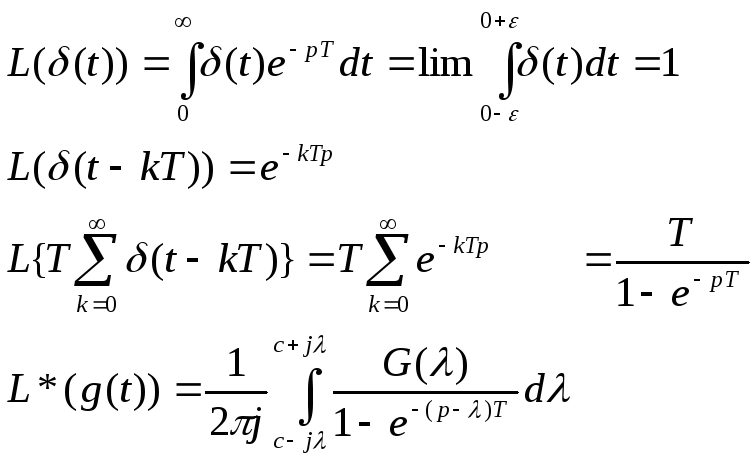
Эта формула устанавливает связь между преобразованием Лапласа для непрерывной функции и соответствующим z-преобразованием.
Прямая интегрирования должна лежать
правее полюсов G(λ)
и левее![]() .
Равенство справедливо приRep>c0– абсцисса абсолютной сходимости.
.
Равенство справедливо приRep>c0– абсцисса абсолютной сходимости.
Вычислим интеграл с помощью вычетов.
П олюсы
подынтегральной функции внутри контура
интегрирования будут совпадать с
олюсы
подынтегральной функции внутри контура
интегрирования будут совпадать с
![]() ,
,![]() ;z=epT
;z=epT
С помощью этой формулы удобно определить z-преобразование по известному преобразованию Лапласа непрерывной функции.
Определение оригинала по известному z-преобразованию.
g(kT)![]()
Если k>nиi>n, то в этой формуле всеbiприi>nиakпропадут:
![]()
Эти формулы позволяют, не производя каждый раз деления, определять дискретные значения функции оригинала для дробно-линейных преобразований z. Формулы очень удобны для вычислений и могут быть использованы для вычисления переходных процессов в непрерывных системах.
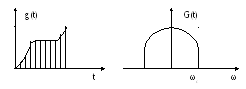
Теорема Котельникова.
Устанавливает эквивалентность непрерывного и дискретного сигналов.
Точная формулировка теоремы применима к непрерывным сигналам со спектром, ограниченным по частоте.
Допустим, что имеем непрерывный сигнал
g(t), спектр
которогоG(ω)
равен нулю при![]()
В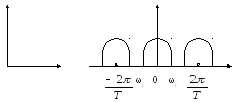
 озможны
3 случая:
озможны
3 случая:
1.![]()
2.![]()
3.![]()
при
![]()
Определение и свойства преобразования с запаздыванием.
![]()
При σ→0 z-преобразование переходит в обычноеz-преобразование.
1.![]()
2.![]()
3.
![]()


![]()
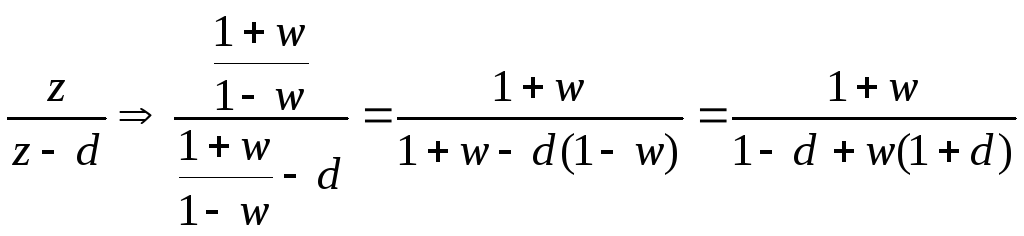
Определения и свойства w-преобразования.
z=epT – замена
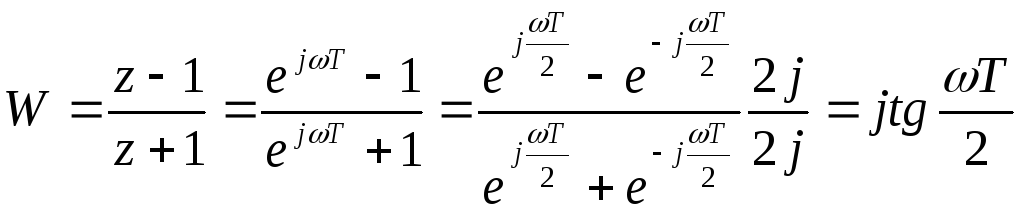
wz+w=z-1![]() w+1=z(1-w)
w+1=z(1-w)
![]()
![]()
 и
тогдаe-at
и
тогдаe-at![]()
Некоторые теоремы z-преобразования.
Теорема линейности.