

Рассмотрим систему
![]()
![]()
![]()
![]()
![]()
![]() ,
где
,
где![]()
Теорема: Линейная система с постоянными
параметрами
![]() является устойчивой в смысле Ляпунова
тогда и только тогда, когда
является устойчивой в смысле Ляпунова
тогда и только тогда, когда
А) все характеристические числа А имеют неположительные действительные части.
Б) любому характеристическому числу на мнимой оси кратности mточно соответствуетmсобственных векторов матрицы А.
Теорема: Динамическая система с
постоянными параметрами
![]() является асимптотически устойчивой
тогда и только тогда, когда все
характеристические числа матрицы А
имеют строго отрицательные действительные
части.
является асимптотически устойчивой
тогда и только тогда, когда все
характеристические числа матрицы А
имеют строго отрицательные действительные
части.
Например:
1.Смесительный бак.
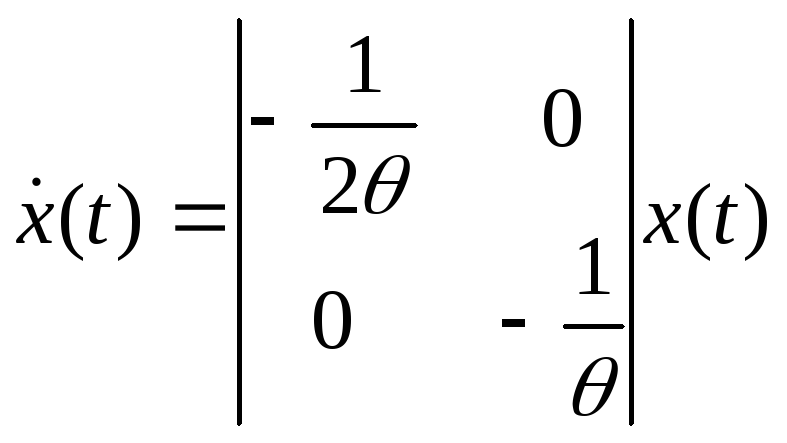 :
x1(t)=x1(0)e
:
x1(t)=x1(0)e![]() ,
x2(t)=x2(0)e
,
x2(t)=x2(0)e![]()
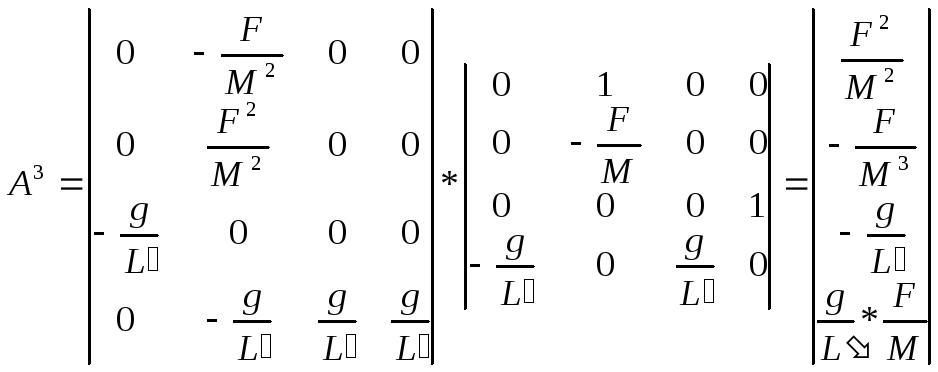
2. Перевернутый маятник
 ,
,
![]()
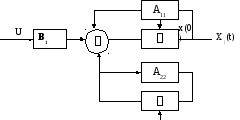
Подпространства устойчивых и неустойчивых состояний
![]()
![]()
Пусть k={1m}=M,J=M+J-M
m-количество характеристических
чисел матрицы А с неотрицательной
действительной частью матрицы А
![]()
n-m- количество характеристических чисел с отрицательными корнями.
Тогда подпространство RmRnбудет подпространством неустойчивых
состояний![]()
![]()
Управляемость.Определение управляемости.
Постановка задачи: определение свойств
динамической системы (функции ее
параметров), при которых осуществим
перевод системы из произвольного
состояния x(0) в
произвольное состояние![]() ,
,![]() .
.
Определение : линейная динамическая
система
![]() будет полностью управляемой , если ее
можно перевести из х(0) в х(1) за время
будет полностью управляемой , если ее
можно перевести из х(0) в х(1) за время![]() .
.

![]() новое
конечное состояние.
новое
конечное состояние.
Теорема. Линейная динамическая система
полностью управляема, если она может
быть переведена из начала координат в
состояние х(1) за конечное время (![]() ).
).
Пример: смесительный бак имеет равные
входные концентрации![]() .
Приращение концентрацииСв этом
случае неуправляемо.
.
Приращение концентрацииСв этом
случае неуправляемо.
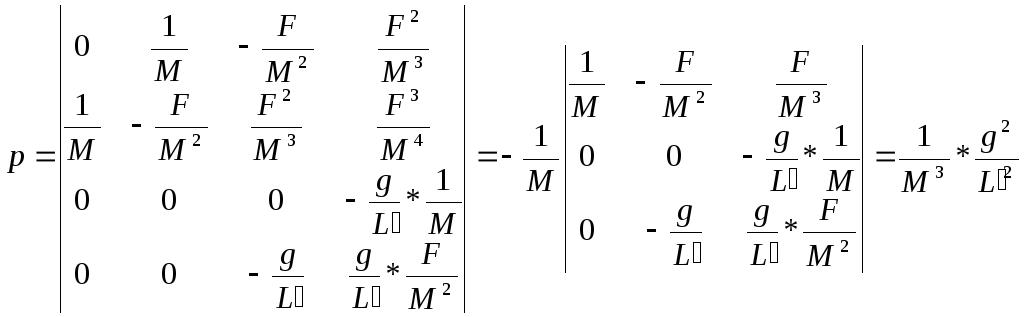
Теорема: Линейная динамическая система
![]() полностью управляема, если матрица
Р=(В, АВ, А2В, …, Аn-1В)
порождаетn-мерное
пространство.
полностью управляема, если матрица
Р=(В, АВ, А2В, …, Аn-1В)
порождаетn-мерное
пространство.
![]()
В последовательности матриц В, АВ, А2В должна появиться матрица АlВ=В0+АВ1+…+Ад-1Вlи далее Аl+1В=АВ0+АВ1+…+АlВl. Вектор-столбцы матрицы АlВ линейно зависят от вектор-столбцов матрицы В АВ А2В …Аl-1В.
х(t1)-принадлежит линейному подпространству, порожденному вектор-столбцами АВ.
Если эти вектор-столбцы не порождают n-мерное пространство можно достичь только состояний меньшей размерности, поэтому система не является полностью управляемой. Если система полностью управляема, вектор-столбцы матрицы Р порождаютn-мерное пространство.
Положим, что Р порождает n-мерное
пространство. Тогда выбравu(t)
в коэффициентах![]() ,
можно получить,что любому вектору
,
можно получить,что любому вектору
![]() будет удовлетворять указанное равенство
будет удовлетворять указанное равенство


Подпространство управляемых состояний.
Лемма. Если вектор х принадлежит подпространству управляемых состояний, то вектор Ах также принадлежит этому подпространству
![]()

Теорема. Линейная динамическая система переходит из состояния х0в состояние х1, принадлежащих пространству управляемых состояний, за конечное времяt1
![]()
х0- принадлежит пространству управления.
![]() - принадлежит пространству упрвления
на основании свойства инвариантности
- принадлежит пространству упрвления
на основании свойства инвариантности
![]() - принадлежит , т.к х1и еA(t1-)тоже принадлежит.
- принадлежит , т.к х1и еA(t1-)тоже принадлежит.
Формула показывает, что система
переводится из нулевого состояния в
![]() за конечное время, что тоже самое из х0в х1.
за конечное время, что тоже самое из х0в х1.
Пусть rank P=m.
![]() е
е m– линейно-независимые столбцы управления
m– линейно-независимые столбцы управления
Т1=(е1…еm), T2=(em+1…en).
Введем
![]()
![]()
![]()
![]()
![]()
U2T1=0
T1состоит из е1…еmпорождающих пространство управляемых состояний, следовательно,U2x=0.
![]()
![]()
T1, АТ1– принадлежит пространству управляемых состояний
U2AT1=0
B– часть матрицы управляемости и принадлежит пространству управляемых состояний
U2B=0
 -
каноническая форма управляемости
-
каноническая форма управляемости
![]() -матрицаm*m
-матрицаm*m
![]() -полностью
управляемая пара. Поведение системы
-полностью
управляемая пара. Поведение системы![]() -полностью
независимо.
-полностью
независимо.
С
X2(0)
![]()
![]()
если С1=С2=С, то С0=С

Наблюдаемость.
Пусть y(t,t0,x0,u)
является выходной функцией линейной
динамической системы
![]()
![]() изменяющейся от начального состоянияx(t0).
Система называется полностью наблюдаемой,
если для всехtiсуществует такой моментt0,
где -<t0<t1, что из равенстваy(t,t0,x0,u)=y(t,t0,x0,u),t0tt1
, для всехu(t)t0tt1
следуетx0=x0.
изменяющейся от начального состоянияx(t0).
Система называется полностью наблюдаемой,
если для всехtiсуществует такой моментt0,
где -<t0<t1, что из равенстваy(t,t0,x0,u)=y(t,t0,x0,u),t0tt1
, для всехu(t)t0tt1
следуетx0=x0.
Теорема:
Система
![]() y=Cx, является
полностью восстанавливаемой в том и
только в том случае, если для всехti
существует такой моментt0
-<t0
<t1, что из
равенстваy(t,t0,x0,0)=0t0tt1следуетx0=0
y=Cx, является
полностью восстанавливаемой в том и
только в том случае, если для всехti
существует такой моментt0
-<t0
<t1, что из
равенстваy(t,t0,x0,0)=0t0tt1следуетx0=0
![]()
![]()
![]()
СФ(t,t0)x0=CФ(t,t0)x0 , x0=x0, СФ(t,t0)(x0-x0)=0
Наблюдаемость означает, что имеется возможность определения состояния в момент t0 по будущим значениям выходной переменной.
![]() Линейная
динамическая система
Линейная
динамическая система![]() полностью наблюдаема (восстанавливаема),
еслиrankматрицы
полностью наблюдаема (восстанавливаема),
еслиrankматрицы
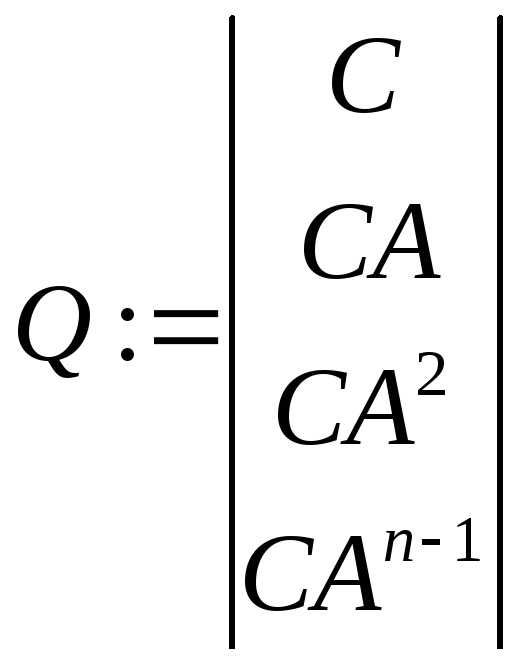 равенn.
равенn.
![]()
Если матрица Qне имеет полного ранга, то существует такоеx0,что:
Сx0=0 CAx0=0 ….. CA(n-1) x0=0.
Используя теорему Кели-Гамильтона, получим САLx0=0, гдеLn.
Докажем другое утверждение теоремы:
y(t0)=Cx0=0 илиQx0=0
y(t0)=CАx0=0
…………………...
y(n-1)(t0)=CA(n-1) x0=0
Если Qне имеет полногоранга, то равенства не будет.
П ример:
ример:
Rank=2.
Критерий устойчивости линейных динамических систем.
Постановка задачи: рассмотрение
фундаментального решения
![]() динамической
системы
динамической
системы![]() показало его устойчивость, если
действительные части характеристических
чисел матрицы А отрицательны.
показало его устойчивость, если
действительные части характеристических
чисел матрицы А отрицательны.
Определение (прямое) характеристических чисел-процесс трудоёмкий, но не безнадёжный.
Возникает задача: определение отрицательности характеристических чисел матрицы А по самим коэффициентам матрицы А.
Предварительные замечания.
Рассмотрим
характеристическое уравнение:
![]() .
.
Введём вектор р=jи рассмотрим 2 случая:
Имеем вектор i=j-pi, гдеpi=-+j.
И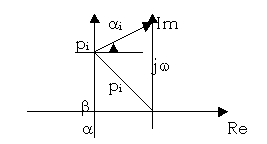 зменим
векторjот -jдо +j.
зменим
векторjот -jдо +j.
Argj=-j i=-/2, Argi=
Argj=+j i=/2.
2 .Имеем
вектор i=j-pi
, pi=+j,
Arg j=-j
i=3/2,
Arg j=j
i=/2,
Argi=-
.Имеем
вектор i=j-pi
, pi=+j,
Arg j=-j
i=3/2,
Arg j=j
i=/2,
Argi=-
Рассмотрим D(j)=Mod D(j)e jArgD(j)
![]()
![]()
Теорема:
Изменение аргумента D(j) при возрастанииот -доравно разности между числом (n-m) корней уравненияD(j)=0, лежащих в левой и правой полуплоскостях, умноженной на, т.е.(n-m)-m.
Критерий устойчивости Михайлова:
![]()
Если все корни отрицательны, то рi :Reрi<0argD(j)=n
D(j)=u()+jv(), гдеu()=а0–а22+а44-…..
v()=а1–а33+а55-…..
Так как u()- функция четная, аv()-функция нечетная, тоD(j)=-D(j), т.е. годографD(j) симметричен относительно действительной оси.
Cистема автоматического управления устойчива, если при возрастанииот 0 довекторD(j) повернётся на уголn/2, гдеn-степень полиномаD(j)=0 или его годограф обходит последовательно в положительном направленииnквадрантов.
С истема
находится на границе устойчивости, если
характеристическая кривая проходит
через начало координат.
истема
находится на границе устойчивости, если
характеристическая кривая проходит
через начало координат.
Критерий устойчивости Раусса-Гурвица.
Основное соотношение, определяющее устойчивость Arg0<<D(j)=n
u()=(а0n–а2n-2+а4n-4-...+ аn)
v()=(а1n-1–а3n-3+а55-…+аn-1),D(j)=аipn-1.
Для того, чтобы система D(j) была устойчивой, необходимо и достаточно, чтобы все главные определители определителю Гурвица были положительны.
Частотный критерий устойчивости Найквиста-Михайлова.
И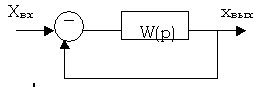 меем
систему
меем
систему
![]()
![]()
Введём
функцию
![]()
D(j)=Dp(j)+Mp(j)
Arg0<<D(j)=(n-2m)/2
Arg (j)=Arg D(j)-Arg Dp(j)=(n-2m)/2-n/2=-m.
С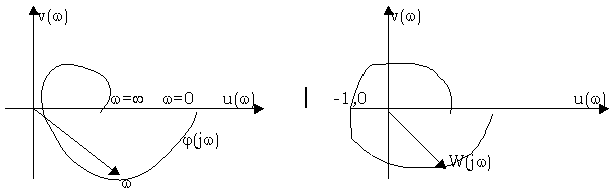 истема
будет устойчива, если изменение аргументаArg(j)=0,
т.е. если годограф характеристики(j)
не охватывает начало координат.
истема
будет устойчива, если изменение аргументаArg(j)=0,
т.е. если годограф характеристики(j)
не охватывает начало координат.
Но W(j)=(j)-1, т.е. замкнутая система устойчива, если частотная характеристика разомкнутой системы не охватывает точку (–1,0) при изменении 0<<.
Если разомкнутая система неустойчива, то argDp(j)=(n-2p)/2
Если
замкнутая система устойчива, то arg(j)=argD(j)-Dp(j)=n![]()
 Замкнутая
система будет устойчива, если частотная
характеристика неустойчивой разомкнутой
системы охватывает т.-1,0 в положительном
направлении Р1/2 раз, где Р – число
неустойчивых корней.
Замкнутая
система будет устойчива, если частотная
характеристика неустойчивой разомкнутой
системы охватывает т.-1,0 в положительном
направлении Р1/2 раз, где Р – число
неустойчивых корней.
Запас по амплитуде и запас по фазе.
- запас по фазе
20lg(1-A) – запас по амплитуде при проектировании не менее 6 дб.

D-разбиение пространства параметров
Комплексное пространство, мнимая ось которого разделяет его на два полупространства: слева устойчивое, справа – неустойчивое.
D (p)=Dp(p)+Mp(p)
– характеристическое уравнение или
детерминант возвратной матрицы.
(p)=Dp(p)+Mp(p)
– характеристическое уравнение или
детерминант возвратной матрицы.
 УсловиеD(p)=0= -
является функциональной зависимостью
фиксирующей какое-то распределение
корней и параметров. Если взять и
указанную неявную зависимость сделать
явной относительно любого параметра
УсловиеD(p)=0= -
является функциональной зависимостью
фиксирующей какое-то распределение
корней и параметров. Если взять и
указанную неявную зависимость сделать
явной относительно любого параметра
![]() ,
то зависимость будет при р=jпредставлять преобразование пространстваjвU()+jV()=ajи в том же числе мнимую осьj.
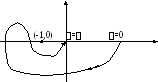
Пусть преобразование может быть
представлено как на рисунке, т.е.
однолистная область преобразована в
многолистную. Как правило, областью
устойчивости является пересечение
областей.
,
то зависимость будет при р=jпредставлять преобразование пространстваjвU()+jV()=ajи в том же числе мнимую осьj.
Пусть преобразование может быть
представлено как на рисунке, т.е.
однолистная область преобразована в
многолистную. Как правило, областью
устойчивости является пересечение
областей.
V(j) U(j)

Пример: p3+p2+p+a0=0
a0=-p3-p2-p a0=2+j(2-1)
U ()=2
V()=(2-1)
0<a0<1
()=2
V()=(2-1)
0<a0<1

Анализ устойчивости одноконтурных динамических систем методом логарифмических АФЧХ.

 Анализ
устойчивости построен на критерии
Найквиста-Михайлова.
Анализ
устойчивости построен на критерии
Найквиста-Михайлова.
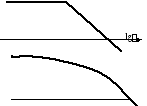

A()=20lg![]()
-![]()
1).Для устойчивости замкнутой системы, у которой частотная характеристика разомкнутой системы первого рода, необходимо и достаточно, чтобы 1ср<0cр.
2 ).
Для устойчивости системы в замкнутом
состоянии необходимо и достаточно,
чтобы разность между числом положительных
и отрицательных переходов()
через -равнялась
0.
).
Для устойчивости системы в замкнутом
состоянии необходимо и достаточно,
чтобы разность между числом положительных
и отрицательных переходов()
через -равнялась
0.

lg() lg()
() L()


Метод корневого годографа.

![]()
![]()
Совокупность точек рi, удовлетворяющих уравнениюNp(p)+kMp(p)=0 при различныхkiназывают корневым годографом.
При к0 полюсы замкнутой системы стремятся к полюсам разомкнутой системы.
При кполюсы замкнутой системыnстремятся к нулямmразомкнутой системы и (n-m) к бесконечности.
Число асимптот (n-m) определят их углы
 (1)=(0.1…n-m-1).
Все асимптоты пересекаются в одной
точке
(1)=(0.1…n-m-1).
Все асимптоты пересекаются в одной
точке
 (2)
(2)
следует из




У
 частки
годографа на оси абсцисс определяются
действительными нулями и полюсами.
частки
годографа на оси абсцисс определяются
действительными нулями и полюсами.
k=+
Точки отхода годографа от действительной оси определяются следующим образом:
(,0) – координаты точки отхода
(,) – координаты корневого годографа, близкого к оси абсцисс
![]()
Точки пересечения годографа с мнимой осью определяются U()=0V()=0, позволит определитьи к.
Углы выхода годографа из комплексных полюсов и их подходы к комплексным нулям определяются выражением:
 для близкой точки.
для близкой точки.На корневом годографе различают параметр к. Корневой годограф – траектория движения корней в комплексной плоскости р, полученные с помощью уравнений замкнутой системы.
П ример:
ример:![]()
D(p)=p3+3p2+2p+2k,p1=0,p2=1,p3=-2
S0=![]()
![]()
![]()
![]()
![]()
![]() ,
1=-0.422,
2=-1.58
,
1=-0.422,
2=-1.58
U()=-32+2k=0,
=![]()
V ()=j(2-3)=0,
k=3
()=j(2-3)=0,
k=3
Метод Д-разбиения.
![]()
к![]()
![]()
Анализ линейных САУ. Основные компоненты систем управления.
Выход
объект управления
датчик
регулятор
Задача управления или условие функционирования
Пример:
1)саморегулируемая система отопления дома.
2)спутниковая телевизионная антенна.
Общие формализованные черты:
Поведение – система дифференциальных уравнений или модель М.
Математический аппарат для анализа и синтеза получил название решающих процедур Т.
Исходные данные и ограничения А и С.
Проектное решение и его оценка RиK.
Обратная связь и возмущения.
Задание.
Задачи регулирования и слежения.

Переменные:
U(t)-управление
Vp(t)-возмущение
y(t)-наблюдение
Vm(t)-шум измерения
z(t)-управляемая величина
r(t)-задание или эталонная переменная
z(t)r(t)tt0-задача.
В исходных данных на проектирование необходимо учитывать:
неконтролируемость действующих на объект возмущений
недостоверность или переменность параметров объектов
неизвестность начального состояния
наблюдаемая переменная искажена шумом и не несет инфомации о регулируемой величине.
![]()

Разомкнутая система: управление основано только на прошлых и текущих значениях эталонной переменной.
![]()

Пример системы управления.

Замкнутые регуляторы могут накапливать информацию об объекте, его начальном состоянии уменьшать влияние возмущений и компенсировать неопределенность параметров.
Проектирование замкнутых систем.
Дифференциальные уравнения объекта
![]()
![]() .
.
Наблюдаемая переменная
![]() .
.
Управляемая переменная
![]() .
.
Д ифференциальное
уравнение регулятора
ифференциальное
уравнение регулятора![]()
![]() .
.
Критерии качества работы:
Среднеее значение квадрата ошибки слежения Се(t) и среднее значение входной переменной Сu(t) определяется выражениями:
![]()
![]()
![]()
![]()
![]()
![]() и
и
![]() – заданные неотрицательно определенные
симметричные весовые матрицы в частном
случае диагональные.
– заданные неотрицательно определенные
симметричные весовые матрицы в частном
случае диагональные.
Основной принцип проектирования:
При проектировании следует добиваться
минимума
![]() и
и
![]() .
.
1.Сначала вычисляют
![]() и
и
![]()
![]()
2.Затем вычисляют
![]()
![]()
3.![]()
![]()
Введем обозначения:
![]()
![]()
Подставим
![]() ,
где
,
где
![]() -постоянная
или средняя часть входного воздействия.
-постоянная
или средняя часть входного воздействия.
![]() -переменная
или вариабельная часть.
-переменная
или вариабельная часть.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Матрица повариационных плотностей
энергии![]()
процесса
![]()
Например экспоненциального корректирования шума
![]()
Квадратичные формы.
![]()
![]()
Допущения:
Система управления ассимптотически устойчива.
Система управления имеет постоянные параметры и постоянные матрицы
 и
и

 и
и

В случае многомерной векторной системы имеем:

![]()
![]()
![]()
Одномерная система управления
Входная величина и выходная (управляемая) переменная скалярные.
Принимаем
![]()
![]()
![]()
![]()
Для минимизации
![]() нужно придерживатьсь следующих принципов.
нужно придерживатьсь следующих принципов.
О пределение:
Для минимизации
пределение:
Для минимизации
![]() малого установивщегося значения средне
квадратичной ошибки слежения передаточная
функция
малого установивщегося значения средне
квадратичной ошибки слежения передаточная
функция
![]() линейной системы с постоянными параметрами
следует выбирать таким образом, чтобы
выражение
линейной системы с постоянными параметрами
следует выбирать таким образом, чтобы
выражение
![]() принимало минимальное значение для
всех действительных
принимало минимальное значение для
всех действительных
![]() .
В частности если заданные точки нулевые
.
В частности если заданные точки нулевые
![]()
![]() .
.
Общий подход: Разделить диапазон частот:
там, где значительное
![]() нужно иметь минимальное
нужно иметь минимальное
![]() и наоборот.
и наоборот.

Полоса частот
![]() ,
где
,
где
![]() .
Полоса частот – интервал
.
Полоса частот – интервал
![]() .
.
Если
![]() то
то
![]() называется частотой среза. При
называется частотой среза. При
![]() =0,01
определяют
=0,01
определяют
![]() как 1% частоту среза.
как 1% частоту среза.
Определение: Пусть rскалярный процесс со спектральной
плотностью энергии
![]() .
Полоса частот
.
Полоса частот
![]() определяется как
определяется как
![]() и содержит заданную часть
и содержит заданную часть
![]() половины энергии процесса
половины энергии процесса
![]() .
.
Если
![]() ,
то говорят об 1% частоте среза, что
означает содержание в интервале
,
то говорят об 1% частоте среза, что
означает содержание в интервале
![]() 99% от половины энергии процесса.
99% от половины энергии процесса.
Д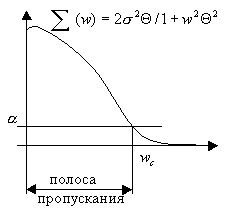 ля
получения малого
ля
получения малого![]() (квадрата ошибки) необходимого чтобы
полоса пропускания частот системы
содержала как можно большую часть полосы
пропускания системы.
(квадрата ошибки) необходимого чтобы
полоса пропускания частот системы
содержала как можно большую часть полосы
пропускания системы.
Рассмотрим
![]()
Для получения малого
![]() нужно иметь
нужно иметь
![]() в полосе частот эталонной переменной.
в полосе частот эталонной переменной.
Следцет отметить что это не означает
что
![]() малая величина, т.к. этот член определяет
постоянную часть эталонной переменной,
т.е от заданной рабочей точки во входной
переменной. Второй член важен для
динамического диапазона входной
переменной и поскольку этот диапазон
ограничен, то входная величина должна
быть ограничена тоже.
малая величина, т.к. этот член определяет
постоянную часть эталонной переменной,
т.е от заданной рабочей точки во входной
переменной. Второй член важен для
динамического диапазона входной
переменной и поскольку этот диапазон
ограничен, то входная величина должна
быть ограничена тоже.
Однако принципы проектирования
![]() и
и
![]() - противоречивы. Систему можно
спроектировать так, чтобы удовлетворялся
один из принципов.
- противоречивы. Систему можно
спроектировать так, чтобы удовлетворялся
один из принципов.
![]()
![]()
Выберем
![]() :
:
Если
![]() при
при
![]() то это означает, что
то это означает, что
![]() при
при
![]() должно увеличиваться, а это означает,
что
должно увеличиваться, а это означает,
что
![]() остается большим в частотном диапазоне
входного сигнала
остается большим в частотном диапазоне
входного сигнала
![]() . Это приводит к перегрузке системы.
. Это приводит к перегрузке системы.
Задача синтеза регулятора, основаная на частотных методах.
Порядок решения:
Составляют математическое описание объекта.
Выбирают регулирующий орган и силовой привод, усилитель и датчики.
Составляют передаточные функции и строят ЛАФЧХ и ФЧХ.
По заданным требованиям на частотные характеристики строят желаемые частотные характеристики ЛАФЧХ и ФЧХ.
По построенным желаемым и действительным частотным характеристикам определяют тип и место введения корректирующих устройств.
Корректирующие устройства бывают последовательные, параллельные и комбинированные.
Последовательные корректирующие
устройства достаточно просты, но их
включение всегда приводит к увеличению
частоты среза и следовательно полосы
пропускания системы при
![]() , т.е. когда
, т.е. когда
![]() .
.
При этом приходится применять более быстодействующие приводы и большим потреблением мощности.
Параллельные корректирующие устройства более сложные, но они сужают полосу пропускания.
В сложных системах применяют как пораллельные, так и последовательные методы.
Выбор характеристик двигателя.
Зависимость массы и номинальной выходной мощности.
Выбор механической передачи
![]()
![]() -момент
инерции ротора
-момент
инерции ротора
![]() момент
инерции якоря двигателя .
момент
инерции якоря двигателя .
Синтез последовательных и параллельных корректирующих устройств.
![]()

![]()
![]()
![]()

Синтез параллельного устройства
![]()
![]()
![]()
![]()