

Основные понятия и определения теории управления
1)СистемойSназывается отношение на непустых
абстрактных множествах![]() где множествоVi- объект системы. ЕслиIконечно то
где множествоVi- объект системы. ЕслиIконечно то![]()
2)Пусть![]() и
и![]() образуют разбиение множестваI.
образуют разбиение множестваI.
![]() - условие полноты;
- условие полноты;
![]() - условие единственности;
- условие единственности;
![]() - входные объекты или вход;
- входные объекты или вход;
![]() - выходные объекты или выход;
- выходные объекты или выход;
![]() - система вход-выход (черный ящик).
- система вход-выход (черный ящик).
Если Viявляются функциями времени и пространства
то система динамическая.Viв основном представляются в виде
мультипликации параметраaiи переменнойxi
![]() .
.
Если параметр aiне зависит от времени и пространства, то система будет с постоянными параметрами.
Если ai является функцией пространства, то система называется с распределенными параметрами.
Если ai является функцией времени, то система называется с распределенными параметрами.
Для того чтобы служить различным целям в различных конкретных системах теория движения удовлетворяет предельно общему и чисто математическому подходу.
Нами в подходе будут использованы следующие принципы:
аксиоматическое введение понятий с самым строгим исследованием поведения;
одинаковое отношение как к системам целенаправленного поведения так и к системам преобразующим входные величины в выходные;
математические структуры, обеспечивающие формализацию основных отношений, должны обеспечивать строгость и общность утверждений.
Определение и основные свойства линейного пространства
Пусть V- множество элементов с двумя операциями:
а) сложение элементов множества;
б) умножение элементов множества на число.
Аксиомы:
Если
![]()
Если
![]()
Следствия или свойства
Свойство 1:Сложение векторов
коммутативно![]() .
.
Свойство 2:Сложение векторов
ассоциативно![]() .
.
Свойство 3:Существует хотя бы один
элемент![]() .
.
Свойство 4:Для всякого элемента![]() существует хотя бы один
существует хотя бы один![]() .
.
Свойство 5:Существует хотя бы один
элемент![]()
Описание состояния системы
Возьмем список величин (скалярных)
![]()
![]()
![]() .
Введем систему векторов
.
Введем систему векторов![]()
![]()
Система векторов
![]() называется линейно-независимой или
базисом, если
называется линейно-независимой или
базисом, если![]() справедлива только приai=0iJ={1N}.
справедлива только приai=0iJ={1N}.
Рассмотрим систему уравнений
a11x1+a12x2+…+a1nxn+b11u1+b12u2+…+b1mum=0
a21x1+a22x2+…+a2nxn+ b21u1+b22u2+…+b2mum=0
an1x1+an2x2+…+annxn+ bn1u1+bn2u2+…+bnmum=0
Которую в матричной форме можно записать:
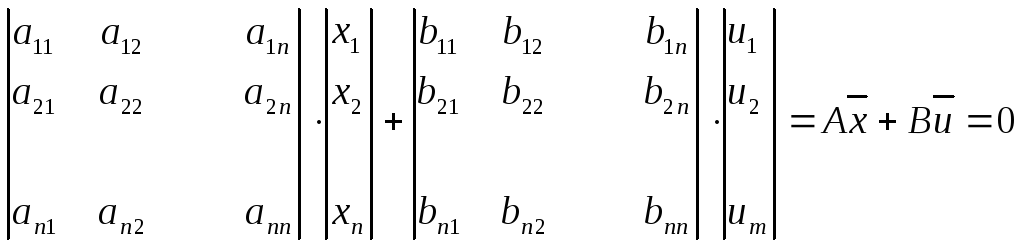
Это алгебраическая система линейных
уравнений, которые связывают вектор
зависимых переменных (состояний)
![]() и вектор независимых или произвольных
переменных
и вектор независимых или произвольных
переменных![]() (управлений).
(управлений).
Решение такой системы уравнений известно
![]() и требует несингулярнотси матрицы А.
и требует несингулярнотси матрицы А.
Рассмотренные уравнения инвариантно по времени.
Разрушим эту инвариантность, потребовав
![]() - форма Коши, т.е. сделав
- форма Коши, т.е. сделав![]() (t)
– функцией времени, а систему динамической.
(t)
– функцией времени, а систему динамической.

![]() - вектор состояния;
- вектор состояния;
![]() – уравнение состояния;
– уравнение состояния;
![]() - вектор управления;
- вектор управления;
![]() - уравнение выхода;
- уравнение выхода;
![]()
![]() -
переходная функция.
-
переходная функция.
В общем случае система может быть описана системой дифференциальных уравнений:
![]() – состояние
– состояние
![]() – выход
– выход
![]() – переходная функция
– переходная функция
Линеаризация
1)Пусть имеем динамическую систему
![]()
![]() где
где![]()
![]()
![]()
![]() и
и![]() –
матрицы Якоби
–
матрицы Якоби
![]()
![]() – начальное условие
– начальное условие
2)Конечные разности
![]()
![]()
![]()
![]()
![]()
4)Метод наименьших квадратов
5)Гармоническая линеаризация
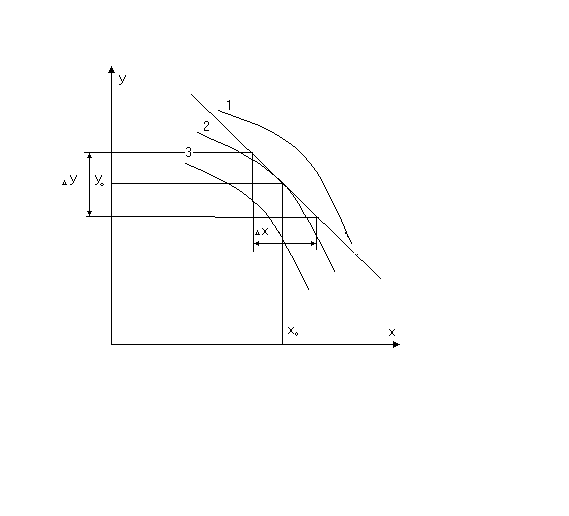
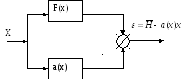
Класс существенно нелинейных элементов можно разделить на группы:
а) однозначные нелинейности ![]()
б) многозначные нелинейности ![]()
![]()
a)
для однозначной нелинейности b)
для многозначнойнелинейности


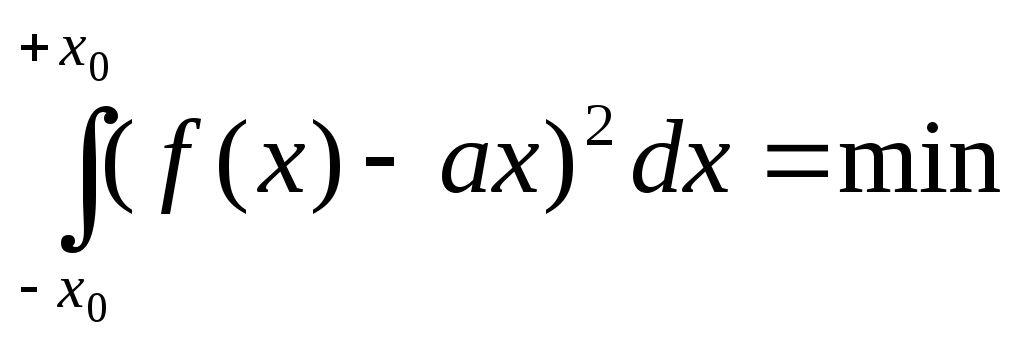
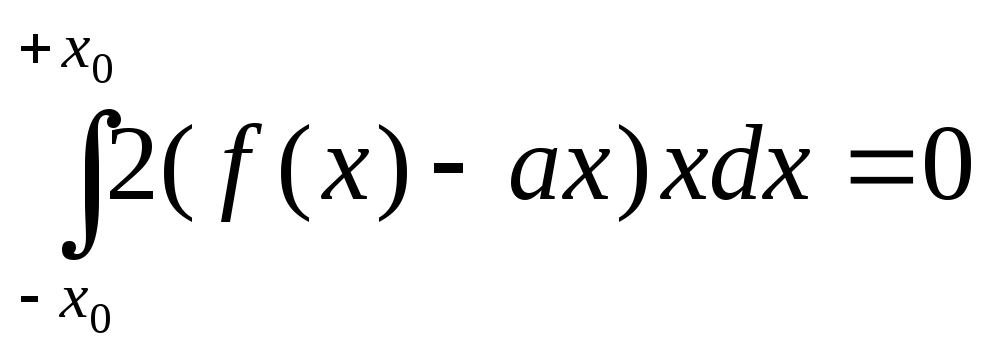
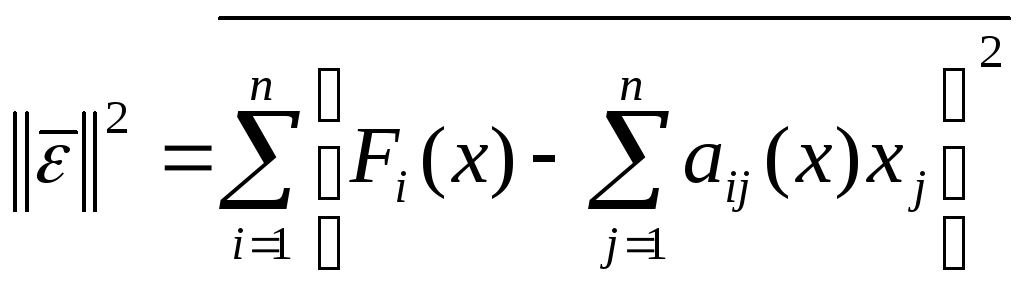
Минимизация ошибки
![]()
Среднее значение квадрата разности,
где
![]()
В общем случае
![]()
 - алгебра.
- алгебра.
Для определения
![]()
![]() (см. в конце)
(см. в конце)
Пример.Система управления перевернутого маятника.
S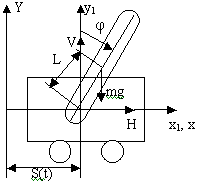 (t)
– линейное положение
(t)
– линейное положение
φ(t) – угловое положение
m– масса маятника
М – масса тележки
Н – горизонтальная сила реакции
V– вертикальная сила реакции
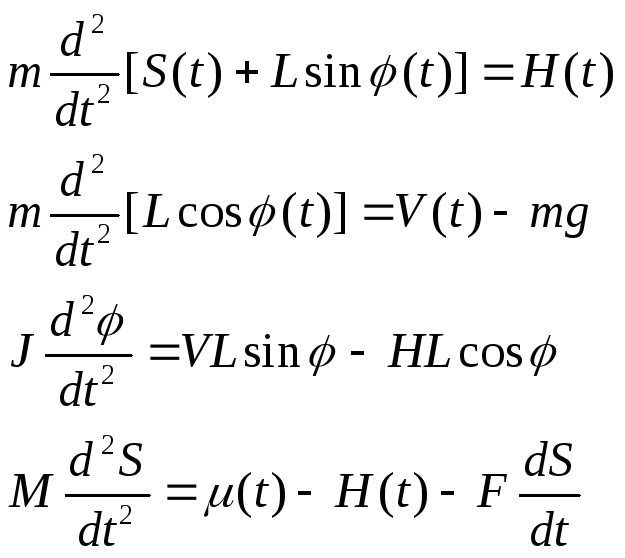
Предположим, что H(t)≈0,т.к.m<<M и φ- мал.
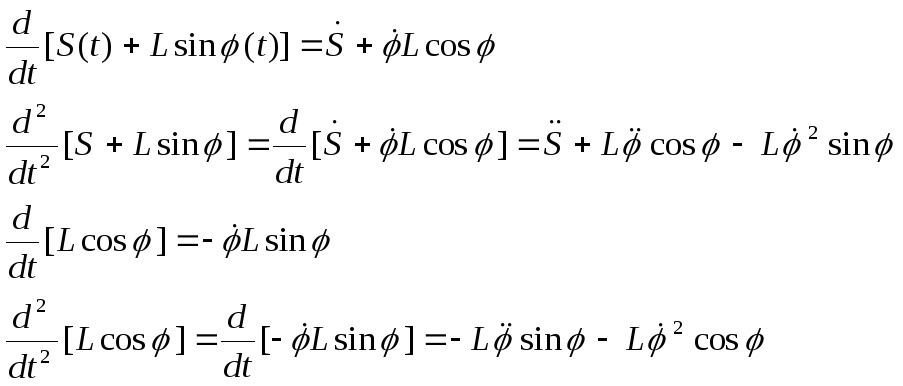
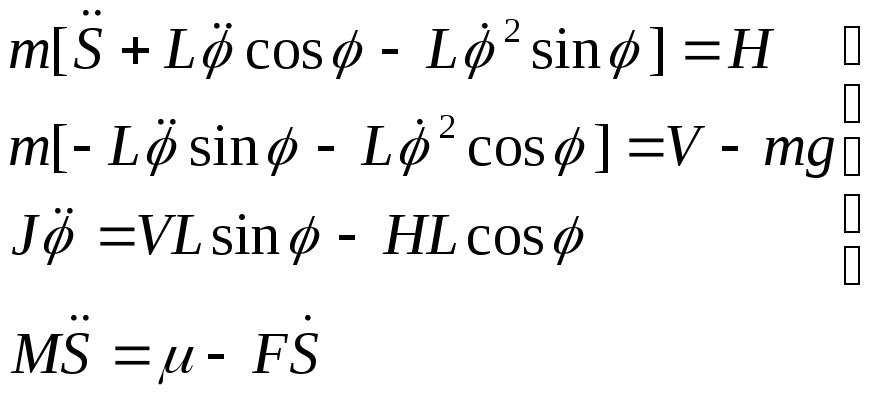
Тогда система уравнений имеет вид:
![]()
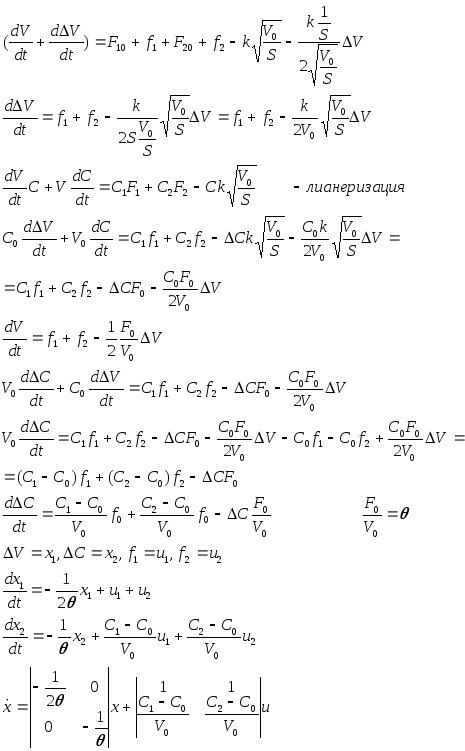
Л![]() инеаризация:
инеаризация:

- согласно исходному уравнению
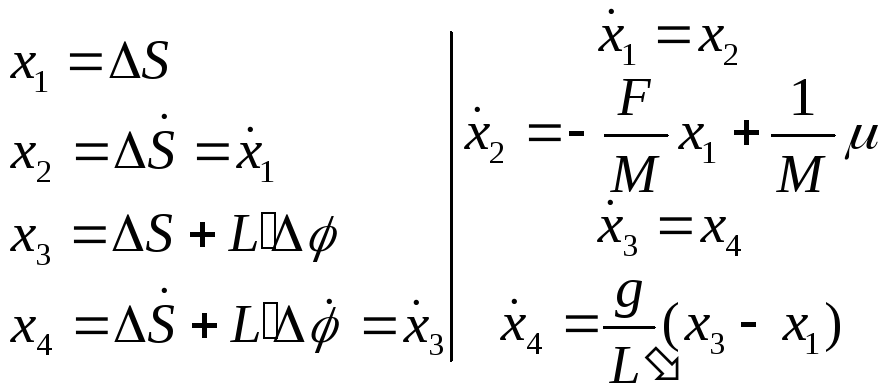
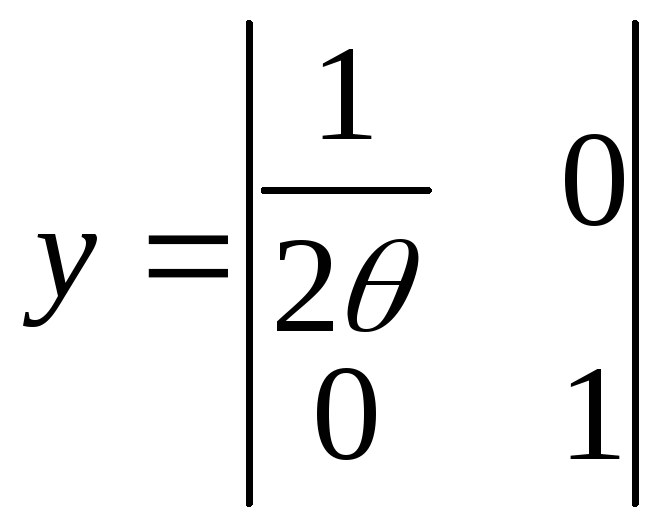
В окончательном виде:

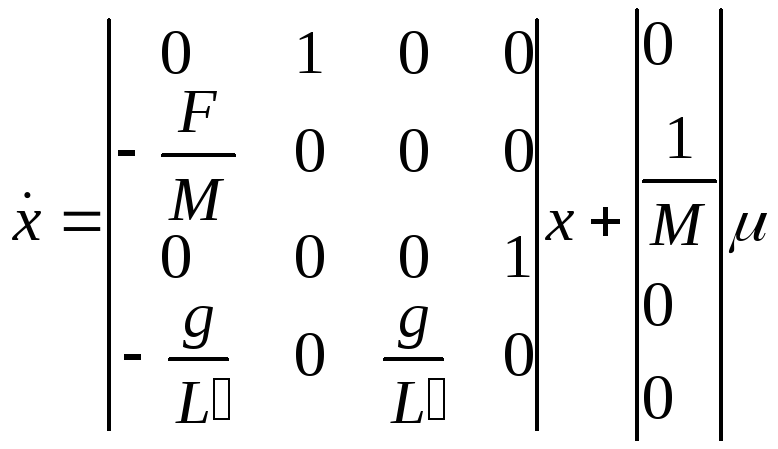 F/M=1
сек-1 1/М=1 кг-1
F/M=1
сек-1 1/М=1 кг-1
g/L’=11,65 сек-2 L’=0,482 м.
Пример:Смесительный бак.
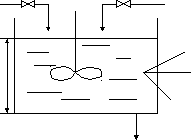 РасходF1РасходF2
РасходF1РасходF2
Конц. С1Концентрация С2
V– объем
hС - концентрация
S- площадь
Расход F
Концентр. С
Баланс масс
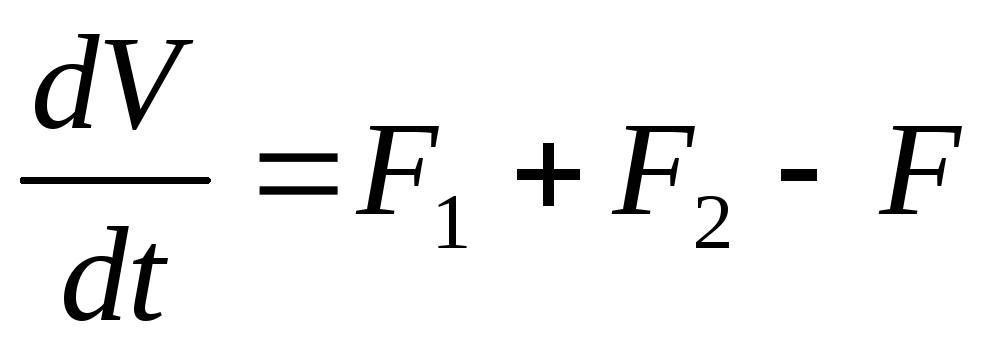 .
.Баланс концентраций
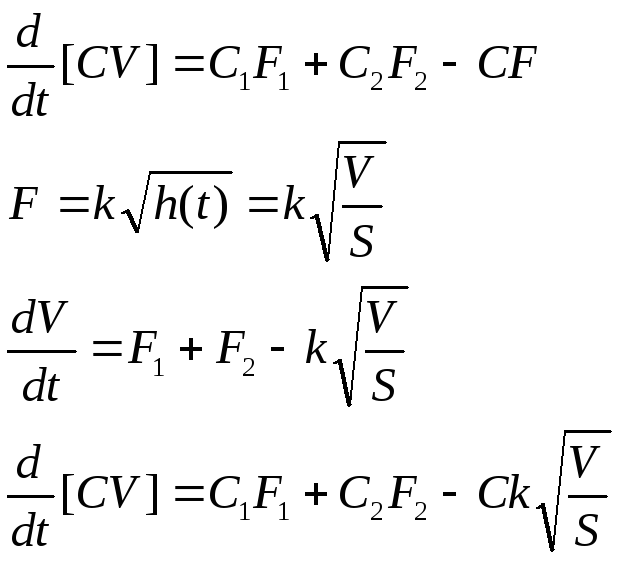
Установившееся состояние
Пусть F1=F10+f1
F2=F20+f+2
V=V0+v
C=C0+ξ
Пусть 
 F10=0,015
м3/сек С1=1
кмоль/м3
F10=0,015
м3/сек С1=1
кмоль/м3
F20=0,005 м3/сек С2=2 кмоль/м3
F0=0,02 м3/сек С0=1,25 кмоль/м3
V0=1 м3 θ=50 сек