

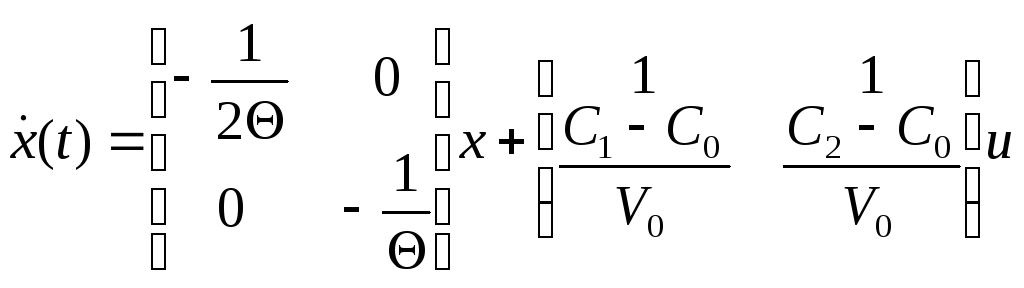
Переходная матрица
![]() - уравнение состояния.
- уравнение состояния.
Теорема 1.Для однородного
уравнения![]() ,
гдеА– постоянная величина, для
всехtвсегда существует
решение,
,
гдеА– постоянная величина, для
всехtвсегда существует
решение,![]() .
.
Переходная матрица
![]() является решением матричного
дифференциального уравнения:
является решением матричного
дифференциального уравнения:
![]() для всехt.
для всехt.![]() .
.
Теорема 2.Переходная матрица![]() линейной
дифференциальной системы имеет следующие
свойства:
линейной
дифференциальной системы имеет следующие
свойства:
1)
![]() ,
,![]() ;
;
2)
![]() - неособая для всех
- неособая для всех![]() ;
;
3)
![]()
![]()
4)
![]() -
сопряженная система.
-
сопряженная система.
Доказательство.
![]()
![]()
![]()

Теорема 3.Для линейного неоднородного
дифференциального уравнения![]() гдеB(t) иu(t) –
кусочно-непрерывные функции, решение
имеет вид
гдеB(t) иu(t) –
кусочно-непрерывные функции, решение
имеет вид

![]()
Рассмотрим систему с выходной переменной y=Cx.

Если
![]() ,
то
,
то
![]() импульсная
переходная функция.
импульсная
переходная функция.
Экспонента от
![]()
![]()
![]()
![]() или
или
![]()
Почему использовали термин “ Экспонента
от
![]() ”?
”?
![]()
![]()
![]()
4. Решение уравнения
![]() при
при![]() имеет вид:
имеет вид:
![]()
Далее эвристически покажем, что
![]() можно рассматривать как бесконечный
ряд
можно рассматривать как бесконечный
ряд
![]()
При


При почленном дифференцировании имеем:

Устойчивость линейных систем с постоянными параметрами
Рассмотрим
![]() где
где![]() ).
Система устойчива, если малые отклонения
от положения равновесия, т.е. решения
).
Система устойчива, если малые отклонения
от положения равновесия, т.е. решения![]() остаются малыми при сколь угодно большом
увеличении времени и наоборот система
неустойчива, если малые отклонения
становятся сколь угодно большими.
остаются малыми при сколь угодно большом
увеличении времени и наоборот система
неустойчива, если малые отклонения
становятся сколь угодно большими.
![]()

Определение
Система![]() устойчива, если евклидова норма
устойчива, если евклидова норма![]() остается ограниченной при
остается ограниченной при![]() ,
т.е. для любого
,
т.е. для любого![]() и
и![]() существует
существует![]() ,
такое что
,
такое что![]() ,
то
,
то![]() для
для![]() .
.
Решение является асимптотически или
абсолютно устойчивой, если
![]()
Решение является экспоненциально
устойчивым, если
![]()
![]()
Устойчивость линейных систем с постоянными параметрами
![]()
![]() где
где![]() - собственные векторы,
- собственные векторы,![]() –
скаляры, определяемые через
–
скаляры, определяемые через![]() .
.
Линейная система ![]() является устойчивой в смысле Ляпунова
тогда и только тогда, когда все
характеристические числа матрицыАимеют неположительные действительные
части, и любому характеристическому
числу на мнимой оси кратностиmточно соответствуетmсобственных векторов матрицыА.
является устойчивой в смысле Ляпунова
тогда и только тогда, когда все
характеристические числа матрицыАимеют неположительные действительные
части, и любому характеристическому
числу на мнимой оси кратностиmточно соответствуетmсобственных векторов матрицыА.
Задачи операционного исчисления.

Операционное исчисление Лапласа.
Оригинал и изображение.
Оригинал – любая функция![]() действительного аргументаt,
удовлетворяющая условиям:
действительного аргументаt,
удовлетворяющая условиям:
а) кусочно - непрерывности за исключением конечного числа точек разрыва первого рода;
б)
![]()
![]()
в) существуют
![]() ,
,![]() такие, что для всехt
такие, что для всехt
![]()
Изображение:
![]()
![]() или
или![]()
Пример.


![]() , при
, при![]() .
.
Пример.
![]()
Пример.

Теорема:Изображение
![]() оригинала
оригинала![]() определено в полуплоскости
определено в полуплоскости![]() ,
где
,
где![]() – показатель роста оригинала.
– показатель роста оригинала.
![]()
Действительная и мнимая части изображения
Простейшие свойства преобразования Лапласа
Линейность:
![]() ;
;![]() =>
=>![]()
Подобие:
![]() и
и![]() то
то![]()
Запаздывание:
![]()
Пример
![]()

Система с постоянными параметрами
![]() является асимптотически устойчивой
тогда и только тогда, когда все характерные
числа матрицы А имеют строго отрицательные
действительные части.
является асимптотически устойчивой
тогда и только тогда, когда все характерные
числа матрицы А имеют строго отрицательные
действительные части.
Дифференцирование оригинала
![]()
Интегрирование оригинала

Формула обращения
![]()
Изображение
 ;
;![]()
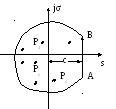
Корни знаменателя
![]() ,
являющиеся полюсами дробно-рационального
изображения
,
являющиеся полюсами дробно-рационального
изображения![]() ,Суть
,Суть![]() с кратностями
с кратностями![]() .
Если
.
Если
![]() ,
,![]() ,
то
,
то
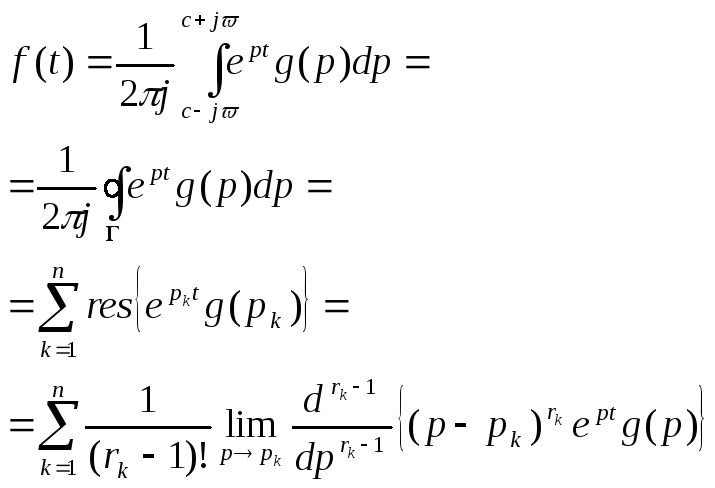
Теорема:если изображение![]() является дробно-рациональной функцией
со степенью числителя меньше степени
знаменателя, имеющего корни
является дробно-рациональной функцией
со степенью числителя меньше степени
знаменателя, имеющего корни![]() кратности
кратности![]() ,
то оригинал определяется следующим
(см. выше) образом.
,
то оригинал определяется следующим
(см. выше) образом.
Следствие: Если![]() ,
где корни простые, то
,
где корни простые, то![]()
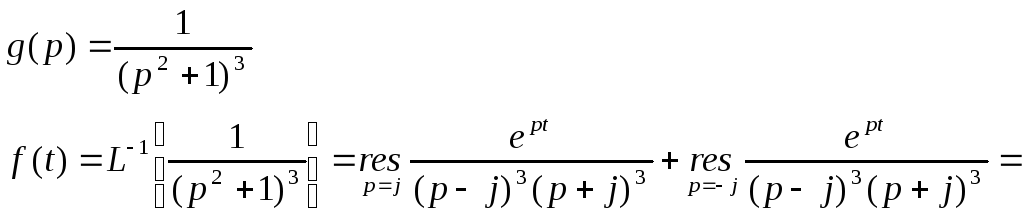
Пример 1:

Пример 2:

Анализ систем с постоянными параметрами на основе преобразования Лапласа
Решение дифференциального уравнения состояния.
![]()
![]()
![]()
Теорема:Пусть матрица системыАявляется постоянной матрицей размерности![]() тогда
тогда![]() или
или![]() где
где![]() резольвента матрицыА.
резольвента матрицыА.
Рассмотрим постоянную матрицу А,
размерности
![]() с характеристическим полиномом
с характеристическим полиномом![]() тогда
тогда![]() где
где![]()
![]()
![]()
![]()
Пусть
![]() тогда
тогда![]() при
при![]() имеем
имеем![]() или
или![]() где
где![]() -
матричная передаточная функция системы.
-
матричная передаточная функция системы.
Пример 1.




Теорема о конечном значении
![]()
![]()
![]()
Теорема о наименьшем значении
![]()
![]()
![]()
![]()
С![]()
![]() оединения
линейных систем
оединения
линейных систем

![]()
![]()
Введем расширенный вектор состояния

![]()
![]()
Если
![]()
![]() ,
,
то
![]()

 (1)
(1) (2)
(2)
Cистема (1) не имеет прямой связки, что позволяет избежать неявных алгебраических уравнений.
![]()
![]()
![]()

![]() – матрица возвратной разности
– матрица возвратной разности
![]() - матрица усиления контура
- матрица усиления контура
С![]() татические
и астатические системы
татические
и астатические системы
![]()
r-y2– ошибки системы управления.
![]()
![]()
при условии,
что
![]()
Система является статической, т.е. имеет
ошибку в установившемся состоянии, если
числитель и знаменатель функции
![]() имеют свободные члены не зависимые отp.
имеют свободные члены не зависимые отp.
Если же функция
![]() имеет нуль какого-либо порядка приp=0,
то система является астатической первого
порядка.
имеет нуль какого-либо порядка приp=0,
то система является астатической первого
порядка.
Система имеет астатизм порядка , если передаточная функция имеет нуль порядка.
Пусть
![]()
![]()
![]()
![]()
Типовые звенья систем автоматического регулирования
Передаточная функция

Каждый полином (числитель и знаменатель) может быть представлен в виде разложения на простые множители
![]()
![]()
Амплитудная частотная характеристика
![]()
![]()

Логарифмическая амплитудно-частотная характеристика
![]()
![]()
Асимптотические логарифмические характеристики
![]()
![]()
Наклон
![]()
О шибка
шибка![]()
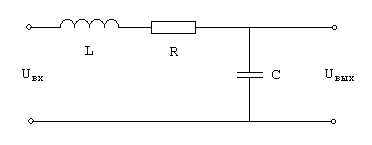
К![]() олебательное
звено
олебательное
звено
![]()
![]()
![]()
LC=T2
RC=2T
![]()
Ч астотная
характеристика
астотная
характеристика
=0

Корни характеристического уравнения
![]()
![]()
Если =0, то=0=1/T=0
![]()
![]()
![]()
![]()
![]()

Логарифмическая характеристика
Lg ![]()
40
дб/дек![]()
1)
![]()
2 )
)![]()
И нтегрирующее
звено
нтегрирующее
звено
![]()
Uвх=Ri,
![]() ,
,![]()
![]()
V()![]()

-/2
Дифференцирующее звено
W(p)=Tp
W(j![]() )
)![]() ,
h(t)=T(t)
,
h(t)=T(t)
![]()

Форсирующее звено первого порядка
W(p)=Tp+1
W(j)=jT+1
![]()
![]()
![]()
Усилительное звено
W(j)=k,L()=k
![]()
Устойчивость. Определение устойчивости.
Задача: Рассмотрение поведения дифференциальных уравнений на длительном интервале времени.
Пусть уравнение состояния имеет вид
![]() .
.
Исследовать будем
![]() приu(t)=0,x0(t)
– номинальное решение
приu(t)=0,x0(t)
– номинальное решение![]()
Определение: Пусть
![]() -
дифференциальное уравнение с номинальным
решением. Номинальное решение устойчиво
по Ляпунову, еслиt0и>0 существует(,t0)>0
такое, чтоx(t0)-x0(t0)<,x(t)-x0(t)<t>t0,
)<,x(t)=
-
дифференциальное уравнение с номинальным
решением. Номинальное решение устойчиво
по Ляпунову, еслиt0и>0 существует(,t0)>0
такое, чтоx(t0)-x0(t0)<,x(t)-x0(t)<t>t0,
)<,x(t)=![]()

Определение: номинальное решение x0(t) уравнения состоянияx(t) является асимптотически устойчивым, если
А) оно устойчиво по Ляпунову
Б) t0существует(t0)>0
такое, что приx(t0)-x0(t0)<(t0)
![]()
Определение: Номинальное решение x0(t)
уравнения состояния![]() является асимптотически устойчивой в
целом (большом), если оно
является асимптотически устойчивой в
целом (большом), если оно
А) устойчиво по Ляпунову
Б) для любого и t0x(t)-x0(t)0 приt
Три условия (случая):
Ограниченность начального отклонения Ограниченность дальнейшего отклонения.
Ограниченность начального отклонения сходимость к 0 дальнейшего отклонения (устойчивость в малом).
Неограниченность начального отклонения сходимость к 0 дальнейшего отклонения (устойчивость в большом).
Для нелинейных систем устойчивость решений, а для линейных
-устойчивость систем, т.к. если
![]() и
и
![]() ,
то
,
то![]() .
.![]()
Определение: линейная динамическая система устойчива в определенном смысле (по Ляпунову, асимптотически как в малом так и большом), если травиальное решение устойчиво в этом смысле x0(t)0.
Теорема. Линейная динамическая система
![]() асимптотически устойчива тогда и только
тогда, когда она асимптотически устойчива
в целом.
асимптотически устойчива тогда и только
тогда, когда она асимптотически устойчива
в целом.
Теорема следует из безусловной продолжаемости решений.
Теорема: линейная динамическая система
с переменными параметрами
![]() является экспоненциально устойчивой,
если существуют положительные константыитакие, что
является экспоненциально устойчивой,
если существуют положительные константыитакие, что![]() t>t0.
t>t0.
Устойчивость линейных систем с постоянными параметрами.