

Классический метод решения дифференциальных уравнений:
Ищется в виде суммы Х(t)=XСВ(t)+XУСТ(t).
![]()
В левой части уравнения находится свободная составляющая, которая определяет вид кривой переходного процесса. В правой части - установившаяся составляющая.
Алгоритм решения:
а) Отыскание общего решения однородного уравнения (свободной составляющей), при правой части уравнения равной нулю.
б) Отыскание частного решения неоднородного уравнения вынужденной составляющей.
в) Получение общего решения неоднородного уравнения.
г) Получение решения линейного уравнения.
Пример:
![]()
а)
![]() .
.
Решение ищется в виде
![]() ,
гдер- корни характеристического
уравнения. В зависимости от вида
корней решение записывается в виде:
,
гдер- корни характеристического
уравнения. В зависимости от вида
корней решение записывается в виде:
1) вещественные корни р1р2.![]()
2) вещественные корни р1=р2.
![]()
3) комплексные корни pi=j.![]()
p1 >0, p2>0
Аналогично при р1=р2.
pi=j.<0гармонические колебания, затухающие по экспоненте.
<0 расходящиеся гармонические колебания.
б)Вид вынужденной составляющейXУСТ(t) определяется видом правой части:
u(t)=L(t)ektL - многочлен в степениm.k- не является корнем характеристического уравнения.
XУСТ(t)=M(t)ekt.M- полином степениm.
Если L(t)=const, тоM(t)=const.
Если k=0, то решение в видеM(t).
Если kявляется корнем характеристического уравнения, тоXУСТ(t)=tM(t)ekt
в)Общее уравнение записывается в виде суммы
Х(t)=XСВ(t)+XУСТ(t).
г)Для определения решения уравнения на основании начальных условий определяется значение константC1иC2. Для уравнений 2-го порядка должно быть 2 начальных условия.
Пример:
![]() при
нулевых начальных условиях.
при
нулевых начальных условиях.
а)p2-5p+6=0; p1=2, p2=3.
![]()
б) L(t) e kt, k=1pi.
y(t)=M(t)ekt = (At2+Bt+C)et
![]()
![]()
=![]()
Преобразуем и приравняем к правой части нашего исходного уравнения.
![]()
![]() A=1/2, B=3, C=4.
A=1/2, B=3, C=4.
![]()
в)![]()
г)Собственные решения (t=0).
![]()
![]()
![]() С1=1, С2=-5.
С1=1, С2=-5.
![]()
Виды зависимостей (отношения между переменными)
1) Функциональная зависимость - отображение множества точекх
на множество точек у.y=f(x)
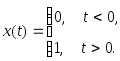
2) Оператор - преобразовывает функцию
х(t)вy(t).x(t)x(p).![]()
3) Функционал - каждой функции x(t)соответствует число (скаляр)А, например,
![]()
Свойства преобразований Лапласа.
1. Упрощение временных функций.
а)
Получили аналитическую функцию комплексной переменной (p=j).
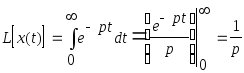
б) Трансцендентная функция.x(t)=e- t
2. Упрощение операций.
Преобразование Лапласа преобразует дифференцирование и интегрирование в алгебраические операции.
![]()
![]()
3. Линейность преобразования Лапласа.
![]()
а) Преобразование Лапласа от суммы - есть сумма преобразований.
б) Постоянный член можно выносить за знак преобразования.
Пример: решение интегро-дифференциального уравнения.
1)
![]() ;
начальные условия:y(0)=2,y'(0)=1.
;
начальные условия:y(0)=2,y'(0)=1.
2) Умножаем на e-ptи проинтегрируем от0до.
![]()
![]()
![]()
Получили алгебраическое уравнение. Решаем его относительно y(p).
![]()