

Глава 3. Механизмы возвратно-поступательного и колебательного движений
§1. Кривошипно-ползунный механизм
В современных приборах и машинах широкое распространение получили рычажные механизмы и в первую очередь кривошипно-ползунный механизм (рис. 2), состоящий из стойки /, кривошипа 2, шатуна 3 и ползуна 4, движущегося в направляющих 5.
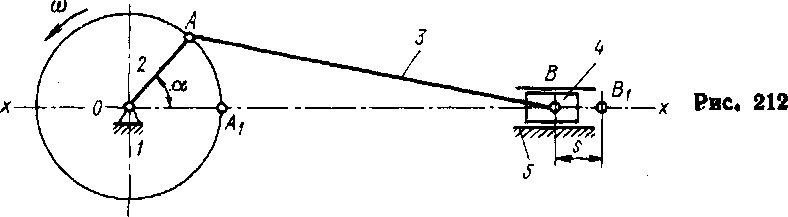 Рис.2
Рис.2
Кривошипно-ползунный механизм служит для преобразования вращательного движения кривошипа в возвратно-поступательное прямолинейное движение ползуна. Наоборот, когда ведущим звеном является ползун, возвратно-поступательное прямолинейное движение ползуна преобразовывается во вращательное движение кривошипа и связанного с ним вала.
Кривошипно-ползунные механизмы широко применяют в поршневых двигателях, компрессорах, прессах, насосах и т. д.
Если прямая, по которой движется центр шарнира, проходит через ось вращения кривошипа Ох, то механизм носит название центрального. Если эта прямая не проходит через точку О, то полученный кривошипно-ползунный механизм называется дезаксиальным или нецентральным.
§2. Кулачковые механизмы
Кулачковые механизмы применяют в тех случаях, когда перемещение, скорость и ускорение ведомого звена должны изменяться по заранее заданному закону, в частности, когда ведомое звено должно периодически останавливаться при непрерывном движении ведущего звена.
Ч аще
всего кулачковый механизм состоит из
трех звеньев (рис. 3, а):
кулачка
1,
толкателя
2
и
стойки 3.
На
рис. 3, б
представлен
четырехзвенный кулачковый механизм
(четвертое звено — ролик 4).
аще
всего кулачковый механизм состоит из
трех звеньев (рис. 3, а):
кулачка
1,
толкателя
2
и
стойки 3.
На
рис. 3, б
представлен
четырехзвенный кулачковый механизм
(четвертое звено — ролик 4).
Кулачковые механизмы подразделяются на плоские и пространственные. Плоскими называют такие кулачковые механизмы, у которых кулачок и толкатель перемещаются в одной или параллельных плоскостях; пространственными — такие, у которых кулачок и толкатель перемещаются в непараллельных плоскостях.
На рис. 4 представлена схема пространственного цилиндрического кулачкового механизма с профильным пазом на боковой поверхности.
Для увеличения стойкости кулачки изготовляют из высококачественной стали с рабочей поверхностью высокой твердости. С целью уменьшения трения и износа на толкателе устанавливают ролик, который вращается на оси и катится без скольжения по рабочей поверхности кулачка (рис. 3, б).
Кроме износа звеньев недостатком кулачковых механизмов является необходимость обеспечивать постоянное соприкосновение (замыкание) между звеньями. В процессе работы кулачкового механизма могут возникать большие силы, главным образом инерционные, направленные на отрыв рабочей поверхности толкателя от кулачка. Для восприятия этих сил применяется либо геометрическое (кинематическое), либо силовое замыкание кинематической цепи.
Геометрическое (кинематическое) замыкание применено в представленном на рис. 4 и 5 механизме с пазовым кулачком. Толкатель движется поступательно. При вращении кулачка ролик толкателя соприкасается с боковыми сторонами паза, прорезанного на кулачке. Паз создает два рабочих профиля кулачка, которые перемещают ролик толкателя в обоих направлениях.
П
 ри
силовом замыкании толкатель во всех
положениях прижат к кулачку с силой,
которая больше силы, стремящейся
оторвать толкатель от кулачка.
ри
силовом замыкании толкатель во всех
положениях прижат к кулачку с силой,
которая больше силы, стремящейся
оторвать толкатель от кулачка.
Замыкающая сила в подавляющем большинстве случаев создается пружиной (см. рис. 3).
К числу недостатков кулачковых механизмов следует отнести сложность изготовления профиля кулачка, от которого требуется большая точность.
В тех случаях, когда толкатель должен перемещаться с периодическими остановками, участки профиля кулачка, соответствующие этим периодам, должны быть очерчены дугами окружности, проведенными из центра вращения кулачка.