

-
Использование сложных сигналов и согласованного фильтра.
Решение проблемы повышения помехоустойчивости систем связи достигается использованием различных методов и средств, в том числе и сигналов сложной формы (с большой базой). Широкое практическое применение получили сложные сигналы на основе дискретных кодовых последовательностей, которые представляют собой последовательности символов длительностью Т, принимающих значения +1 или –1. Такие сигналы легко формируются и обрабатываются с использованием элементов цифровой и вычислительной техники.
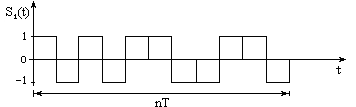
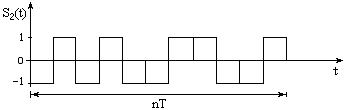
Считая, что символы "1" и "0" передаются сложными сигналами S1(t) и S2(t), которые представляют собой последовательности прямоугольных импульсов положительной и отрицательной полярности длительности Т.
Изобразим форму заданных сигналов при передаче по каналу связи символов "1" и ''0'' в предположении, что и S2(t) = -S1(t), при этом длительность каждого из сигналов равна nT, где n - число элементов сложного сигнала.
Форма сложного сигнала при передаче символа «1»: S1(t) = { 1 -1 1 -1 1 1 -1 -1 1 1 -1 }
Форма сложного сигнала при передаче символа «0»: S2(t) = { -1 1 -1 1 -1 -1 1 1 -1 -1 1 }
Прием этих сигналов осуществляется с помощью согласованного фильтра.
Для достижения наибольшей достоверности их приёма сложные сигналы должны удовлетворять ряду требований:
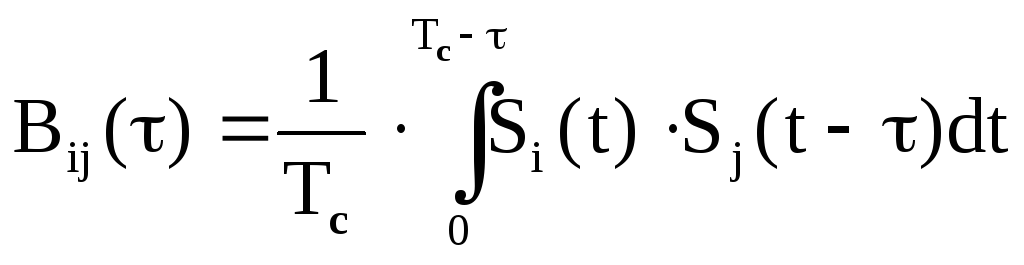
а) корреляционная функция должна содержать значительный максимум (пик);
б) взаимная корреляционная функция любой пары сигналов из используемого ансамбля, определяющая степень их ортогональности, должна быть близка к нулю при любом .
 (26)
(26)
На практике для реальных сигналов последнее условие не может быть выполнено. Поэтому для используемых сигналов важно обеспечить возможно большее отношение Bii() / Bij(), которое и будет определять помехоустойчивость приёма сигналов. В случае передачи двоичных сообщений это будут вероятности P(S1/S2) и P(S2/S1).
Сигнал на выходе согласованного фильтра в произвольный момент времени характеризуется интегралом свёртки, имеющим вид:
![]() ,
(27)
,
(27)
где g() – импульсная характеристика фильтра.
Сигнал на выходе согласованного фильтра совпадает по форме с функцией корреляции входного сигнала: y(t) = аBss (t - t0), (28)
где а – множитель пропорциональности;
t0 – сдвиг в сторону запаздывания.
На практике величину t0 выбирают равной длительности сигнала, т. е. t0 = Tс.
Для корреляционной функции дискретного сигнала общего вида применима формула
![]() ,
(29)
,
(29)
Здесь n указывает количество элементов, на которое осуществляется сдвиг исходного дискретного сигнала (n – целое число, положительное, отрицательное или нуль), так как важнейшей операцией при корреляционной обработке дискретных сигналов с использованием согласованного фильтра является поэлементный сдвиг такого сигнала.
Взаимная корреляционная функция двух дискретных сигналов по аналогии с корреляционной функцией одиночного сигнала определяется формулой
![]() .
(30)
.
(30)
Влияние помехи в линии связи на передаваемый сигнал будет проявляться в изменении полярности элемента дискретного сигнала, т. е. в переходах вида 1 1 и 1 1. При приёме с помощью согласованного фильтра это будет приводить к изменению формы сигнала на его выходе – уменьшению основного и увеличению боковых выбросов, а, следовательно, к снижению помехоустойчивости приёма. Поэтому целесообразно выбрать оптимальную величину порога решающей схемы приёмника, минимизирующую среднюю вероятность ошибки. При равновероятной передаче сообщений оптимальный порог должен выбираться как среднее значение между уровнем основного выброса и максимальным уровнем выброса функции взаимной корреляции.
Использование для передачи сложных сигналов и согласованного фильтра обеспечивает эффективную защиту от импульсных и иногда от сосредоточенных помех.
Прием с использованием сложных сигналов и согласованного фильтра имеет большую помехоустойчивость, чем прием с использованием простых сигналов. Но основным недостатком этого метода является снижение скорости передачи информации вследствие увеличения длительности сложных сигналов.
-
Импульсная характеристика согласованного фильтра
Импульсная характеристика – это отклик фильтра на воздействие единичной импульсной функции. Она определяется выражением: g(t) = a·S(t0 - t), где a = const.
Для согласованного фильтра импульсная характеристика есть зеркальное отображение временной функции сигнала, с которым он согласован, сдвинутым на время t0=Т.
g(t) = a·S(T - t)
График импульсной характеристики g(t) ={ -1 1 1 -1 -1 1 1 -1 1 -1 1 } фильтра согласованного с сигналом S1(t):

-
Схема согласованного фильтра для приема сложных сигналов
Согласованный фильтр для дискретных последовательностей может быть реализован в виде линии задержки с отводами (с общим временем задержки, равным длительности сигнала Тс), фазовращателей (инверторов) в отводах и суммирующей схемы, на выходе которой возникает импульс, равный сумме амплитуд всех элементов сигнала.
Устройства, реализующие согласованную фильтрацию дискретных сигналов, могут быть выполнены также и на основе регистра сдвига с количеством разрядов, равным количеству элементов в кодовой последовательности сигнала. В соответствии с (29) и (30) должны быть перемножители и сумматор. На вход перемножителей поступают принимаемая последовательность с разрядов регистра сдвига и опорная последовательность, совпадающая по виду с импульсной характеристикой входного сигнала с эталонного регистра. Сигналы с выходов всех разрядов перемножителей поступают на сумматор. Очевидно, что максимальный отклик на выходе сумматора будет наблюдаться тогда, когда кодовая последовательность полностью будет введена в регистр сдвига, т. е. в момент окончания входного сигнала.
На выходе сумматора сигнал будет иметь вид ступенчатый вид, поэтому для сглаживания сигнала после сумматора устанавливают интегратор.
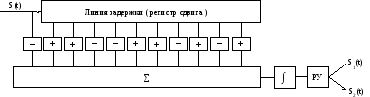
Рис.37
Форма сигнала на выходе согласованного фильтра при поступлении на его вход сигнала, с которым он согласован, с точностью до постоянного множителя представляет собой корреляционную функцию входного сигнала: y(t)=a·Bs(T-t).
При поступлении на вход фильтра помехи, на выходе получаем функцию взаимной корреляции помехи и сигнала, с которым фильтр согласован. Если на вход согласованного фильтра поступает флюктуационная помеха, то теоретически функция взаимной корреляции должна быть равна нулю (т.к. сигнал и помеха являются независимыми функциями времени), но на практике она отлична от нуля (т.к. в нашем же случае время интегрирования ограничено и равно Т, а для вычислении функции взаимной корреляции требуется бесконечно большое время интегрирования).
Импульсная характеристика фильтра согласованного с сигналом S1(t)
S1(t)={ 1 -1 1 -1 1 1 -1 -1 1 1 -1 } g(t) ={ -1 1 1 -1 -1 1 1 -1 1 -1 1}
Найдем сигналы на выходе фильтра при подаче на его вход:
- согласованного с ним сигнала S1(t),
- не согласованного с ним сигнала S2(t),
- периодической помехи.
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
Вых |
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
-1 |
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
-3 |
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
-3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
Рис.38 Сигнал на выходе фильтра при передаче символа "1":
y(t) = ( 0, -1, 2, -1, 0, -1, 0, 3, 0, -3, -4, 11, -4, -3, 0, 3, 0, -1, 0, -1, 2, -1, 0 ):
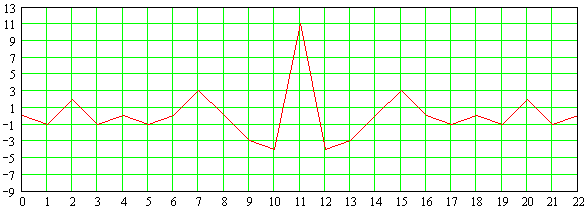
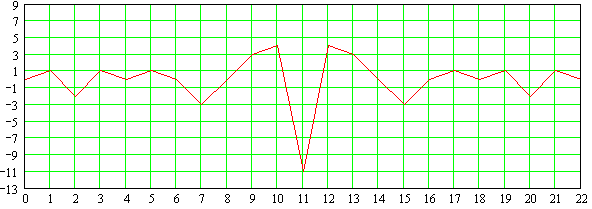
Рис. 39 Сигнал на выходе фильтра при передаче символа "-1":
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
-1 |
1 |
-1 |
1 |
-1 |
1 |
Вых |
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
|
- 1 |
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
|
-1 |
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
|
-1 |
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
|
-1 |
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
1 |
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
1 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
-1 |
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
1 |
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
1 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
-1 |
-4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
1 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
-1 |
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
Рис.40 Сигнал на выходе фильтра при поступлении на вход последовательности
знакопеременных символов { 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1 1 }
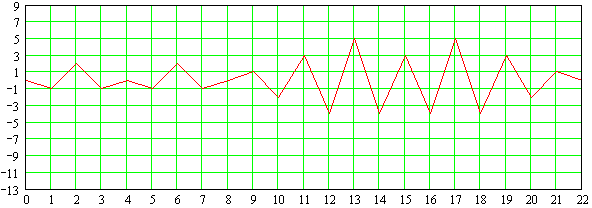
y(t) = ( 0, -1, 2, -1, 0, -1, 2, -1, 0, 1, -2, 3, -4, 5, -4, 3, -4, 5, -4, 3, -2, 1 , 0 )