

Композиция поворотов. Правило квазикоммутативности
Введем в рассмотрение понятие сложного поворота. Пусть задан вектор a и тензоры поворота P1 и P2. Повернем вектор a тензором P1 и найдем вектор a′ ≡ P1 · a. Далее вектор a′ повернем тензором P2 и найдем вектор a′′ ≡ P2 · a′. В результате вектор a′′ вычисляется как сложный поворот вектора a
|
a ′′ ≡ P2 · a′ = P2·P1 · a = P · a , P = P2·P1. |
(45) |
Из (45) видно, что при последовательном проведении двух поворотов результирующий поворот выражается через произведение составляющих поворотов. Известно, что в общем случае произведение тензоров не коммутативно
|
P2·P1 ≠ P1·P2. |
(46) |
Это означает, что если произвести повороты в другом порядке, сначала P2 потом P1, то результат будет другой.
Однако не следует абсолютизировать условие (46), так как существует определенное правило квазикоммутативности (т.е. как бы перестановочности) поворотов, играющее очень важную практическую роль. В то же время это правило интуитивно понятно и расширяет поле для фантазии при описании вращения.
Пусть имеется два последовательных поворота P1 = Q(θn) и P2 = Q(φm), тогда
|
Q(φm)·Q(θn) = Q(φm)·Q(θn)·1 = = Q(φm)·Q(θn)·QT(φm)·Q(φm). |
(47) |
Посмотрим на Q(φm)·Q(θn)·QT(φm)
|
Q(φm)·Q(θn)·QT(φm) = = Q(φm)·[nn + cosθ(1 – nn) + sinθn × 1]·QT(φm) = = n′n′ + cosθ(1 – n′n′) + sinθn′ × 1, |
(48) |
где n′ = Q(φm) · n – повернутый вторым поворотом вектор n. В итоге получаем
|
Q(φm)·Q(θn) = Q(θn′)·Q(φm). |
(49) |
То есть результирующий поворот можно осуществить двумя способами. Либо сначала повернуть на угол θ вокруг n, а затем на угол φ вокруг m. Либо сначала на угол φ вокруг m, а затем на угол θ, но уже вокруг другой повернутой оси n′.
Правило
|
Q(φm)·Q(θn)·QT(φm) = Q(θn′), n′ = Q(φm) · n |
(50) |
полезно запомнить для проведения чисто формальных преобразований без привлечения интуиции.
Пример.
Всем известен пример из детства с юлой. В механике этот объект называется волчком Лагранжа (см. рис. 4) и представляет собой осесимметричное тело вращения с одной точкой опоры. Юла одновременно вращается вокруг собственной оси n′, которая в свою очередь вращается вокруг неподвижной вертикали m, проходящей через точку опоры.
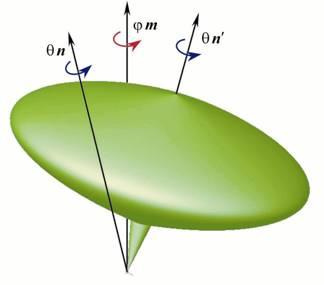
Рис. 4
На первый взгляд кажется, что наиболее удобной формой задания тензора поворота юлы является P = Q(θn′)·Q(φm). Но ведь вектор n′ непостоянный, а это в ряде случаев может существенно усложнить моделирование. Но так как n′ = Q(φm) · n, то, пользуясь правилом квазикоммутативности, мы можем написать P = Q(φm)·Q(θn), где вектор n является константой и определяет направление оси юлы в начальный момент. Второй вариант уже существенно менее затратен для моделирования. Тем не менее, при постановке задач первый способ оказывается более выигрышным.
Вектор поворота
Тензор поворота, записанный в форме P = mm + cosθ(1 – mm) + sinθm × 1, не имеет каких-либо ограничений и может применяться всегда. Тем не менее, интуитивным образом поворота является не тензор второго ранга, а некий вектор θ, называемый вектором поворота
|
θ = θm, | m | = 1. |
(51) |
Его направление совпадает с осью поворота m, а его модуль равен модулю угла поворота θ. В правоориентированной системе отсчета θ > 0 при взгляде с конца m, если поворот происходит против часовой стрелки. Поскольку поворот выражает реальное явление, то наличие нескольких способов его описания возможно только при условии, что способы связаны взаимно однозначным образом. Проще всего показать, что тензор поворота однозначно может быть вычислен по вектору поворота, что следует непосредственно из представления тензора поворота доставляемого теоремой Эйлера
|
P = [(1– cosθ )/θ2]θθ + cosθ1 + [sinθ/θ]θ × 1. |
(52) |
Видно, что последнее выражение нечувствительно к знаку θ. Поэтому величину θ в (52) можно рассматривать как модуль вектора θ, что позволяет без дополнительных соглашений однозначно вычислять тензор поворота по вектору поворота. В теории поворотов доказывается теорема, что представление (52) является ничем иным как тензорной экспонентой тензора θ × 1
|
P = exp(θ × 1). |
(53) |
Вам это ничем не напоминает комплексную экспоненту exp(θi), которая является оператором поворота векторов на комплексной плоскости вокруг оси перпендикулярной к ней? Общность явлений порождает общность описаний, правда со своими особенностями.
Не будем приводить здесь формулы для вычисления вектора поворота по тензору поворота, скажем лишь, что это можно также однозначно сделать. В заключение этого пункта приведем формулу для повернутого вектора a′
|
a′ ≡ P(θ) · a = a + [sinθ/θ]θ × a + [(1– cosθ )/θ2]θ × (θ × a), |
(54) |
использовано равенство θ × (θ × a) = θ(θ · a) – aθ2 = (θθ) · a – aθ2.