

Теорема Эйлера
Приведем пояснения к доказательству базовой теоремы в теории поворотов. Все остальные результаты теории получаются как следствия данной теоремы и при желании могут быть доказаны проницательным читателем самостоятельно.
Теорема Эйлера: произвольный тензор поворота P, отличный от 1, допускает единственное представление
|
P = mm + cosθ(1 – mm) + sinθm × 1, |
(34) |
где единичный вектор m определяет прямую в пространстве, называемую осью поворота; θ называется углом поворота и считается положительным, если поворот при взгляде с конца вектора m происходит против хода часовой стрелки.
Пояснения к доказательству: Покажем, что для тензора поворота P, существует единственный с точностью до множителя (±1) единичный вектор m (он называется неподвижным вектором тензора P), удовлетворяющий уравнению
|
P · m = m, | m | = 1. |
(35) |
Данное уравнение можно переписать в эквивалентной форме
|
(P – 1) · m = 0, | m | = 1, |
(36) |
т.е. вектор m является решением однородного линейного уравнения. Из курса линейной алгебры известно, что однородная система линейных алгебраических уравнений имеет ненулевое решение тогда и только тогда, когда ее определитель равен нулю
|
det(P – 1) = 0. |
(37) |
Покажем, что это так. Для этого выпишем цепочку тождественных преобразований (использовано det(P) = 1)
|
det(P – 1) = det[P·(1 – PT)] = = det(P)det(1 – PT) = det(1 – PT) = = det(1 – P) = – det(P – 1). |
(38) |
Получили, что det(P – 1) = –det(P – 1), а это возможно, если верно равенство (37). Итак, ненулевое решение уравнения (36) существует. Понятно, что если m есть решение (36), то и (–m) есть решение этого уравнения. Однако оба эти вектора определяют одну и ту же прямую, натянутую на вектор m.
Далее методом «от противного» можно показать, что для тензора поворота P, отличного от 1, существует только один неподвижный вектор ± m.
Выберем теперь правую ортонормированную тройку векторов d1 = m, d2, d3. Согласно (32) мы можем записать
|
P = D1d1 + D2d2 + D3d3 = D1m + D2d2 + D3d3, |
(39) |
где тройка D1, D2, D3 также является правой ортонормированной. Умножив равенство (39) скалярно на m справа и учтя (35), получим
|
P · m = D1 = m. |
(40) |
Таким образом, равенство (39) принимает вид
|
P = mm + D2d2 + D3d3. |
(41) |
Здесь все четыре вектора d2, d3, D2, D3 лежат в одной плоскости, т.к. все они ортогональны одному и тому же вектору m. Поэтому D2, D3 можно разложить по векторам d2, d3 (см. рис. 2)
|
D2 = cosθd2 + sinθd3, D3 = – sinθd2 + cosθd3. |
(42) |
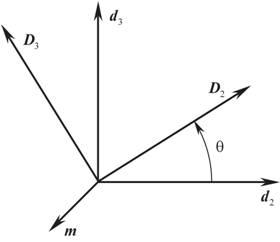
Рис. 2
Подставляя эти разложения в (41) и проводя элементарные преобразования, получаем
|
P = mm + (cosθd2 + sinθd3)d2 + (–sinθd2 + cosθd3)d3 = = mm + cosθ(d2d2 + d3d3) + sinθ(d3d2 – d2d3) = = mm + cosθ(d1d1 + d2d2 + d3d3 – mm) + sinθm × (d1d1 + d2d2 + d3d3) = = mm + cosθ(1 – mm) + sinθm × 1 |
(43) |
Последним равенством и заканчивается доказательство теоремы Эйлера. Обратим внимание, что замена m на – m влечет за собой замену θ на – θ. При этом сам тензор P не меняется.
Пример.
Пусть вектор a параллелен оси поворота (лежит на оси поворота), т.е. a = αm, то P · a = a и вектор a не меняется при действии на него тензора P. Пусть a ортогонален оси поворота: a · m = 0. Тогда
|
a′ = P · a = cosθa + sinθm × a. |
(44) |
Этот результат изображен на рис. 3а.
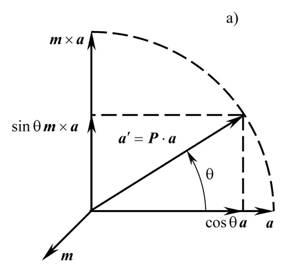
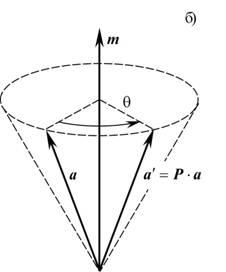
Рис. 3
Видно, что действие тензора поворота на вектор a, ортогональный оси поворота, сводится к повороту на угол θ вокруг m. Если θ > 0, то поворот производится против часовой стрелки при взгляде с конца m. Поворот произвольного вектора a показан на рис. 3б, при этом проекция вектора a на m сохраняется, а часть вектора a, ортогональная a, поворачивается на угол θ вокруг m.