

§4. Эволюция систем Сложный блок управления.
Для наилучшего достижения цели система всегда должна выполнять свое действие оптимально, выдать свой результат действия в нужном месте и в нужное время. Блок управления системы решает обе задачи – где и когда нужно срабатывать.
Для срабатывания в нужном месте у него должно быть понятие о пространстве и соответствующие сенсоры, поставляющие информацию о ситуции в данном пространстве.
Время выдачи результата действия у простых систем, в свою очередь, включает в себя два периода:
время, затраченное на принятие решения (от момента появления внешнего воздействия до момента активации СФЕ)
время, затраченное на срабатываение СФЕ (от момента начала активации СФЕ до момента получения результата действия).
Время, затраченное на принятие решения, зависит от длительности циклов работы системы, и это было рассмотрено выше.
Время, затраченное на срабатываение СФЕ, зависит от свойств самих СФЕ, таких как, например, скорость биохимических реакций в живых клетках, или скорость сокращения саркомера в мышечных клетках, что в немалой степени зависит от скорости расхода энергии этими СФЕ, и от скорости восстановления энергетического потенциала после срабатывания этих СФЕ. Эти скорости в основном являются характеристиками, присущими самим СФЕ, но также определяются мервисными системами, которые обслуживают эти СФЕ. Они также могут управляться блоком управления. Метаболическая, гормональная, простогландиновая и вегетативная нервная регуляция в живом организма призвана как раз для этой цели – в какой-то степени менять скорости биохимических реакций в клетках тканей и условия доставки энергоносителей путём регуляции (сервисных) систем дыхания и кровообращения.
Но понятие «в нужное время» означает не только время срабатывания в ответ на внешнее воздействие. Во многих случаях необходимо срабатывать раньше внешнего воздействия. Однако система с простым блоком управления начинает срабатывать лишь после появления внешнего воздействия. Для живых систем это очень большой (катастрофический) недостаток, поскольку если уже есть воздействие на какой-либо организм, то, возможно, его уже начали кушать. Будет лучше, если система начнёт действовать ещё до того, как это внешнее воздействие начнётся. Если внешняя ситуация угрожает появлением опасного воздействия, то оптимальные действия системы могут предохранить её от него. А для этого нужно знать состояние внешней ситуации, уметь её увидеть, оценить и знать, какие действия необходимо сделать в определённых случаях. Т.е., нужно осуществлять управление по упреждению получения реального результата действия перед внешним воздействием. Для выполнения этих действий он должен содержать специальные элементы, которые могут это делать и которых у него нет.
Простой блок управления может осуществлять управление только по рассогласованию (расхождению) реального результата действия с заданным, потому что система с простым блоком управления не может «знать» ничего о внешней ситуации до того момента, пока эта ситуация не начнёт воздействовать на систему. Знание внешней ситуации для простого блока управления недоступно. Поэтому простой блок управления всегда начинает срабатывать с запаздыванием. Иногда может быть слишком поздно управлять. Если не знать внешней ситуации, то система (живой организм) не сможет сделать прогноз ситуации и не сможет поймать жертву или предупредить встречу с хищником. Таким образом, простой блок управления не может принимать решения о времени и месте срабатывания.
Для этого блоку управления нужен специальный анализатор, который может определять и анализировать внешнюю ситуацию и, в зависимости от различных внешних или внутренних условий, может вырабатывать решение о своих действиях. У этого анализатора должно быть понятие о времени и пространстве, в котором разыгрывается определённая ситуация, а также соответствующие информаторы (сенсоры с линиями связи между ними и этим специальным анализатором), которые дают информацию о внешней ситуации. У анализатора-информатора ничего этого нет.
Когда охотник стреляет в летящую утку, он стреляет не прямо в неё, а стреляет с упреждением, потому что знает, что пока пуля долетит до утки, она (утка) за это время переместится вперёд. Как система для поражения утки, он должен видеть всю ситуацию на расстоянии, он должен правильно оценить её, сделать прогноз, имеет ли смысл стрелять, и только на основе такого анализа он должен действовать, т.е., стрелять в утку. Он не может ожидать, пока утка коснётся его (чтобы сработал его информатор «Х») и тогда он мог бы в неё выстрелить. Для этого он должен сначала выделить утку как нужный объект на фоне других ненужных объектов, затем измерить расстояние до утки, пускай даже и «на глаз». Он делает это с помощью своего специального анализатора (зрительного), который не является сенсором «Х» или «У», а является дополнительным сенсором «С» (дополнительные специальные дистанционные рецепторы с афферентными путями). Такими рецепторами могут быть любые рецепторы, которые могут получать информацию на расстоянии – хемо-, тепло- фоторецепторы и т.д. Зрительный анализатор охотника включает в себя фоточувствительные палочки и колбочки в глазу (фоторецепторы), зрительные нервы и различные мозговые структуры. Он должен распознать все окружающие предметы, классифицировать их и на их фоне выделить и определить местоположение утки (оценка ситуации). Кроме того с помощью реципрокной иннервации он должен так расположить своё тело, чтобы ружьё было направлено точно в то место впереди утки (упреждение), чтобы выполнить свою цель – попасть в утку. Всё это он делает с помощью своего дополнительного анализатора, который является анализатором-классификатором.
Простой блок управления систем с ООС, представленный на рис. 8, такого дополнительного анализатора-классификатора не содержит. Потому он и называется простым. У него есть только анализатор-информатор, который чувствует с помощью сенсора «Х» внешнее воздействие только тогда, когда это воздействие уже началось, измеряет свой результат действия с помощью ООС (сенсора «У») лишь тогда, когда этот результат уже появился, и анализирует получаемую информацию уже после того, как был выдан результат действия, потому что для срабатывания ООС требуется время.
Кроме того, анализатор-информатор содержит только «базу данных», в которой в явной или неявной форме «записана» таблица должных значений контролируемых параметров (данные), которые нужно сравнивать с данными измерений внешнего воздействия и результатов действия. На основе этих сравнений он вырабатывает решения. Его алгоритм управления основан только на сравнении данных измерений, проводимых рецепторами «Х» и «У», с «базой данных». Если, рассогласование равно «М», то нужно сделать, например, меньше действия, если он равен «N», то больше действия. Простой блок управления не может менять решения об изменении уровня контролируемого параметра, времени включения или глубины ООС, потому что у него нет соответствующей информации. Для выполнения этих действий он должен содержать специальные элементы, которые могут дать ему эту информацию.
Что же ему нужно для этого? Чтобы принять решение, данный блок должен «знать» ситуацию вокруг системы, которая может причинить определённое внешнее воздействие. Для этого прежде всего он должен «видеть» её, т.е., иметь для этого сенсоры, которые могут получать информацию на расстоянии и без прямого контакта (дистанционный информатор «С»).
Кроме того он должен содержать специальный анализатор-классификатор, который может классифицировать внешнее окружение и выделять в нём не все объекты и ситуации, а лишь те, которые могут повлиять на выполнение его целей. Кроме того, в нём должны быть понятия о пространстве и времени.
Игра рыбьих косяков и даже дельфиньих стай в окрестностях плывущего боевого крабля не может повлять на его движение в целевое место назначения. Но «игра» вражеской подводной лодки в его окрестностях может очень существенно повлиять на выполнение его цели. Боевой корабль должен уметь видеть всё его окружение, выделить из всех возможных ситуаций, которые могут быть исходя из внешней ситуации, только те, которые могут создать такие внешние воздействия на него, которые могут помешать выполнению его цели. А для этого он должен «знать» возможные варианты ситуаций, которые могут повлиять на выполнение цели данной системы. Для этого он должен иметь «базу знаний», в которой содержится описание всех тех ситуаций, которые могут оказать влияние на выполнение цели. Если в его «базе знаний» нет описания определённых объектов или ситуаций, то он не сможет распознать (классифицировать) объект или ситуацию и не сможет принять верное решение.
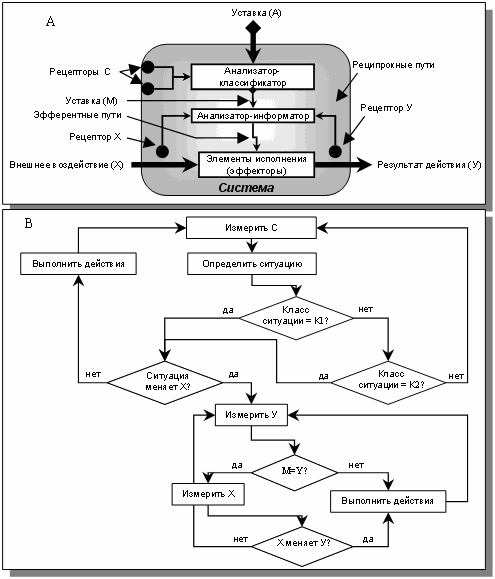
Рис. 23. Сложный блок управления (А) и алгоритм его работы (В) .
В «базе знаний» должна сохраняться информация не о параметрах внешнего воздействия, которые хранятся в «базе данных», а о ситуациях вокруг (вне) системы, которые могут привести к специфическому внешнему воздействию. «База знаний» может быть внедрена в блок управления в момент его «рождения» или внесена позже вместе с уставкой, причём внедряется в данный блок внешними системами по отношению к данной системе. Если в его «базе знаний» нет описания данной ситуации, он не сможет её распознать и классифицировать. «База знаний» содержит описание различных ситуаций и значимость этих ситуаций для системы. Зная значимость реальной ситуации для достижения цели система сможет сделать прогноз и принять решение о своих действиях в зависимости от прогноза.
Кроме «базы знаний» у него также должна быть и «база решений» – набор готовых решений, принимаемых блоком управления в зависимости от ситуации и от прогноза. (уставные решения, инструкции), в которой хранятся соответствующие решениях, которые необходимо принимать в соответствующих ситуациях. Если у него нет готовых решений на внешнюю ситуацию, он не может выполнить свою цель. Определив ситуацию и выработав решение он задаёт уставку (уставка «М» на рис. 23) для анализатора-информатора, который активирует стимулятор соответствующим образом.
Таким образом, блок управления усложняется за счёт включения в его состав информатора «С» и анализатора-классификатора, содержащего «базу знаний» и «базу решений» (рис. 23). Потому такие блоки управления называются сложными. Чем сложнее блок принятия решений, тем точнее может быть выбрано решение.
Следовательно, сложный блок управления включает в себя и анализатор-информатор, который имеет «базу данных», и анализатор-классификатор, который имеет «базу знаний» и «базу решений».
Не любая живая клетка обладает анализатором-классификатором. В классификации живого мира есть две крупнейшие группы – мир растений и мир животных. Растения, как и многие другие субъекты живого мира, такие как кораллы и бактерии, не обладают дистанционными сенсорами, хотя, в некоторых случаях, может создаться впечатление, что всё же у растений такие сенсоры есть. Например, подсолнечник поворачивает свои головки в сторону солнца, как-будто бы у него есть фототаксис. Но он поворачивает головку фактически не в сторону света, а в ту сторону, где больше нагревается его тело, а тепло идёт со стороны света. Тепло ощущается локально самим телом подсолнечника. Специальных инфракрасных сенсоров у него нет. Процесс же фотосинтеза не является процессом фототаксиса.
Поэтому растения являются системами с простым блоком управления. И хотя есть очень сложно устроенные растения, способные даже питаться субъектами животного мира, всё равно их блок управления является простым, реагирующим только на прямой контакт. Например, росянка питается насекомыми, она может заманить их к себе, приклеить к своему наружному желудку и даже сократить его створки. Она хищник и в этом она похожа на волка, акулу или медузу. Она может сделать много действий, подобно животному, но всё это она может делать только лишь после того, как насекомое сядет на неё. Росянка не может гоняться за своими жертвами, потому что она их не видит (нет дистанционных сенсоров). Что бы ни село на неё, даже если это будет маленький камешек, она проделает все необходимые действия и попытается переварить его, потому что у неё нет анализатора-классификатора. Поэтому росянка растение, а не животное.
Клетки животных, включая одноклеточных, типа амёбы или инфузории, являются уже системами с сложными блоками управления, потому что обладают как минимум одним из пространственных анализаторов – хемотаксисом. Наличием дистанционных сенсоров животная клетка отличается от любых объектов растительного мира, у которых таких сенсоров нет. Поэтому блок управления является определителем, к какому миру принадлежит данный живой объект. Медуза не является водорослью, а является животным, потому что у неё есть хемотаксис. Дистанционный анализатор даёт представление о пространстве, в котором нужно передвигаться. Поэтому растения стоят на месте, а животные двигаются в пространстве.
Простой блок управления, включающий в себя только анализатор-информатор, является определителем мира минералов и растений. В чём различие между минеральным и растительным мирами, мы увидим ниже. Сложный блок управления, включающий в себя анализатор-классификатор, является уже определителем мира животных.
Амёба является таким же охотником, как волк, акула или человек. Она питается инфузориями. Чтобы поймать инфузорию, она должна знать, где та находится и должна уметь двигаться. Она не может видеть свою жертву на расстоянии, но она может её почувствовать химическими органами чувств и стремиться к ней для захвата, у неё есть хемотаксис, вероятно первый из дистанционных сенсорных механизмов. Но кроме хемотаксиса у амёбы также должно быть понятие о пространстве, пусть даже и примитивное, в котором она существует и в котором она должна координированно и целенаправлено двигаться, чтобы поймать инфузорию. Кроме того, она должна уметь выделить инфузорию от других объектов, которые могут её встретиться на пути. Её анализатор-классификатор намного проще, чем, например, у волка, или акулы, потому что у неё нет зрения и слуха и вообще нервных структур, но он может классифицировать внешнюю ситуацию. У неё есть уже сложный блок управления, включающий в себя информатор «С», поэтому амёба не растение, а животное.
Как блоки управления могут быть любой степени сложности, так и рефлексы могут быть любой степени сложности – от простейших аксон-рефлексов, до рефлексов, включающих в себя работу коры головного мозга (инстинкты и условные рефлексы). Число рефлексов живого организма огромно, для каждой системы организма существуют собственные рефлексы. Более того, организм не только сложный сам по себе, но в силу своей сложности он имеет возможность строить дополнительные, временные системы, необходимые на данный момент для какого-либо специфического конкретного случая.
Например, система плача является временной системой, которую организм строит на короткий промежуток времени. Блок управления системы плача является примером сложного блока управления. Цель плача – продемонстрировать свои страдания и вызвать жалость к себе. Эта система включает в себя в качестве составных исполнительных элементов другие системы (подсистемы), достаточно удалённые друг от друга как в пространстве, так и в функциональном отношении (слёзные железы, дыхательные мышцы, альвеолы и бронхи лёгких, голосовые связки, мимические мышцы и т.д.).
Сначала определяется внешняя ситуация и в случае необходимости по определённой программе начинает срабатывать рефлекс плача (сложный рефлекс, инстинкт), который включает в себя управление подачей голоса определённого тембра (управление дыхательными мышцами и голосовых связок), всхлипывания (серия прерывистых вздохов), слёзовыделением, определённой мимикой и т.д.
Все эти удалённые элементы объединяются сложным блоком управления в единую систему, в систему плача, с очень конкретной и специфической целью продемонстрировать свои страдания другой системе. Рефлекс плача может быть реализован на всех уровнях нервной системы, начиная от высших центральных мозговых структур, включая вегетативную нервную систему, подкорку и вплоть до коры головного мозга. Но мы рассматриваем только детский плач, который реализован в нервных структурах не выше подкорки (инстинктивный плач). После того, как цель была достигнута (страдания были однозначно продемонстрированы, а была ли вызвана жалость, это выяснится потом) рефлекс прекращается, данный сложный блок управления исчезает и система распадается на свои составные части, которые продолжают функционировать уже в составе других систем организма. Система же плача исчезает (рассыпается).
Откуда блок управления (на уровне подкорки) знает что сейчас нужно плакать, а в другой момент не нужно? Для этого он распознаёт ситуацию (выделяет её и классифицирует). Этим занимается анализатор-классификатор. Его «база знаний» заложена в подкорку с рождения (инстинкты).
Такие действия простой блок управления выполнить не может. Все действия систем, управляемых простейшими и простыми блоками управления, будут автоматическими. Биологическим аналогом простейшего блока управления являются аксон-рефлексы, работающие по закону «всё или ничего». Простого – безусловные рефлексы, когда в ответ на определённое внешнее воздействие будет определённая автоматическая, но градуированная реакция. Простой блок управления будет лучше адаптировать действия системы, чем простейший, потому что он учитывает не только само внешнее воздействие, но и результат действия системы, который появился в ответ на это внешнее воздействие. Но он не может распознавать ситуации.
Такие действия может выполнить сложный блок управления. Он реагирует не на внешнее воздействие, а на определённую внешнюю ситуацию, которая может дать определённое внешнее воздействие. Биологическим аналогом сложного блока управления являются сложные рефлексы, или инстинкты. Во время внутриутробного развития в мозг плода «внедряются знания» («база знаний») о возможных ситуациях. Объём этих знаний огромный. Цыплёнок сразу может бегать, едва он вылупится из яйца. Крокодил, акула или змея сразу после рождения становятся хищниками, т.е., знают и умеют делать всё, что требуется для этого. Это говорит о том, что у них есть достаточная для этого врождённая «база знаний» и «база решений». В этих случаях мы говорим, что у животного есть инстинкты.
Таким образом, система со сложным блоком управления является объектом, который может реагировать на определённую внешнюю ситуацию, в которой может быть это воздействие. Но он может реагировать только на фиксированное (конечное) число внешних ситуций, описание которых содержится в его «базе знаний» и у него есть конечное число решений на эти ситуации, описание которых содержится в его «базе решений». Для определения внешней ситуации он имеет информатор «С» и анализатор-классификатор.
В остальном он похож на систему с простым блоком управления. Он также может реагировать на определённое внешнее воздействие и его реакция обусловлена типом и числом его СФЕ. Результат действия системы также градуированный. Число градаций определяется числом исполнительных СФЕ в системе. Он также имеет анализатор-информатор с «базой данных», ППС с (информатор «Х») и ООС (информатор «У»), которые через стимулятор (эфферентные пути) управляют системой.
В неживом мире аналогов систем со сложным блоком управления нет. Биологическим аналогом систем со сложным блоком управления являются все животные, от отдельных клеток до животных с достаточно развитой нервной системой, включающей головной мозг и дистанционные органы чувств, такие как зрение, слух, обоняние, но у которых невозможно выработать рефлексы на новые ситуации, например, насекомые.
Аналогом информатора «С» являются все «дистанционные» рецепторы – зрение (или их светочувствительные аналоги у более низко развитых животных), слух и обоняние.
Аналогом анализатора-классификатора являются, например, зрительный, слуховой, вкусовой и обонятельный анализаторы, расположенные в подкорке. Зрительный, слуховой, вкусовой и обонятельный анализаторы расположенные в коре головного мозга относятся уже к анализаторам-корреляторам (см. ниже).
Самообучающийся блок управления.
Никаких мозгов не хватит, чтобы вместить огромные «базы знаний» о всех возможных состояниях всего окружающего мира. Поэтому одной из причин, почему каждый вид животных занимает соответствующую биосферную нишу, является необходимость ограничить объём «базы знаний». Антилопа знает то, что не знает тюлень, и наоборот. В каждой отдельной экологической нише количество возможных ситуаций намного меньше, чем во всех экологических нишах вместе взятых. Поэтому и объём необходимых знаний в отдельных экологических нишах требуется относительно небольшой.
Однако даже если каким-то образом внедрить всю имеющуюся на сегодняшний день информацию о всех ситуациях, которые уже возникали в мире, это всё равно не поможет, потому что мир постоянно меняется и многие ситуации ещё не возникали. «База знаний» в принципе не может иметь информацию о том, чего ещё не было в мире. Естесственно, что и «база решений» не может содержать всех возможных вариантов решений. «Генетические знания» содержат только то, что пережили предки животных. Они принципиально не могут иметь знаний о том, что ещё будет. Как только возникнет новая ситуация, система не сможет её распознать, классифицировать и принять решение. Даже если эта ситуация будет многократно повторяться, если система не может самообучаться, она каждый раз не сможет правильно распознать ситуацию, потому что таких ситуаций у неё в «базе знаний» нет.
Муравей бежит по штакетнику, поднимаясь и спускаясь, и не может догадаться, что можно спокойно обходить штакетник. Миллионы лет назад, когда формировалась его генетически заложенная «база знаний», штакетников не было. Если на паутину опустить нитку, паук оставит эту паутину и сплетёт новую, потому что он не знаком с такой ситуацией, не знает и не может научиться тому, что можно сделать дырку в паутине, чтобы нитка не мешала. Всё это потому, что насекомые как класс животных не способны что-либо выучить. Они могут быть прекрасными строителями, поражающими нас своими сложными и прекрасными паутинами, гнёздами и прочими творениями их труда. Но они могут строить только на основе врождённых знаний. У них есть готовая «база знаний» (инстинкты), но у них нет мозговых структур (элементов блока управления), способных дополнять собственную «базу знаний» новыми жизненными ситуациями. У них не возникает рефлексов на новые раздражители.
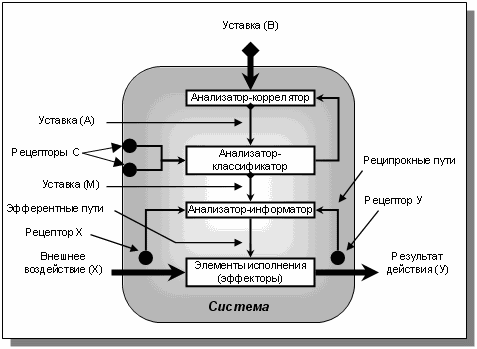
Рис. 24. Самообучающийся блок управления. Его основным отличием от несамо-обучающихся систем является анализатор-коррелятор различной степени сложности.
Чтобы уметь распознавать и классифицировать новые ситуации, блок управления должен уметь заносить описания этих ситуаций в свою «базу знаний». Но сначала он должен уметь распознать, что это вообще новая ситуация, например, сравнивая её с тем, что уже есть в «базе знаний». Затем он должен выявить значимость (ценностную стоимость) именно этой ситуации для достижения собственной цели. Если нет никакой корреляции между новой ситуацией и выполнением цели системы, нет смысла запоминать эту ситуацию, иначе мозги будут «забиты мусором». Выделяя и классифицируя внешние ситуации (распознавая их) и находя взаимосвязь (корреляцию) между этими ситуациями, принятыми решениями и достижением цели системы блок управления учится вырабатывать соответствующие решения. Таким образом самообучающийся блок принятия решений постоянно дополняет свою «базу знаний» и «базу решений».
Но ничего само собой не происходит по закону сохранения. Для того, чтобы блок управления мог делать все выше названные действия, он должен иметь соответствующие элементы. Основным таким элементом является анализатор-коррелятор (рис. 24). Он является основой, на которой может появиться рефлекс на новый разражитель или новую ситуацию.
Его задача – выявить новую ситуацию, распознать, что она новая, выявить степень корреляции между этой ситуацией и его собственной целью. Если нет корреляции между этой новой ситуацией и выполнением собственной цели системой, нет смысла запоминать и зря загружать свою ограниченную память «базы данных».
Если степень корреляции высокая, то нужно занести эту ситуацию в свою «базу знаний» и выработать решение о выборе собственных действий для достижения собственной цели, после чего определить, есть ли корреляция между принятым решением и достижением цели.
Если нет корреляции между принятым решением и выполнением собственной цели системой, то надо найти другое решение и снова определить корреляцию между принятым решением и выполнением цели. И так повторять до тех пор, пока не появится достаточно высокая корреляция между принятым решением и выполнением цели. Только после этого занести найденное правильное решение в свою «базу решений».
В этом суть самообучения. Только анализатор-коррелятор делает возможным процесс самообучения. Самообучение системы – это, по сути, возникновение рефлексов на новые раздражители или ситуации. Следовательно, они возможны лишь тогда, когда в блоке управления есть анализатор-коррелятор.
Биологическим аналогом анализатора-коррелятора является кора головного мозга. Наличие коры определяет возможность появления рефлексов на новые ситуации. Кора головного мозга есть только у животных, уже находящихся на достаточно высокой ступени своего развития.
Небиологические аналоги систем с таким самообучающимся блоком управления нам неизвестны. Компьютерные самообучающиеся системы построены человеком и сам процесс самообучения всегда в конечном итоге включает кору головного мозга человека. Есть различные так называемые «интеллектуальные» системы, но полноценным интеллектом пока обладает лишь человек.
Уточним, что, вообще говоря, нет самообучающихся систем, а есть их самообучающиеся блоки управления, потому что исполнительные элементы не могут ничему обучаться. Могут быть системы с простыми элементами исполнения, но с блоками управления различной сложности. Любое взрывное устройство содержит только один исполнительный элемент (одна составная СФЕ – заряд взрывчатки) и блок управления, который взрывает заряд взрывчатки в нужное время. Блок управления может быть как простейшим, срабатывающим от прикосновения, так и чрезвычайно сложным, включающим в себя, например, технические устройства дистанционного управления и наблюдателя со стороны (человека с его мозгом) для выработки решения о времени взрыва. Во всех случаях заряд взрывчатки один и тот же, простейший, по сути – СФЕ, а системы управления могут быть совершенно различны по степени своей сложности. Взрывчатка также может быть любой степени сложности. Например, атомная бомба включает в себя как обычные взрывчатые материалы типа тротила, так и ядерный заряд типа плутония. Но ни тротил, ни плутоний, ни тротил с плутонием вместе никогда не смогут ничему обучиться. Тем не менее, название «самообучающиеся системы», по-видимому, уже прижилось.
Для того чтобы блок управления мог быть самообучающимся, он должен содержать три типа анализаторов:
анализатор-информатор с «базой данных» (ПУС и ООС, благодаря которым система может выделить и измерить внешние сигналы и измерить собственный результат действия)
анализатор-классификатор с «базой знаний» и «базой решений» (который может классифицировать внешнюю ситуацию на основе информации с информатора «С»)
анализатор-коррелятор (который может выявить взаимосвязь – корреляцию, между различными внешними ситуациями и результатми действий данной системы и передавать полученные знания и решения анализатору классификатору для занесения в «базу знаний» и «базу решений»)
Таким образом, система с самообучающимся блоком управления является объектом, который может научиться распознавать новые внешние воздействия и ситуации, в которой может быть это воздействие. Для этого у него есть анализатор-коррелятор.
В остальном он похож на систему с сложным блоком управления. Он может реагировать на определённое внешнее воздействие и на внешнюю ситуацию, и его реакция обусловлена типом и числом его СФЕ. Результат действия системы также градуированный. Число градаций определяется числом исполнительных СФЕ в системе. Он также имеет анализатор-классификатор с «базой знаний» и «базой решений», анализатор-информатор с «базой данных», ППС с (информатор «Х») и ООС (информатор «У»), которые через стимулятор (эфферентные пути) управляют системой.
В неживом мире аналогов систем с самообучающимся блоком управления нет. Биологическим аналогом систем со сложным блоком управления являются все животные с достаточно развитой нервной системой, у которых возможно выработать рефлексы на новые ситуации (не путать с условными рефлексами). Аналогом анализатора-коррелятора является только кора головного мозга.
Сигнальные системы.
Появление в блоке управления анализатора-коррелятора дало ему возможность увеличивать свой личный опыт путём самообучения и постоянно пополнять свою «базу знаний» и «базу решений». Но он не может передать свой опыт другим системам. Личный опыт ограничен, как бы личность не старалась увеличить его. В любом случае коллективный опыт намного больше личного. Для того, чтобы одна личность могла передать свой опыт другой личности, необходимо отдельное устройство, с помощью которого можно «перекачивать» информацию из одной «базы знаний» в другую.
Например, антилопа знает, что гепард очень опасен, потому что ест антилоп, и хочет передать это знание своему малышу. Каким образом это можно сделать? Например, она может смоделировать ситуацию, разыграв спектакль, в котором все действующие лица – реальные объекты. Т.е., она должна подставить себя гепарду перед глазами этого малыша, чтобы он получил свой личный опыт на примере своей мамы. Детёныш увидит ситуацию, у него выработается рефлекс на новую ситуацию и он будет остерегаться гепардов. Естественно, это абсурдный путь, потому что он не решает проблемы выживаемости. Вместо двух антилоп всё равно остаётся одна.
Что же в принципе можно сделать? Каким образом одна само-обучающаяся система может передавать свой личный опыт другой самообучающейся системе? Нужно смоделировать ситуацию, разыграв спектакль, в котором все действующие лица – абстрактные объекты. Заменить реальные объекты другими, которым присваивается условная связь между ними и реальными объектами (абстрагирование объектов). Такими абстрактными объектами являются условные сигналы. Системы «договариваются» (ставят условие), что если появится такой-то сигнал, это будет говорить о том-то. Выработка условного рефлекса и есть замена реального воздействия абстрактным воздействием. Это есть так называемая первая сигнальная система, которая основана на условных рефлексах.
Появление гепарда вызывает появление панического голоса у антилопы. Значит появление такого голоса связано с появлением гепарда и такой голос становиться абстрактным заменителем самого гепарда, условным сигналом. Абстрактным заменителем опасности может быть любой двигательный сигнал: поднимание или опускание хвоста, особые прыжки, издавание особых звуков, мимика и т.д. Эти двигательные сигналы действуют на системы в стаде и по этому сигналу они могут знать, что рядом есть опасность. Т.е., произошла замена реального внешнего воздействия чем-то отвлеченным (абстрактным), что с этим объектом связано. Произошло абстрагирование реального действия его символом, голосовым, двигательным и т.д. Для такого абстрагирования в блоке управления необходимо дополнительное устройство – анализатор-абстрактор, в котором должна быть своя «база абстракций» («база условных сигналов»).
«База абстракций» содержит набор описания определённых сигналов, которые принимаются как условные ситуации и которые соответствуют другим определённым ситуациям. Условным сигналом является появление какого-либо объекта или движения (ситуационный сигнал), которые обычно не появляются в обычной рутинной ситуации. Само по себе появление условного сигнала никак не влияет на достижение своих целей системами. Например, если поднять и распушить хвост, это никак не влияет ни на поглощение пищи, ни на бег и т.д. Но его появление связано с появлением такой ситуации, которая может повлиять на достижение своих целей системами. Если уметь абстрагироваться от конкретных ситуаций, то даже не видя гепарда, но увидя поднятые хвосты, можно догадаться, что гепард поблизости.
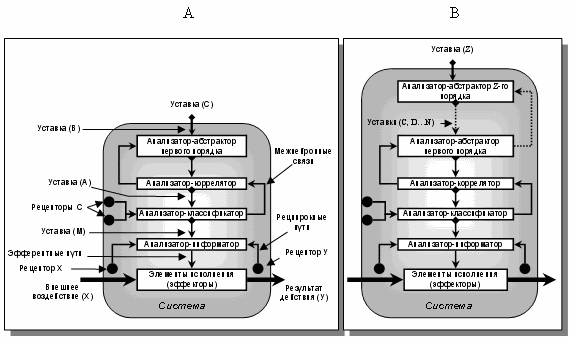
Рис. 25. Системы с блоками управления первой (А) и второй (В) сигнальной системы.
Абстрагирование реального внешнего воздействия голосовым или двигательным символом делает первая сигнальная система (рис. 25А). Она дополняет анализатор-коррелятор и действует подобно ему, т.е., является самообучающейся. «База абстракций» вновь рождённой системы пустая, в отличие от «базы знаний». Она заполняется в течение жизни системы за счёт возможности самообучения и вновь полученые знания затем перекачиваются в «базу знаний».
Иногда поведение животных как-будто указывает на их возможность передавать информацию от одного к другому ещё до появления соответствующей ситуации. Например, одни львы отправляются в засаду, другие начинают гнать антилоп. Т.е., они как-будто предвидят ситуацию. Но они знают о возможностях засады только из своего личного опыта. У них нет других средств о передаче такой информации своему сменному поколению, кроме как показать им эту ситуацию.
Здесь открывается новый путь для развития систем (вернее, их блоков управления), путь социализации – объединения животных в группы для увеличения собственного опыта, потому что условные сигналы предназначены только для передачи информации от одной системы (субъекта) к другой. Вероятно, есть несколько уровней такого анализатора-абстрактора и от числа этих уровней зависит степень абстракции, до которой может дойти тот или иной субъект. Абстрагировать можно внешние воздействия, внешние ситуации, реальные объекты и даже сам процесс самообучения. Но в любом случае нужно уметь абстрагировать и понимать абстрактные символы. Этим занимается анализатор-абстрактор.
Абстрагирование реального внешнего воздействия, объекта или ситуации ситуационным условным сигналом (позой, звуком, движением, каким-либо действием) может делать первая сигнальная система. Абстрагирование реального внешнего воздействия, объекта или ситуации знаковым условным сигналом (символом) может делать только вторая сигнальная система. Блок управления с второй сигнальной системой – это интеллектуальный блок управления. Интеллект зависит от наличия и степени развитости (числа уровней) анализатора-абстрактора (рис. 25В).
У животных вторая сигнальная система очень слабо развита или не развита вообще. Если лошадь шарахается от кнута, то в данном случае срабатывает даже не первая сигнальная система, а рефлекс на новую ситуацию, которую лошадь выучила при своём знакомстве с кнутом. Если её грубо окрикнуть, то она даже без показа ей кнута сделает необходимые выводы. Здесь уже срабатывает первая сигнальная система. Но если ей показать надпись, в которой написано, что её сейчас изобьют, она никак не среагирует, потому что не может и никогда не сможет читать: у неё нет второй сигнальной системы.
Есть животные, которые как-будто способны говорить и понимать слова, написанные символы и даже умеющие совершать простейшие арифметические операции. Но у них вторая сигнальная система развита очень слабо и в прямом смысле находится в зачаточном состоянии. Когда дрессировщик демонстрирует, как собака считает до пяти, он немного блефует, так как собака на самом деле ловит от него определённые двигательные сигналы. Т.е., у неё работает не вторая, а первая сигнальная система.
Наибольшей степени развития вторая сигнальная система достигла только у человека. Она у нас настолько развита, что стало возможным полностью передать нам всю необходимую информацию о наших дальнейших действиях в ближайшем или даже достаточно отдалённом будущем только с помощью знаковых символов. Мы можем читать книгу, в которой изображены лишь какие-то закорючки, но перед нами раскрываются настолько полноценные и красочные картины, что мы забываем об окружающем мире, захваченные интересным чтивом. Наверняка ваша собака удивляется, что это её хозяин подолгу смотрит в странный предмет (в книгу) и не двигается, не бегает и не издаёт звуков. И даже если вы попытаетесь объяснить ей, что такое книга, она всё равно не поймёт, потому что она пока ещё не «созрела», у неё нет второй сигнальной системы.
Таким образом, система с самообучающимся блоком управления, который содержит первую сигнальную систему, является объектом, который может абстрагировать внешние воздействия и ситуации абстрактным ситуационным условным сигналом. Для этого у него есть анализатор-абстрактор первого порядка. Но он может сообщить о наличии такого действия или ситуации только в момент их возникновения. Он может передать свой опыт другим системам только с помощью ситуационным условныцм сигналом, возможности которого ограничены. У такого блока есть «база знаний» и «база абстракций», которую он накапливает в своём мозгу в течение своей жизни. В сообществах систем с первой сигнальной системой возможно накопление личных знаний, но невозможно накопление общественных знаний, потому что эти знания накапливаются только в блоке управления (в головном мозгу), возможности которого ограничены.
Система, у которой есть самообучающийся блок управления, содержащий вторую сигнальную систему, является объектом, который может абстрагировать внешние воздействия и ситуации абстрактным знаковым условным сигналом. Для этого у него есть анализатор-абстрактор Z-го порядка. Он может передать свой опыт другим системам путём передачи им информации в виде условных знаков. Такие блоки накапливают «базу знаний» вне своего головного мозга в виде письма благодаря развитой «базе абстракций». Это даёт возможность избавить зависимость накопления знаний от времени жизни отдельного субъекта. В сообществах систем с второй сигнальной системой возможно накопление общественных знаний и это усиливает накопление личных знаний.
В остальном блок управления с сигнальными системами похож на самообучающийся блок управления, рассмотренный ранее. Он может реагировать на определённое и научиться реагировать на новое внешнее воздействие и на внешнюю ситуацию, и его реакция обусловлена типом и числом его СФЕ. Результат действия системы также градуированный. Число градаций определяется числом исполнительных СФЕ в системе. Он также имеет, анализатор-коррелятор, анализатор-классификатор с «базой знаний» и «базой решений», анализатор-информатор с «базой данных», ППС с (информатор «Х») и ООС (информатор «У»), которые через стимулятор (эфферентные пути) управляют системой.
В неживом мире нет аналогов систем с блоком управления с сигнальными системами. Биологическим аналогом систем с блоком управления, который содержит первую сигнальную систему, являются все животные с достаточно развитой нервной системой, у которых можно выработать условные рефлексы. Как правило у таких животных уже есть социальные отношения (стаи, стада и прочие социальные группы), потому что сигналы передаются от животного к животному.
Биологическим аналогом систем с блоком управления, содержащим вторую сигнальную систему, является только человек.
Эволюция блоков управления.
Рефлекс (от лат. reflexus — повёрнутый назад, отражённый), реакции организма, вызываемые центральной нервной системой при раздражении рецепторов агентами внутренней или внешней среды; проявляются в возникновении или изменении функциональной деятельности органов и организма в целом. Термин «рефлекс», заимствованный из области физических явлений, подчёркивает, что деятельность нервной системы является «отражённой», осуществляется в ответ на воздействия из внешней или внутренней среды [3].
В этом определении честь иметь рефлексы принадлежит только живым организмам, и то не всем, а только тем, у которых есть нервная система. Но любая реакция любой системы, даже простейшей – это, по сути, рефлекс. Любая реакция систем и любой рефлекс направлены на выполнение какой-либо определённой цели. Чем сложнее рефлекс, тем лучше выполняется цель системы. Рефлексы могут быть строго локальными, работающими в весьма ограниченной области, например, управляя только одним сфинктером (аксон-рефлекс). Они могут быть также и весьма обширными, генерализованными, каким, например, является рефлекс плача или смеха, могут быть безусловными и условными, вегетативными и двигательными, и любой степени сложности. Любой рефлекс реализуется элементами блока управления соответствующей сложности, и каждый рефлекс предназначен для реализации какой-либо строго определённой специфической программы действий (специфической реакции) для достижения строго определённой цели в ответ на строго определённое внешнее воздействие.
Нет никаких оснований исключать существование внутриклеточных рефлексов, осуществляемых на уровне биохимических реакций или других, неизвестных нам пока механизмов. Мы привыкли связывать слово «рефлекс» с деятельностью нервной системы. Но само значение слова «рефлекс» означает «отражение» в смысле реакции на что-то. Любое срабатывание блока управления есть рефлекс, независимо от того, что срабатывает – биологический объект или неживая конструкция. Поэтому реакции даже неживых систем также являются рефлексами. Исторически сложилось так, что слово «рефлекс» мы всегда применяем в приложении к биологическим объектам, но нигде не написано, что рефлекс обязательно нужно применять только в приложении к функциям нервной системы.
Да, нервная система является одним из наиболее известных элементов различных рефлексов. Но кроме неё есть ещё и гуморальная (гормональная, простогландиновая, метаболическая и т.д.) регуляция, которая также должна включать в себя множество собственных рефлексов. Биохимия клеток включает в себя множество регуляторов. Мы знаем, что продукты химических реакций являются ингибиторами этих реакций. Т.е., по мере нарастания концентрации продуктов реакции ход этой реакции замедляется. Чем не ООС? Отсюда, зная, что блок управления определяет систему, можно выявлять соответствующие системы организма на всех уровнях, от глобальных межтканевых и многоструктурных систем до внутриклеточных и межмолекулярных. Для этого нужно всего лишь выявить какой-либо рефлекс и по нему определить систему, охваченную этим рефлексом. Т.е., выявляя рефлексы можно выявлять системы живого организма.
Рефлексы животных организмов являются полным биологическим аналогом блоков управления. Соответствующие рефлексы осуществляются на уровне соответствующих анализаторов.
Рефлексы, как и блоки управления, могут быть различной степени сложности:
|
Вид рефлекса |
Тип анализатора |
Тип блока управления |
Мир Природы |
|
аксон-рефлекс |
информатор |
простейший |
минеральный, растительный, животный и человека |
|
безусловный рефлекс |
информатор |
простейший и простой |
растительный, животный и человека |
|
сложный рефлекс (инстинкт) |
классификатор |
сложный |
животный и человека |
|
Рефлекс на новый раздражитель |
коррелятор |
самообучающийся |
животный и человека |
|
первая сигнальная система (условный рефлекс) |
абстрактор первого порядка |
самообучающийся |
животный и человека |
|
вторая сигнальная система (условный рефлекс) |
абстрактор Z-го порядка |
интеллектуальный |
человека |
Как видим, у человека есть все виды рефлексов и сигнальных систем. Поэтому человек является вершиной эволюции на Земле. Чем сложнее блок управления, тем больше выбор действий он может сделать, тем лучше система адаптируется к внешней ситуации, тем больше шансов уцелеть. В результате на сегодня человек является доминирующим видом животных (систем) на Земле.
Что нам даёт знание о том, что в состав любой системы входит блок управления? Все виды рефлексотерапии, включая все более или менее пока ещё экзотические виды восточной медицины, такие как иглотерапия или прижигания, основаны на воздействии на вегетативные блоки управления. Но не только для рефлесотерапии важно понятие о блоках управления.
Без учёта наличия блока управления мы не можем лечить болезни, потому что их патогенез включает в себя нарушения или смещения уставки в блоках управления. В то же время сегодняшние принципы фармакологической терапии полностью игнорируют факт наличия в системах организма блоков управления. Например, при артериальной гипертонии (АГ) мы назначаем различные сосудистые релаксаторы, пытась снизить АД у больного. Но в организме больного есть система стабилизации артериального давления (ССАД), блок управления которой по какой-то причине «решил» сохранять повышенное давление (принял новую уставку). Мы можем пытаться снизить его, но ССАД будет пытаться поднять его, поскольку у неё есть своя уставка (своя цель) – создать и сохранить увеличенное АД. За этим следит её блок управления. Поэтому нам не удаётся полностью вылечить АГ, если мы назначаем только сосудистые релаксаторы.
Более того, так как блок управления в организме самообучающийся, он со временем находит пути решения своих проблем. Применяемые препараты становятся привычными и нам приходится менять дозировку или лекарственные препараты. Если же мы найдём причину, по которой система стабилизации «решила» поднять АД, и ликвидировать эту причину, то сумеем внедрить в блок управления новую уставку, и только тогда система стабилизации возможно снизит АД до нормального.
Самоорганизующиеся системы.
Богданов показал, что существует два способа образования систем. По первому способу система возникает как минимум из двух объектов любой природы посредством третьей сущности – связи (синтез, генерация). По второму способу система образуется за счёт распада (деструкции, дегенерации) ранее существующей более сложной системы [6]. Следовательно, систему можно построить (организовать) из новых элементов или перестроить (реорганизовать) за счёт включения в её состав дополнительных элементов, или путём исключения из её состава ненужных элементов.
По-видимому, существует и третий способ реорганизации систем – замена старых или изношенных частей на новые (структурная регенерация), и четвертый способ – изменение связей между внутренними элементами системы (функциональная регенерация).
Генерация (первый способ реорганизации) – это процесс положительной энтропии (от простого к сложному, усложнение систем). Новая система образуется за счёт увеличения состава её элементов. Этот процесс происходит за счёт появления дополнительных связей между элементами и поэтому требует энергии и потока веществ (новых элементов).
Дегенерация (второй способ реорганизации) – это процесс отрицательной энтропии (от сложного к простому, упрощение систем). Новая система образуется за счёт уменьшения состава её элементов. Этот процесс выделяет энергию и элементы из своего состава.
Оба способа используются для создания новых систем с новыми целями. В первом случае получается усложнение систем, во втором – их упрощение или разрушение.
Структурная регенерация (третий способ реорганизации) используется для сохранения и восстановления состава систем. Она используется в виде обмена веществ (см. ниже) у живых систем, но при этом система и её цели не меняются и. Этот процесс требует энергии и потока веществ для восстановления СФЕ.
Функциональная регенерация (четвёртый способ реорганизации) используется для работы самих систем. Сам принцип функционирования систем напоминает процессы генерации и дегенерации. Во время наращивания функций система включает очередные СФЕ, как-будто бы строя новую более мощную систему с большим числом элементов (генерация). Во время снижения мощности функций система выключает очередные СФЕ, опять как-будто бы строя новую систему с меньшим числом элементов (дегенерация). Но это всё обратимые изменения системы, возникающие в ответ на внешнее воздействие, которые осуществляется за счёт изменения состояния её элементов и использования ППС, ООС и эффекторов. При этом состав системы как бы меняется в зависимости от цели. У неё появляются активные и пассивные (резервные) СФЕ. Этот процесс требует энергии и требует потока веществ для восполнения энергии, но не обязательно требует потока веществ для восстановления СФЕ.
Каким образом происходит организация (построение) системы? Кто принимает решение об организации или реорганизации систем? Кто строит блок управления новой или реорганизованной системы? Кто задаёт уставку – задание для системы? Почему петля ООС строится для выполнения именно данного условия? Прежде чем попробуем ответить на эти вопросы, отметим следующее.
Во-первых, необходимо наличие кого-то или чего-то «заинтересованного» в новом качестве результата действия, кто (или что) определит это условие (поставит цель) и построит блок управления.
Этим «заинтересованным» может быть, например, человек, который строит что-то и ему нужны системы с заданными свойствами. Он может построить тот же гвоздь или космический корабль для определённых целей.
«Заинтересованным» может быть также случай в паре с естесственным отбором, когда путём большого количества случайного перебора могут возникнуть соответствующие комбинации элементов и их взаимодействий, наиболее устойчивые в данных условиях внешней среды. Таким образом, внешняя среда ставит условия, а случай строит системы под эти условия. Здесь мы не рассматриваем условия, в которых осуществляется генерация или денерация, и которые связаны с избыточностью или недостатком энергии (с положительной или отрицательной энтропией). Мы рассматриваем только необходимость и целесообразность создания систем.
Чем больше сложность системы, тем больше вариантов перебора должно быть, тем больше времени на это требуется (закон больших чисел). Не зря биологическая эволюция длится многие миллиарды лет.
Но в любом случае любые системы строятся под какие-то определённые цели. Цель – это и есть «заинтерисованность». В виду полного отсутствия желания вступать в теософские споры мы не будем рассматривать телеологические и прочие причины «заинтересованности» и оставим этот вопрос открытым. Отметим лишь, что цель задаётся любым системам извне, будь то случай, человек, естесственный отбор или что-либо иное.
Но мы не можем обойти вниманием следующее очень интересное следствие. Выживаемость является основной и генеральной целью любого живого организма. А поскольку цель задаётся извне, то и выживаемость является чем-то, задаваемым нам извне, и не является чем-то, что исходит из наших внутренних побуждений. Т.е., цель выжить является нашим внутренним побуждением, но кто-то или что-то извне когда-то в нас это внедрил. А до внедрения это не было «нашим».
Во-вторых, для того, чтобы в принципе была возможность построения систем с любым блоком управления, даже простейшим, необходимо наличие таких элементов, качества результатов действия которых принципиально давали бы эту возможность. Это вытекает из закона сохранения и закона причинно-следственных ограничений – ничто само собой не происходит. Эти элементы должны иметь входы внешнего воздействия (обязательно), входы уставки (необязательно для неуправляемых СФЕ) и выходы результата действия (обязательно). Выходы и входы должны иметь возможность взаимодействовать между собой. Эта возможность реализуется комбинацией гомореактивности и гетерореактивности элементов.
Физическая гомореактивность – способность элемента давать такой же вид результата действия, каким является внешнее воздействие (давление → давление, электричество → электричество, и т.д.). При этом характеристики физических параметров не меняются (10 гр →10 гр, 5 mV → 5 mV и т.д.). Гомореактивные элементы являются передатчиками действий.
Физическая гетерореактивность – способность элемента в ответ на внешнее воздействие одного физического рода давать результат действия другого физического рода ( давление → частота электрических импульсов, электрический ток → поворот оси вала, и т.д.). Гетерореактивные элементы являются преобразователями действий.
Элементами с физической гетерореактивностью являются, например, все рецепторы живого организма (преобразуют сигналы измеряемых параметров в пачки нервных импульсов), сенсоры измерительных приборов, рычаги, валы, плоскости и т.д. Т.е., ими могут быть любые материальные вещи окружающего нас мира, удовлетворяющие условию гетерореактивности.
Химические реакции также подпадают под разряд физических, поскольку химические реакции – это перенос электронов с одних атомов на другие. Химия – это особый раздел физики.
Логическая гетерореактивность – способность элемента в ответ на внешнее воздействие одного физического рода давать результат действия того же физического рода ( давление → давление, электрический ток → электрический ток и т.д.), но с другими характеристиками (10 гр → 100 гр, 5 mA → 0.5 mA, 1 Hz → 10 Hz, 5 импульсов → 15 импульсов и т.д.). Усилители, преобразователи кода, логические компоненты электроники – примеры элементов с логической гетерореактивностью.
Нейроны не обладают физической гетерореактивностью, поскольку они могут воспринимать только потенциалы действия и их же генерировать. Но у них есть логическая гетерореактивность, они могут преобразовывать частоту и число импульсов. Они преобразовывают не сам физический параметр, а его характеристики.
Любая система состоит из элементов, исполнительных и управляющих. В то же время любой блок управления любых систем сам состоит из каких-то частей (элементов), следовательно он также попадает под определение систем. Т.е., блок управления и его части сами являются определёнными системами (подсистемами) с их целями, и они имеют собственные исполнительные элементы и локальные блоки управления, управляющие этими исполнительными элементами. Обязательным условием для части из них является их способность к гетерореактивности того или иного рода. Эффект их управляющего действия заключается только в их взаимном расположении. В локальный блок управления вводится уставка (задание условия, цель), и он постоянно следит за тем, чтобы результат действия всегда соответствовал уставке. При этом уставка может задаваться извне другой системой, внешней по отношению к данной, или самообучающийся блок может «решить» сам изменить параметры уставки (но не цель). Следовательно, элементы управления могут быть такими же, как и элементы исполнения. Разница только во взаимном расположении. Директор предприятия такой же человек, как и рядовой инженер.
Все элементы системы, исполнительные и управляющие, построены по определённой схеме, конкретной для каждого конкретного случая (для каждой конкретной цели), но все они должны иметь «выход», откуда выходит результат действия данного элемента и два «входа» – для внешнего воздействия и для входа уставки.
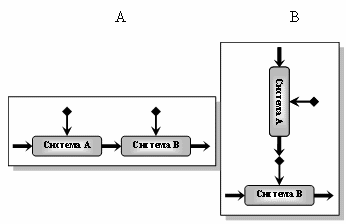
Рис. 26. Некоторые варианты взаимодействия элементов системы.
А – взаимодействие типа выход-вход, обе системы являются исполнительными элементами; В – взаимодействие типа выход-уставка, система «А» как управляющий элемент, а система «В» как исполнительный элемент.
Если выходы каких-либо элементов соединены с входами для внешних воздействий других элементов, такие элементы являются исполнительными (рис. 26А). В этом случае исполнительные элементы являются преобразователями одних результатов действия в другие, потому что результаты действий систем-доноров являются внешним воздействием для систем-реципиентов (для исполнительных элементов). Они (внешние воздействия) как бы входят в систему и выходят из неё уже преобразованными в виде новых результатов действия.
Если выходы элементов соединены с входами уставки других элементов, такие элементы являются управляющими и входят в состав блока управления (рис. 26В). В этих случаях результат действия одних систем является уставкой (директивой) для исполнительных элементов, директивой как преобразовывать результаты действия систем-доноров в результаты действия систем реципиентов.
Но всегда при соединении выходов и входов выполняется закон однородности действий и однородной интерактивности (гомореактивности) соединения выход-вход. Если, например, результатом действия элемента-донора является давление (системы «А»), то вход внешнего воздействия (система «В» на рис. 26А) или уставки (система «В» на рис. 26В) элемента-реципиента должен быть способен реагировать именно на давление, иначе взаимодействие между элементами невозможно.
В третьих, для того, чтобы «влезть» в управление других систем, у данной системы должна быть физическая или какая-либо другая возможность присоединить собственный выход результата действия или собственный стимулятор ко входу уставки какой-либо другой системы. В этом случае эта другая система становится подсистемой, подчиняющейся данному блоку управления. Т.е., системы должны иметь физическую возможность совмещать выходы своих стимуляторов и/или результатов действия с входами уставки других систем. Для этого они должны быть подвижны.
Если системы свободно двигаются в пространстве, они могут случайно или не случайно соединяться своими выходами-входами и образовывать новые системы. Случайно образовались органические вещества (СФЕ с простешими блоками управления) в первичном океане Земли. Случайно из них образовались первичные агрегаты из органических молекул (системы с простыми блоками управления). Случайно из них образовались первичные организмы (системы с простыми и сложными блоками управления). Случайно развились из них более сложные организмы (системы со сложными, с самообучающимися и интеллектуальными блоками управления). Случайно, но по закону эволюции видов – выживает сильнейший, т.е., наиболее приспобленный к данным условиям проживания. Тот, у кого случайно или не случайно блоки управления оказались лучше, у него больше шансов на выживание (здесь мы не касаемся причин «случайности» или «целенаправленности»).
Следовательно, для самоорганизации, случайной или целенаправленной, одним из главных условий является возможность присоединения выхода результата действия системы или её стимулятора ко входу уставки другой системы на принципе гомореактивности (давление → давление, температура → температура и т.д.). Для этого системы должны быть подвижны.
Если система уже построена в «железе», то такой возможности у её элементов нет. Если перерезать какой-нибудь двигательный нерв, то соответствующие мышцы не будут сокращаться, несмотря на то, что и они исправны, и все мозговые структуры исправны. Эти структуры не могут управлять мышцами потому, что не могут физически совместить свои стимуляторы или выходы результатов действия (аксоны) с входами уставок этих мышц (синапсами).
Если нарушена ООС, система также не сможет адекватно реагировать на внешние воздействия. У больных с повреждениями спинного мозга на уровне С5-С6 нарушается вегетативная баро- и хеморецеция (нарушается ООС), потому что соответствующие нервные проводники проходят в боковых рогах спинного мозга и повреждаются при травме. Поэтому у таких больных кроме тетраплегии (паралича мышц тела ниже плечевого пояса) развиваются различные тяжелые нарушения регуляции артериального давления. У них поражается система стабилизации артериального давления за счёт отключения её ООС.
Если нарушен сам блок управления, система также перестаёт нормально фукционировать. У больных с первичной альеолярной гиповентиляцией поражен дыхательный центр, расположенный в стволе головного мозга (нарушен блок управления) и они не могут нормально регулировать вентиляцию лёгких. Поэтому у них развивается альвеолярная гиповентиляция со всеми вытекающими отсюда последствиями.
Если системы подвижны, то такое становится возможным. Если совместить друг с другом концы разрезанного нерва, то появится шанс на восстановление двигательной активности парализованной мышцы.
Различные химические вещества, плавая в растворе, могут «захватывать» другие (совмещать свои выходы результата действия с входами уставок других систем) и образовывать более сложные конгломераты, которые в дальнейшем также могут захватывать другие конгломераты по тому же принципу захвата. Главным условием образования новых систем является возможность соединения выхода результата действия или стимулятора одних систем с входами уставки других систем на принципе гомореактивности соединений выход-вход.
Есть типы устройств, где требование физической подвижности необязательно и тем не менее потоки информации из одной системы могут перетекать в блоки управления других устройств. Это так называемые релейные сети, например, компьютерные управляющие сети, кора головного мозга и т.д., в которых возможна виртуальная подвижность, т.е., возможность переключения потоков информации. В таких сетях информация может перекачиваться в тех направлениях, в которых требуется.
Например, ноги человека предназначены для ходьбы, а руки – для рукоделия. Каким образом осуществляется предназначенность? Руки и ноги в общем устроены одинаково, те же кисти, те же пальцы (те же исполнительные элементы). Тем не менее, ногами, например, практически невозможно причесаться. Почему? Потому, что в головном мозгу есть определённые стереотипы движений, без которых и руки не руки, и ноги не ноги. Но нами известны случаи, когда человек лишался обеих рук и тем не менее с помощью ног прекрасно управлялся со многими бытовыми делами, и даже выступал в цирке. Как это было возможно? В его мозгу произошла перестройка, он поменял стереотипы. Мозговые структуры, которые прежде управляли руками, «перекачали» свои «базы знаний» в те мозговые структуры, которые управляют ногами. Всё это смогла сделать кора головного мозга только благодаря тому, что у неё есть свойство релейных цепей, т.е., возможность переключать потоки информации в нужных для данной цели направлениях.
При первичной альвеолярной гиповентиляции поражается дыхательный центр, расположенный в продолговатом мозгу. У таких больных нет нормальной регуляции дыхания, потому что пораженный дыхательный центр не «чувствует» повышения СО2 в крови. Они мало дышат, СО2 в крови растёт, О2 в альвеолярном воздухе падает, сосуды лёгких спазмируются из-за рефлекса Эйлера-Лильёстранда и развивается вторичная лёгочная гипертония с последующей сердечной недостаточностью. И всё это только потому, что больной мало дышит. Такого больного можно научить правильно дышать, ориентируясь по другим признакам, например, по чувству лёгкого головокружения от гипервентиляции, т.е., создать новый стереотип дыхания, создать корковый виртуальный дыхательный центр. Это пример практического использования самоорганизации систем.
Организация и реорганизация систем может быть случайной и целенаправленной. При случайной организации или реорганизации нет специального блока управления, который имеет цель и решение о постройке новой системы, да ещё в таких подробностях, что, например, такой-то выход стимулятора нужно соединить с таким-то входом уставки. Случайность определяется вероятностью. Здесь работает закон больших чисел, который гласит: «если что-то может произойти теоретически, то при очень большом числе случаев это обязательно произойдёт». Чем больше число случаев, тем больше вероятность появления любых систем, удачных и неудачных, потому что случайность строит системы, вероятность задаёт их конфигурацию, а внешняя среда производит естественный отбор. Поэтому эволюция длится очень долго, перебирая многие и многие случаи (варианты развития). Поэтому и происходят различные комбинации соединений частей систем. Поэтому могут образоваться как нежизнеспособные монстры, так и наиболее приспособленные к данным условиям. Слабые уничтожаются, а сильные передают свои «базы знаний» и «базы решений» своим поколениям в виде генетически закреплённых признаков и инстинктов (см. ниже).
При организации систем не столь важно, какой блок управления имеют соединяющиеся (организующиеся) системы, простейший или сложный. Важно только чтобы выходы стимуляторов или результатов действия одних систем соединялись с входами уставки других. Блоки управления объединяющихся систем могут быть любыми, от простейшего, до самообучающегося. При этом, если даже самообучающийся блок (т.е., достаточно развитый) не «захочет» соединить свой вход уставки с выходом стимулятора или результата действия другой системы, даже простейшей, он всё равно ничего не сможет сделать, если он не сможет уберечь свой вход уставки. Вирус «не спрашивает разрешения» у клетки, когда «перекачивает» свою генетическую информацию в её ДНК.
Решение о перестройке системы (целенаправленность) может приходить извне, от более высокой на лестнице иерархии управляющей системы. Это пассивная целенаправленность, потому что инициатива приходит извне. Внешняя система «говорит» данной системе: «Как только увидишь такую-то систему, сразу присоединяй её к себе». Система может делать активные действия для такой организации, но это ещё не самоорганизация, а навязанная (принудительная, директивная) организация.
Но если у самих систем «возникает мысль», что «неплохо было бы вон ту зелёную штучку, что прилипла ко мне, включить в собственный состав, поскольку опыт показал, что она может поставлять мне глюкозу из СО2 и света», это уже самоорганизация. Таким образом, возможно, когда-то очень давно хлорофил был включен в состав водорослей. Скорее всего это произошло не целенаправлено, а случайно (случайная организация), поскольку мы не можем быть уверены, что у тех древних водорослей был самообучающийся блок управления, а самостоятельно «мысль» возникнуть может у систем только с таким блоком управления. Этот пример приведен только для иллюстрации того, что мы называем самоорганизующейся системой. Но мысль взять палку в руки, чтобы удлинить свою руку и достать с дерева высоко висящий плод – это уже прерогатива только высших животных и человека и это является настоящим примером самоорганизации.
Только системы с самообучающимся блоком управления могут оценить внешнюю ситуацию, правильно оценить значение всего нового, что окружает данную систему и сделать вывод о целесообразности перестройки. Это уже активная целенаправленность, потому что инициатива возникла внутри данной системы, она сама «решила» и никто ей этого «не навязывал». Внешняя среда диктует условия существования систем и она может «заставить» систему принять решение о реорганизации. Но решение о времени и характере реорганизации система принимает сама на основе своего личного опыта и возможностей. Только системы с самообучающимся блоком управления могут иницировать активную целенаправленность, могут быть сознательно самоорганизующимися. Так человек изобрел инструменты труда, усилив возможности своего тела.
При этом следует отметить, что решение о самоорганинизации не указывает на свободу выбора цели системы, а является свободой выбора её действий, для достижения цели, заданной извне. Чтобы лучше выполнить свою цель, например, выжить в таких-то условиях, система принимает решение о реорганизации, чтобы лучше адаптироваться к внешним условиям и поднять свои шансы выжить.
Обмен веществ и виды самоорганизации.
Всё, что было сказано выше, касалось лишь создания новых систем и их развития. Но любые системы постоянно подвергаются различным внешним воздействиям, которые рано или поздно разрушают их. Наш Мир находится в постоянном и беспрерывном движении. Скорости этого движения могут быть различными: где-то события происходят раз в миллионы лет, а где-то – миллионы раз в секунду. Но, по всей видимости, невозможно найти уголок во Вселенной, где бы не происходило какого-либо движения, теплового, электрического, гравитационного и пр. Следовательно, всегда есть процесс отрицательной энтропии. Любые системы всегда реорганизуются за счёт распада более сложных ранее существующих систем, они стареют (дегенерируют). Разрушение – это процесс потери системами своих СФЕ.
Системы минерального мира (кристаллы, любые другие аморфные, но неживые тела, планетарные, звездные и галактические системы) постоянно испытывают различные внешние воздействия и рассыпаются с той или иной скоростью за счёт потерь своих СФЕ. Минеральный мир стареет и изменяется, потому что работает закон энтропии – от более сложного к более простому.
В минеральном мире усложнение (генерация) может быть только при избытке внутренней энергии или при постоянном её притоке извне. Так в термоядерном котле обычных звёзд образовались ядра сложных атомов вплоть до железа. Но для образования более тяжелых ядер энергии таких котлов уже недостаточно. Все остальные более тяжелые ядра образовались при взрывах сверхновых звёзд, при сверхмощных выделениях энергии. Поэтому, образно говоря, наши с вами тела построены из пепла звёзд. Но как только заканчивается энергия термоядерного синтеза, звезда начинает умирать, проходя через определённые фазы. Мы ещё не знаем всех фаз развития и смерти звёзд, но если не «предпринять каких-либо мер», то по истечении очень длительного времени рассыпятся не только звёзды, но даже и атомы и их составляющие – протоны, нейтроны и электроны. Так свободный нейтрон, «незащищенный» внутриядерной системой, распадается на протон, электрон и нейтрино в течение 12 минут. Следовательно, атомарная и внутриядерная система является системой стабилизации нейтрона, предохраняющей атом и его элементы от распада. Но даже такие стабильные и казалось бы вечные звёздные образования, как «чёрные дыры» со временем «испаряются», растрачивая свою массу на гравитационные волны. Если нет притока энергии, то система будет только рассыпаться и терять свои СФЕ. Это однозначно следует из законов термодинамики. Впереди грядёт так называемая «тепловая энтропийная смерть».
Разрушение систем под действием внешней среды – это принудительная энтропийная реорганизация (дегенарция), но не самоорганизация. У объектов минерального мира есть только пассивные средства защиты от разрушения и одним из основных способов защиты является объединение элементов именно в систему (генерация). Следовательно, появление систем и их эволюция в минеральном мире является средством защиты этих элементов от разрушения. Один в поле не воин. Система всегда сильнее одиночек. Образование связей междц элементами и возникновение систем в минеральном мире по типу генерации является пассивным способом защиты элементов против разрушающего действия отрицательной энтропии. Самые слабые тела – это ионные и газовые облака, самые крепкие – кристаллы. Однако все они не могут сколь-угодно долго противостоять против внешних воздействий, потому что реагируют лишь после их появления, и они не могут противостоять энтропии. Вода камень точит.
Следовательно, пассивных средств недостаточно для защиты от разрушения. Какие-бы ни были твердыми и крупными кристаллы, со временем и они рассыпаются. Чтобы сохранить систему от разрушения нужно постоянно восполнять разрушенные части.
Системы растительного, животного и мира человека также испытывают различные внешние воздействия и также рассыпаются (изнашиваются) с той или иной скоростью. И это происходит по той же причине, работает тот же закон отрицательной энтропии – от более сложного к более простому (дегенерация). Но эти системы отличаются от систем минерального мира тем, что активно пытаются противостоять разрушению путём постоянного обновления состава своих СФЕ. Это обновление происходит за счёт постоянной постройки новых СФЕ взамен разрушенных. Этот процесс обновления разрушаемых СФЕ и является структурной регенерацией – целенаправленным обменом веществ. Поэтому обмен веществ живых организмов является активным способом защиты систем от разрушающего действия отрицательной энтропии (от дегенерации).
В минеральном мире также может быть обмен веществ, но он принципиально отличается от обмена веществ любых живых систем. Кристаллы растут из перенасыщенного солями раствора, атмосфера обменивается с морями водой и газами, автомобильные и прочие двигатели внутреннего сгорания потребляют горючее и кислород и выделяют углекислый газ. Но если кристалл вынуть из солевого раствора, он будет только разрушаться и не будет предпринимать никаких мер по сохранению своего состава. Когда в автомобильном двигателе изнашивается распределительный вал, то автомобиль сам ничего не делает для того, чтобы его заменить. Вместо него это делает человек. Любые действия системы, направленные на замещение разрушенных и утеряных СФЕ – это уже самоорганизация, которая в живом мире носит название структурной самореорганизации или обмена веществ. В минеральном мире структурной самореорганизации нет.
Любая живая система, независимо от её сложности, будет предпринимать определённые действия для сохранения своего состава. Причём в живых системах всегда есть два потока веществ – энергетический и «строительный». Энергетический предназначен для того, чтобы обеспечить энергией любые действия систем, в том числе и для структурной самореорганизации, потому что необходимо каждый раз строить новые связи, требующие энергии (регенерация). «Строительный» поток веществ идёт только на структурную регенерацию, т.е., на замену изношенных СФЕ на новые (в данном случае мы не рассматриваем рост системы, т.е., генерацию). Когда мы говорим о самореорганизации, имеем ввиду именно «строительный» поток веществ, хотя без энергии этот поток невозможен.
Миокард человека полностью обновляет (регенерирует) свой молекулярный состав примерно за месяц. Это значит, что его миокардиоциты, вернее их элементы (миофибриллы, саркомеры, органеллы, мембраны и пр.) постоянно изнашиваются и разрушаются, но с той же скоростью постянно строятся вновь [23]. Внешне мы можем видеть одну и ту же миокардиальную клетку, но с течением времени её молекулярный состав полностью обновляется.
На протяжении жизни человека тип организации меняется. В начале жизни происходит организация за счёт включения в свой состав новых дополнительных элементов (генерация, организм растёт и развивается), а с середины жизни преимущественно происходит дегенерация – процесс разрушения (распад ранее существующей более сложной системы). Но это уже частности, связанные с несовершенством реальных живых систем. Для любой системы главная цель – быть в этом Мире, а для этого она должна противодействовать разрушительным воздействиям, и для этого у неё должны быть определённые СФЕ, с помощью которых она действует, которые постоянно разрушаются и которые нужно постоянно обновлять, т.е., заново строить – в регенерации суть самореорганизации с помощью обмена веществ.
Следовательно, живой мир от неживого отличается прежде всего обменом веществ, направленным на сохранение своего состава – структурной регенерацией. В принципе любая реакция любых систем направлена на сохранение самих систем. Об этом заботится блок управления систем, используя для этого все свои возможности – ППС, ОСС и анализаторы для управления СФЕ. Но в минеральном мире есть только пассивные способы защиты. И когда система минерального мира теряет свои СФЕ, она ничего активно не делает, чтобы их заместить. Она посопротивляется внешнему воздействию, но не более того.
В растительном, животном и мире человека системы также не могут пассивно противостоять против разрушительного действия внешней среды, они также разрушаются, но у них уже есть активное средство восстановления разрушенных частей – есть целенаправленный обмен веществ, направленный на замещение потерянных СФЕ (структурная регенерация).
Он использует два механизма так называемой генетической регенерации – размножение самих систем (родитель помрёт, но дети останутся) и размножение элементов систем (регенерация элементов клеток и самих клеток тканей). Эти способы сохранения систем достаточно эффективны. Мы знаем, как трудно избавиться от сорняков на поле. Нам также знакомы секвойи возрастом в несколько тысяч лет.
На уровне отдельных особей вида эта генетическая система проявляет себя как система с простым блоком управления, как простой автомат, потому что у молекулы ДНК нет дистанционных сенсоров, нет анализатора-коррелятора и у неё невозможно выработать условные рефлексы за время жизни одной особи. Но на уровне вида живых систем генетический механизм проявляется себя уже как система с сложным блоком управления, потому что он «знает» о пространстве и у есть коллективная память по типу условных рефлексов и самообучаться может (приспособление видов). Потому и происходит генетическое накопление коллективного опыта, который затем проявляется в виде инстинктов на уровне отдельных особей вида. Этот групповой генетический механизм следит за тем, чтобы помидор был похож на помидор, таракан на таракана, а шимпанзе на шимпанзе и поведение систем было соответствущим.
Мы ещё не знаем всех деталей этого механизма, хотя и построены геномы многих живых организмов, включая человека. Мы знаем, что в генах записана генетическая информация о том, как построить тот или иной белок, но мы пока не знаем, каким образом задаётся, например, форма носа, построенного из этого белка. Мы знаем ген, который отвечает за выработку пигмента, который окрашивает радужную перегородку глаза, но не знаем, каким образом кодируется форма и размер этой перегородки. Возможно, этот механизм реализован на самом ДНК лишь частично, потому что геном насекомого намного больше похож на геном, скажем, человека, чем само насекомое похоже на человека. Мы не знаем, каким образом программируются усики какого-либо насекомого и именно такой-то длины, где записано, что у него должно быть именно восемь ног или один рог на голове. И почему из этих белков, которые запрограммированы в каком-либо гене ДНК, здесь должны собираться конструкции именно в форме усиков, а в другом месте в форме трубочек кишечника.
Молекулы белка являются очень сложными и гигантскими по молекулярным меркам образованиями с очень сложной трёхмерной конфигурацией. Возможно, отдельные молекулы определённых видов белков случайно или неслучайно могут таким образом подходить друг к другу, что из них, как в пазеле, может собираться только определённой формы белковый конгломерат. И таким образом можно объяснить и форму и размеры белковых конструкций. Мы можем также предположить, что случайно собранные неудачные формы были отбракованы эволюцией, а удачные целенаправленно закрепились в генах. Следовательно, различие формы органов, построенных из одинаковых белков, объясняется различием строения молекулы белков? Может быть...
Но почему здесь кератин формируется в виде надкрыльников, а там – в виде рогов, или каких-либо перегородок внутри тела насекомого? ДНК программирует только строительный материал – белки, но не саму конструкцию (форму) – органы, которые построены из этих белков, потому что в ней записано только лишь как построить белки («кирпичи» для постройки здания). Но где записан «чертёж всего здания», где записана его форма? Ответов пока нет.
Таким образом, у живых систем есть целенаправленная генетическая структурная регенерация, назначение которой – постоянное обновление элементов системы. Генетический механизм использует «базу данных», записанную в ДНК и реализуемую с помощью РНК. Если бы не было сбоев в этой системе, то не было бы мутаций и не было бы изменчивости видов.
Однако «сбойный» механизм мутирования слишком подвержен случайностям и не может быть целенаправленным именно в силу случайности (случайная самоорганизация). Половой механизм мутирования позволяет производить отбор уже по каким-либо признакам, а это уже целенаправленная мутация (целенаправленная самоорганизация). Этот механизм может менять свою программу при перекрёстных спариваниях или при смене фаз жизни (личинка→куколка→бабочка), но возможности такой перемены всё равно очень ограничены. У волка никогда не родится тигр и не отрастёт хобот, если он вдруг понадобится, во всяком случае не в течение жизни одного поколения.
Но если мне именно сейчас понадобилось «перестроить», например, руку, чтобы удлинить её и сорвать плод с дерева, тогда что же, мне ждать несколько поколений, чтобы моя рука выросла и удлинилась? Нельзя ли перестроится, не используя обмен веществ?
Можно, если добавить «сознательную» самоорганизацию. У всех живых существ, включая и человека, есть генетическая система случайной самоорганизации и в этом смысле человек является таким же животным, как любое другое животное. Но «сознательный» и целенаправленный тип самоорганизации есть только у человека. Системы с заданными (целевыми) свойствами всегда будут образовываться лишь в том случае, если организация или реорганизация систем целенаправленная. Только блок управления «знает» о цели системы и только он может принимать решения, в том числе о перестройке системы. Но не каждый блок управления подходит для целевой перестройки. Для того, чтобы решить, что «вон ту систему» нужно присоединить к себе, нужно «видеть» эту систему, знать её свойства и определить, подходят ли эти свойства для достижения собственной цели, ещё до начала взаимодействия. А для этого нужно уметь «видеть» и оценить ситуацию вокруг данной системы. Такой анализ могут делать только самообучающиеся системы. Поэтому многие высшие животные могут реорганизовать свое тело, усилив его возможности дополнительными исполнительными элементами. Они используют орудия труда для добывания пищи – камни, палки и т.д. Но, вероятно, эти животные действуют на уровне инстинктов, т.е., на уровне генетической самоорганизации, потому что даже насекомые могут использовать орудия труда.
Истинная «сознательная» самоорганизация есть только у человека, потому, что только у него есть анализаторы-абстракторы соответствующей степени сложности. Только человек смог развить орудия труда до уровня современных технологий, потому что у него есть вторая сигнальная система, которая помогла накопить опыт предыдущих поколений путём его фиксации в абстрактной форме – в виде письма. И только человек, используя этот опыт, осознал, что есть обмен веществ в живом организме, и что можно воздействовать на организм, чтобы его реорганизовать, если в этом появляется необходимость (лечить больной организм).
Структурная регенерация предназначен для сохранения состава систем. Но обмен веществ также не является полной гарантией от разрушения систем. Растения не могут предвидеть предстоящее разрушение, потому что у них нет понятия о пространстве и они не видят ситуацию вокруг них, потому что у них простой блок управления. Огонь подползёт и сожжет растение, животное подойдёт и съест его, а растение будет спокойно ждать своей участи, потому что не видит окружающей ситуации, не знает прогноза и у него нет соответствующих решений на определённые ситуации. Поэтому появились системы с более сложными блоками управления (животные и человек), которые могут предвидеть ситуацию и предохранить себя от разрушения.
Животные знают о пространстве и видят ситуацию вокруг, потому что у них более сложные блоки управления. Они могут весьма эффективно конкурировать с минеральным и растительным мирами. Но конкуренция между видами животных поставила их в новые условия. Уже недостаточно иметь только сложный блок управления и видеть ситуацию вокруг себя. Чтобы выжить нужно не только быстро бегать или быть сильным физически, нужно лучше ориентироваться в пространстве, лучше оценивать ситуацию и уметь делать выводы из своих неудач, если остался жив. Для этого нужно развивать свои блоки управления. Чем сложнее блок управления, тем лучше сохранность. И уже не физическая сила является критерием преимущества, а мыслительные способности, т.е., чем сложнее блок управления (мозг со всей иерархией нервных структур), тем лучше. Знание – сила. При этом цели обмена веществ у животных и у человека те же, что и в растительном мире – размножение самих систем и размножение элементов систем.
Следовательно, по мере продвижения эволюции, для более полной сохранности систем к возможностям регенерации в виде обмена веществ добавляются интеллектуальные возможности блоков управления. Независимо от того, к какому миру принадлежит система, к минеральному, растительному, животному или человека, одна из главных её целей – всегда сохранять себя и свой состав. Но в минеральном мире есть только пассивные способы сохранения, а в живом мире есть уже активные способы – самоорганизация за счёт целенаправленного обмена веществ. Поэтому борьба за еду всегда была основой жизни.
Но только обмена веществ недостаточно. Поэтому у животных к нему добавляются новые активные способы защиты – оценка внешней ситуации и предохранение от разрушающих внешних воздействий (сложные рефлексы, поведенческие реакции). Однако и сложных рефлексов недостаточно, необходимо ещё и учиться новым ситуациям и новым решениям (рефлексы на новые раздражители). Но и их также оказалось недостаточно из-за ограниченности личного опыта. Поэтому к личному опыту добавился коллективный опыт за счёт первой сигнальной системы (условные рефлексы – первая сигнальная система, сложные поведенческие реакции). А так как время жизни каждой системы ограничено, то для того, чтобы передать опыт последующим поколениям, возникла вторая сигнальная система, которая позволяет сохранить личный опыт каждой системы в виде письма, независимо от времени её жизни.
Отсюда, чтобы лучше сохранять свой себя, приходится постоянно менять и усложнять свой состав (эволюция и развитие видов) и, по-видимому, на всякий случай всё же лучше быть посложнее, чем попроще. Поэтому, чтобы лучше противостоять в этой борьбе, нужно постоянно перестраивать себя. Поэтому происходит постоянное усовершенствование живых систем – гонка эволюции.
Таким образом, у системы может быть:
случайная организация
- генерация (случайное физическое совпадение выходов стимулятора или результата действия одних систем со входами уставки блока управления или входами внешнего воздействия других систем, может быть у систем с любыми блоками управления, включая простейшие)
- дегенерация (разрушение, упрощение состава, потеря своих СФЕ под действием внешней среды – других систем, может быть у систем с любыми блоками управления, включая простейшие)
целенаправленная организация
- принудительная генерация (целенапрвленное физическое совмещение выходов стимулятора или результата действия одних систем со входами уставки блока управления или входами внешнего воздействия других систем, может быть у систем с любыми блоками управления, включая простейшие)
- принудительная дегенерация (разрушение, упрощение состава, потеря СФЕ системы под целенаправленным действием других систем, может быть у систем с любыми блоками управления, включая простейшие)
самоорганизация
- функциональная регенерация (работа самой системы, включение или выключение функций собственных СФЕ, в зависимости от потребностей ситуации, без изменения своего состава, может быть у систем с любыми блоками управления, включая простейшие)
- генетическая структурная регенерация в виде обмена веществ и размножения особей, направленая на сохранение своего состава (может быть у систем с блоками управления, начиная с простых)
- генетическая структурная регенерация в виде безсознательной структурной реорганизации, направленной на усиление возможностей организма путём использования других систем, прямо не входящих в состав данной системы (предметов) (использует «генетическую» память и может быть у систем с блоками управления, начиная с простых)
- сознательная структурная регенерация, направленная на усиление возможностей организма путём использования других систем, прямо не входящих в состав данной системы (предметов) (различные технологии, направлена на усиление возможностей организма, может быть у систем с блоками управления, начиная с сложных со второй сигнальной системой)
Как видим, существует преемственность в данной классификации организации систем, потому что включает в всё, что существует в нашем Мира, начиная с объектов минерального мира и включая деятельность человека в виде промышленных технологий.