

6.9. Интегрированные функциональные элементы
В целях повышения КПД, снижения энергопотребления, уменьшения массы и габаритов аппарата применяют интегральные микросхемы (ИМС) в составе системы управления. С их помощью осуществляется выработка и преобразование так называемых сигналов информационного уровня, напряжением, как правило, до 10 В.
По функциональному признаку ИМС принято разделять на цифровые и аналоговые ИМС.
Основной особенностью цифровых ИМС является то, что обрабатываемые ими сигналы имеют вид импульсов с двумя четко выраженными уровнями: высокий уровень 5…10 В соответствует логической 1, низкий уровень 0…1 В соответствует логическому 0.
Наиболее простыми и распространенными цифровыми ИМС являются логические элементы. Далее по мере возрастания сложности выполняемых операций выделяют:
цифровой узел (логическая схема), который представляет собой несколько логических элементов, выполняющих в совокупности определенную функцию;
цифровое устройство в виде комплекса узлов, выполняющее на основе логических, вычислительных и других операций сложные функции управления.
Как правило, сложные цифровые устройства основаны на соединении по определенной схеме логических элементов НЕ, И, ИЛИ и комбинаций типа И-НЕ, ИЛИ-НЕ, И-ИЛИ-НЕ, И-ИЛИ и др.
Зависимость выходной логической переменной yi устройства от входных переменных xj (j=1, 2,…,m) характеризуется логической функцией
yi=fi(x1, х2,…, хm) , i=1, 2,…,n .
Наиболее полная и распространенная форма представления логической функции – это таблица истинности. В табл. 6.4 представлены некоторые логические функции двух переменных х1 и х2 .
Таблица истинности типовых функций двух переменных
Таблица 6.4.
|
Номер набора |
Набор переменных |
уI
ИЛИ |
yII
И |
yIII
ИЛИ -НЕ |
yIV
И- НЕ |
yV
~ |
yVI
|
|
|
x1 |
x2 |
|||||||
|
1 2 3 4 |
0 1 0 1 |
0 0 1 1 |
0 1 1 1 |
0 0 0 1 |
1 0 0 0 |
1 1 1 0 |
1 0 0 1 |
0 1 1 0 |

Основными операциями, выполняемыми с логическими переменными, являются дизъюнкция (ИЛИ), конъюнкция (И), инверсия (НЕ). На основании этих операций может быть построена любая логическая функция.
Условные обозначения логических элементов показаны на рис. 6.18.

Одним из важнейших логических элементов, который реализует функцию «Память», является триггер. Его выходная переменная зависит не только от комбинации значений двух входных переменных х1 и х2 , но и от предшествующего состояния триггера. Для того, чтобы запомнить кратковременный входной сигнал х1 =1 или х2 =1 используется обратная связь. Выходная переменная у подается на вход триггера. Если принять, что по сигналу х1 =1 триггер должен устанавливать на выходе у =1, а по сигналу х2 =1 устанавливать у =0, то характеристику управления триггера можно представить логическим выражением
у=( х1 ИЛИ у) И (НЕ х2) .
Одновременная подача сигналов х1 =1 и х2 =1 в рассматриваемом случае теряет смысл и исключается. Схема реализации триггера в соответствии с приведенным логическим выражением показана на рис. 6.19а. Условное графическое изображение триггера, реализованного на интегральной микросхеме, приведено на рис. 6.19б.
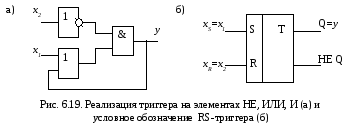
По способу переключения и по закону функционирования триггеры можно разделить на следующие группы: RS-триггеры с раздельной установкой 0 и 1; D-триггеры задержки; универсальные JK-триггеры; T-триггеры счетные. Приведенный на рис. 6.19 триггер относится к группе RS-триггеров. Такие триггеры, как и триггеры других типов, могут быть реализованы на различных логических элементах и поэтому могут быть представлены различными логическими схемами. Выходной сигнал триггера принято обозначать буквой Q.
Название триггеров определяется первыми буквами слов на английском языке: S (set - установить); R (reset - выключить); T (toggle - релаксатор); J (jerk - резко включить); K (kill - резко выключить); D (delay - задержка).
На основе логических схем и триггеров реализуют различные блоки и устройства цифровых систем управления (регистры, счетчики, дешифраторы, шифраторы, мультиплексоры, сумматоры, запоминающие устройства и др.).
На основе комплекса типовых устройств может быть синтезировано унифицированное устройство с широким набором логических и вычислительных функций, воспроизведение которых осуществляется с помощью заранее составленной программы управляющих воздействий. Такое программно-управляемое унифицированное цифровое устройство, выполненное на большой интегральной схеме, называют микропроцессором. Он предназначен для обработки цифровой информации и управления процессом этой обработки.
Микропроцессор как управляющее устройство может входить составной частью в систему управления электронного аппарата.
Представим микропроцессор (МП) в виде некоторого «черного ящика» (рис. 6.20а). Он имеет вход и выход для рабочей информации (данные D , D’ ) и вход для команд Х управления данными.

Внутри МП происходят два процесса: процесс обработки данных, в котором поступающие в МП данные D подвергаются логическим и вычислительным операциям и в новом качестве D’ выводятся из МП, и процесс управления обработкой данных D на основе заранее составленной программы (Х).
Источником исходных данных и программы является запоминающее устройство (ЗУ). Приемником обработанных данных служит так называемое «устройство ввода-вывода» (УВВ), через которое обработанная цифровая рабочая информация D’ в преобразованном виде передается на объект управления (ОУ), например, формирователь импульсов управления электронным ключом (рис. 6.20б). Из ОУ в УВВ по обратной связи может поступать информация о состоянии объекта управления. Поток рабочей информации может иметь обратное направление от УВВ к МП и к ЗУ. Это позволяет обрабатывать данные обратных связей и запоминать результаты операций, выполненных микропроцессором. Взаимосвязанная совместная работа всех устройств обеспечивается управляющими сигналами, которые передаются от МП к ЗУ и к УВВ. Согласование действий во времени достигается с помощью синхронизирующих импульсов, для выработки которых предусматривают генератор тактовых импульсов. При такой организации информационных процессов МП, ЗУ и УВВ в совокупности называют микропроцессорной системой управления (МПУ).
Литература
-
Электрические и электронные аппараты: Учебник для вузов/ Под ред. Ю.К. Розанова. 2-е изд. – М.: Информэлектро, 2001.
-
Марков Э.Т. Судовые электрические аппараты. - Л.: Судостроение, 1982.
-
Родштейн Л.А. Электрические аппараты. - М.: Энергия, 1980.
-
Таев И.С. «Электрические аппараты управления». Высшая школа, 1984.
-
Чунихин А.А. Электрические аппараты. Учебн. Для вузов. - М.: Энергоатомиздат, 1988.
-
Теория электрических аппаратов: Учебник для вузов/ Г.Н. Александров, В.В. Борисов, Г.С. Каплан и др.; Под ред. проф. Г.Н. Александрова. 2-е изд., перераб. и доп. СПб.: Изд-во СПбГТУ, 2000.
7. Алиев И.И., Абрамов М.Б. Электрические аппараты. Справочник. - М.: ИП РадиоСофт, 2004.
8. Розанов Ю.К. Электронные устройства электромеханических систем: Учеб. пособие для студентов высш. Учеб. Заведений / Ю.К. Розанов, Е.М. Соколова. – М.: Издательский центр «Академия», 2004.
9. Терехов В.М. Элементы автоматизированного электропривода: Учебник для вузов. – М.: Энергоатомиздат, 1987.