

§ 4. Матрица поворота для произвольного спина
Сейчас, я надеюсь, вам уже ясно, как важно представление о моменте количества движения для понимания атомных процессов. До сих пор мы рассматривали только системы со спинами (или «полными моментами количества движения») 0, 1/2 и 1. Но бывают, конечно, и атомные системы с большими моментами количества движения. Для анализа таких систем нужны такие же таблицы амплитуд поворота, какие мы привели в гл. 15, § 6. Иными словами, нужна матрица амплитуд для спина 3/2, 2, 5/2, 3 и т. д. Мы не будем подробно рассчитывать эти таблицы, но хотели бы показать, как это делается, чтобы вы, если понадобится, могли сами это проделать.
Как мы видели раньше, любая система со спином, или «полным моментом количества движения», j может существовать в одном из 2/ + 1 состояний, в которых z-компонента момента количества движения принимает одно из дискретных значений j, j-1, j -2, . . ., -(j-1), -j (все в единицах h). Обозначая z-компоненту момента количества движения произвольного выбранного состояния через mh, можно определить состояние момента количества движения, задав численные значения двух «квантовых чисел момента количества движения» j и m. Такое состояние можно отметить, указав вектор состояния | j, m>. В случае частиц со спином 1/2 могут быть два состояния | 1/2, 1/2) и | 1/2, -1/2> a состояния системы со спином 1 в этих обозначениях можно записать как |1, +1>, |1, 0>, | 1, -1>. У частицы со спином 0 может быть, конечно, лишь одно
состояние | 0, 0>.
Теперь мы можем посмотреть, что происходит, когда мы проецируем общее состояние | j, m> на представление, относящееся к повернутой системе осей. Прежде всего известно, что j — это число, которое характеризует систему, поэтому оно не меняется. При повороте осей мы получим просто смесь различных значений т для одного и того же j. В общем случае появится амплитуда того, что система в повернутой системе координат окажется в состоянии | j, m'>, где m' — новая z-компонента момента количества движения. Значит, нам нужны матричные элементы <j, m' |R|j, m> всевозможных поворотов. Мы уже знаем, что бывает, если поворот делается на угол вокруг оси z. Новое состояние — это попросту старое, умноженное на eim, у него по-прежнему то же значение т. Это можно записать так:
![]()
или, если вам больше нравится,
![]()
(где m,m' равно единице при m' = m, и нулю в прочих случаях).
При поворотах вокруг любой другой оси возникает перемешивание различных m-состояний. Можно было бы, конечно, попытаться подсчитать матричные элементы для произвольных поворотов, описываемых углами Эйлера , и . Но будет легче, если мы вспомним, что самый общий такой поворот может быть составлен из трех поворотов Rz(), Ry(), Rz(); так что если мы знаем матричные элементы для поворотов вокруг оси y, то уже располагаем всем необходимым.
Как же нам найти матрицу поворота для поворота частицы со спином j на угол вокруг оси у? Опираясь на основные законы (и на то, что уже было), это сделать нелегко. Мы так поступали со спином 1/2: вывели все, что нужно, пользуясь довольно сложными соображениями симметрии. Для спина 1 мы это проделали уже иначе: рассмотрели частный случай, когда система со спином 1 складывается из двух систем со спином 1/2. Если вы последуете за нами и признаете правильным тот факт, что в общем случае ответы зависят только от спина j, а не от того, как скреплены между собой разные части системы со спином j, то мы сможем обобщить рассуждения для спина 1 на произвольный спин. Мы сможем, например, соорудить искусственную систему со спином 3/2 из трех объектов со спином 1/2. Мы сможем даже избежать всяких усложнений, вообразив, что все они суть различные частицы — скажем, протон, электрон и мюон. Преобразуя каждый объект со спином 1/2, мы увидим, что происходит со всей системой — надо только вспомнить, что для комбинированного состояния все амплитуды перемножаются. Давайте посмотрим, как все это проходит.
Допустим, мы расположили все три объекта со спином 1/2 спинами вверх; обозначим такое состояние |+++>. Если мы взглянем на него из системы координат, повернутой относительно оси z на угол , то каждый плюс останется плюсом, но умножится на еi/2. Таких множителей у нас тройка, так что
![]()
Ясно, что состояние |+++> — это как раз то, что мы называем состоянием m=+3/2, или состоянием |3/2, + 3/2>.
Если мы затем повернем эту систему вокруг оси у, то у каждого из объектов со спином 1/2 появится некоторая амплитуда стать плюсом или стать минусом, так что вся система станет теперь смесью восьми возможных комбинаций |+++>,
|++->, |+-+>, |-++>, |+-->, |-+->,
|--+> или |--->. Ясно, однако, что их можно разбить на четыре группы, чтобы каждая соответствовала своему значению m. Прежде всего мы имеем |+++>, для которого m=3/2. Затем имеется тройка состояний |++->, |+-+> и |-++> — каждое с двумя плюсами и одним минусом. Поскольку каждый из объектов со спином 1/2 имеет равные шансы стать после поворота минусом, то каждая из этих трех комбинаций должна войти на равных паях. Поэтому возьмем комбинацию
![]()
где множитель 1/3 поставлен для нормировки. Если мы повернем это состояние вокруг оси z, то получим множитель ei/2 для каждого плюса и e-i/2 для каждого минуса. Каждое слагаемое в (16.27) умножится на ei/2, и общий множитель еi/2 мы вынесем за скобки. Такое состояние соответствует нашему представлению о состоянии с m=+1/2; мы приходим к выводу, что
![]()
Точно так же можно написать
![]()
что соответствует состоянию с m=-1/2. Заметьте, что мы берем только симметричные сочетания, у нас нет комбинаций, куда входят слагаемые со знаком минус. Они отвечали бы состояниям с таким же т, но с иным j. Это аналогично случаю спина 1, где (1/2){|+->+|-+>} было состоянием | 1,0>, а (1/2){|+->-|-+>} было состоянием | 0,0>. Наконец, мы имеем
![]()
Эта четверка состояний сведена в табл. 16.1.
Таблица 16.1 • СВОДКА СОСТОЯНИЙ
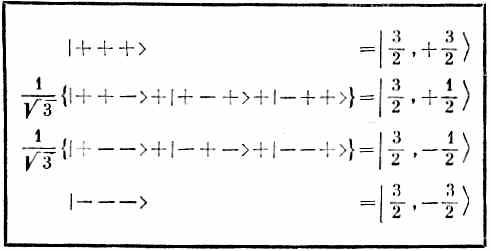
Все, что нам теперь нужно сделать, это взять каждое состояние, повернуть его вокруг оси у и посмотреть, сколько новых состояний оно создаст — пользуясь известной нам матрицей поворота для частицы спина 1/2. Можно поступать так же, как мы это делали в случае спина 1 [см. гл. 10, § 6 (вып. 8)]. (Только алгебры будет побольше.) Мы будем строго следовать идеям гл. 10 (вып. 8), так что подробных объяснений давать не будем. Состояния в системе S будут обозначаться

и т. д.; T-системой будет считаться система, повернутая вокруг оси у системы S на угол . Состояния в T-системе будут обозначаться |3/2, + 3/2, Т>, |3/2, + 1/2, Т> и т. д. Ясно, что | 3/2, + 3/2, Т> это то же самое, что | +' + ' + ' > (штрихи всегда относятся к T-системе). Точно так же |3/2, +1/2, Т> будет равняться
![]()
и т. д. Каждое |+'>-состояние в T-системе получается как из |+>-, так и из |->-состояний в системе S с помощью матричных элементов из табл. 10.4 (вып. 8, стр. 267).
Если мы имеем тройку частиц со спином 1/2, то (10.47) надо заменить на

Пользуясь обозначениями табл. 10.4, получим вместо (10.48) уравнение

Это уже дает нам некоторые из наших матричных элементов <jT| iS>. Чтобы получить выражение для 3/2, +1/2, S> мы должны исходить из преобразования состояния с двумя плюсами и одним минусом. К примеру,

Добавляя два сходных выражения для + — +> и | — + +> и деля на ]/3, найдем
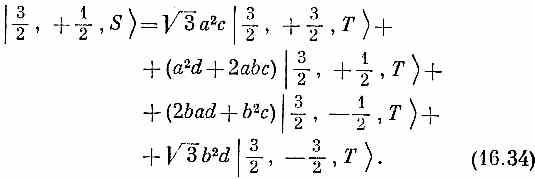
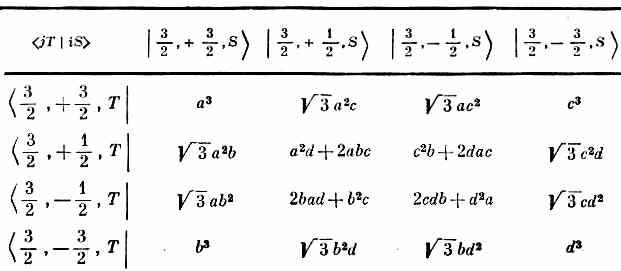
Продолжая этот процесс, мы найдем все элементы <jТ|iS> матрицы преобразования. Они приведены в табл. 16.2. Первый столбец получается из (16.32), второй — из (16.34). Последние два столбца были вычислены таким же способом. Теперь допустим, что T-система была повернута относительно S-системы на угол вокруг ее оси у. Тогда а, b, с и d равны [см. (10.54), вып. 8]: а=d=cos/2, с=-b=sin/2. Подставляя это в табл. 16.2, получаем формулы, похожие на вторую половину табл. 15.2, но на этот раз для системы со спином 3/2.
Таблица 16.2 • МАТРИЦА ПОВОРОТА ДЛЯ ЧАСТИЦЫ СО СПИНОМ 3/2
Коэффициенты а, b, с и d объясняются в табл. 10.4.
Рассуждения, которые мы только что провели, были обобщены на систему с произвольным спином j. Состояния |j, m> можно составить из 2j частиц со спином 1/2 у каждой. (Из них j+m будут в ] + >-состоянии, а j-m будут в |->-состоянии.) Проводится суммирование по всем возможным способам, какими их можно сочетать, а затем состояния нормируются умножением на надлежащую постоянную. Если у вас есть способности к математике, то вы сможете доказать, что получается следующий результат:

где k пробегает все те значения, при которых под знаком факториала получаются неотрицательные величины.
Это
очень запутанная формула, но с ее помощью
вы сможете проверить табл. 15.2 для j=1
(стр. 129) и составить ваши собственные
таблицы для больших j.
Некоторые матричные элементы очень
важны и получили особые наименования.
Например, матричные элементы для m=
m'=0
и
целых j
известны
под названием полиномов Лежандра и
обозначаются </, 0 |
![]()
Первые из них таковы:
P0(cos)=l, (16.37)
p1(cos)=cos, (16.38)
