

6.Дослідження динаміки системи привода
Дослідження динаміки системи привода відбувається за схемою:

Структурна схема у MathLab має наступний вигляд:

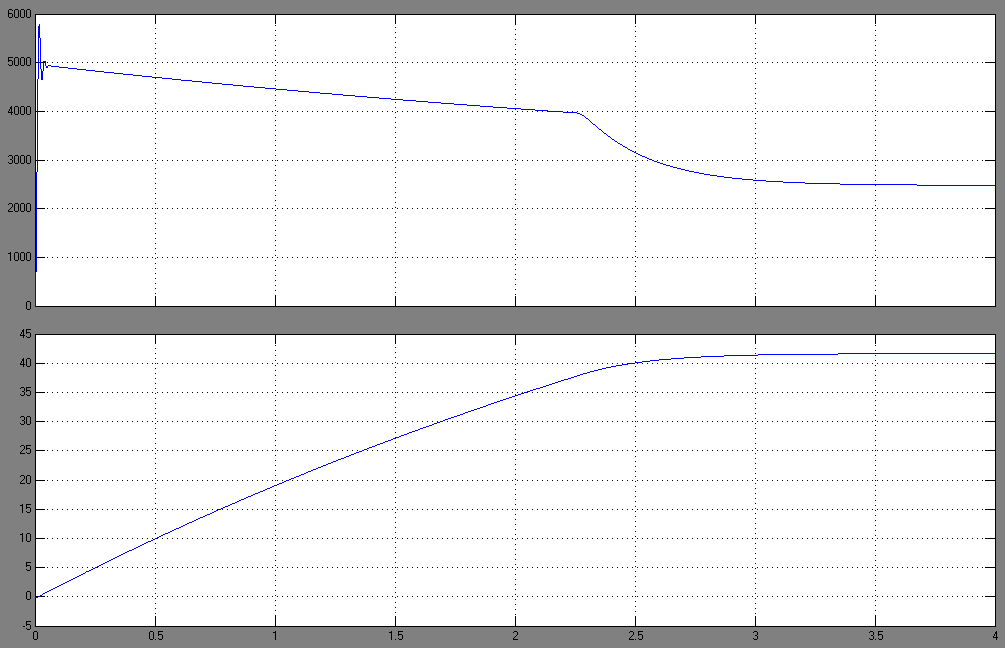
Графіки залежності струму якоря і швидкості від часу замкненої за швидкістю та струмом системи:
1.
Пуск:
а)
при
 і
і
 :
:
б)
при
 і
і
 :
:

2.
Скид завдання при
 і
і
 :
:

3.
Скид моменту при
 і
і
 :
:

7. Розробка і опис електричної принципової схеми системи електропривода
Відповідно
до вимог до електроприводу рудникового
підйому система його управління повинна
забезпечувати реверсування, безперервність
керування впродовж будь-якого циклу
руху, необхідну якість регулювання
таких основних параметрів як швидкість
 ,
струм
якоря
,
струм
якоря
 ,
струм
збудження
,
струм
збудження
 .
.
На
деяких підйомах застосовується
електропривод з реверсом
 при
роздільному керуванні
при
роздільному керуванні
 і
і
 з
імпульсом на реверсування
з
імпульсом на реверсування
 по
по
 або
по розузгодженню між заданою
(
або
по розузгодженню між заданою
( )
і
встановленою
(
)
і
встановленою
( )
швидкостями
з додатковим контролем по
)
швидкостями
з додатковим контролем по
 .
У
такому електроприводі на час реверсу
ТП закривається, внаслідок чого
електропривод виявляється некерованим
і працює в режимі вільного вибігу.
Виникаюче
при цьому відхилення
.
У
такому електроприводі на час реверсу
ТП закривається, внаслідок чого
електропривод виявляється некерованим
і працює в режимі вільного вибігу.
Виникаюче
при цьому відхилення
 від
від
 може
бути значним і неприпустимим за
технологією підйому.
Більш
якісне виконання вимог забезпечують
системи підлеглого керування (розробка
та дослідження будуть проведені в КП з
курсу СУЕП),
розроблені
для електроприводів рудникового підйому,
металургійних прокатних станів,
електроприводів загальнопромислового
призначення, які схожі за основними
функціональними елементами.
Такі
системи підлеглого керування з основною
структурою регулювання координат
містять
додатковий контур регулювання струму
збудження і блок статичних характеристик
(БСХ), що
дозволяє одночасно і погоджено керувати
струмом якоря і струмом збудження.
БСХ включає
БВМ (блок
виділення модуля)
і РО (регулятор
обмеження).
Основними
є ПІ-регулятори швидкості (РШ), струму
якоря (РС) і струму збудження (РСЗ).
Регулятор
РО забезпечує обмеження
може
бути значним і неприпустимим за
технологією підйому.
Більш
якісне виконання вимог забезпечують
системи підлеглого керування (розробка
та дослідження будуть проведені в КП з
курсу СУЕП),
розроблені
для електроприводів рудникового підйому,
металургійних прокатних станів,
електроприводів загальнопромислового
призначення, які схожі за основними
функціональними елементами.
Такі
системи підлеглого керування з основною
структурою регулювання координат
містять
додатковий контур регулювання струму
збудження і блок статичних характеристик
(БСХ), що
дозволяє одночасно і погоджено керувати
струмом якоря і струмом збудження.
БСХ включає
БВМ (блок
виділення модуля)
і РО (регулятор
обмеження).
Основними
є ПІ-регулятори швидкості (РШ), струму
якоря (РС) і струму збудження (РСЗ).
Регулятор
РО забезпечує обмеження
 .
У
схемі одночасне узгоджене управління
.
У
схемі одночасне узгоджене управління
 ,
,
 здійснюється
залежно від
здійснюється
залежно від
 ,
а
реверсування
,
а
реверсування
 ,
,
 – по
зміні знаку
– по
зміні знаку
 .
При
цьому оптимально узгоджене керування
.
При
цьому оптимально узгоджене керування
 і
і
 ,
оскільки
досягається безперервність зміни
величини і знаку
,
оскільки
досягається безперервність зміни
величини і знаку
 .
Цей
спосіб отримує розвиток при здійсненні
обов’язкового для підйому програмування
.
Цей
спосіб отримує розвиток при здійсненні
обов’язкового для підйому програмування
 у
циклі.
у
циклі.
Узгоджене
керування
 ,
,
 і
безперервне керування
і
безперервне керування
 може
бути здійснено по даній схемі.
Тоді
контуру
може
бути здійснено по даній схемі.
Тоді
контуру
 підпорядкований
контур
підпорядкований
контур
 ,
а
йому –
контур
,
а
йому –
контур
 .
Підсилювач
РО, що
обмежує
.
Підсилювач
РО, що
обмежує
 величиною
величиною
 ,
включений
після РСЗ.
При
,
включений
після РСЗ.
При
 и
и
 забезпечується
насичення
РО і
забезпечується
насичення
РО і
 .
.
У
всіх САК
електроприводів
ТП-Д з реверсом
 рудникового
підйому використовується зворотний
зв’язок за швидкістю за допомогою
тахогенератора, завдяки чому досягається
достатньо висока точність при визначенні
рудникового
підйому використовується зворотний
зв’язок за швидкістю за допомогою
тахогенератора, завдяки чому досягається
достатньо висока точність при визначенні
 і,
як наслідок, необхідного знаку
і,
як наслідок, необхідного знаку
 і
і
 ,
тобто
необхідного режиму роботи електропривода.
Недоцільно
застосовувати схеми реверсування
,
тобто
необхідного режиму роботи електропривода.
Недоцільно
застосовувати схеми реверсування
 ,
що базуються на непрямих методах
визначення
,
що базуються на непрямих методах
визначення
 із-за
значної неточності визначення
із-за
значної неточності визначення
 при
навантаженні в динамічних режимах.
при
навантаженні в динамічних режимах.

Рисунок
7.1 – Схема
системи керування параметрами
електроприводу ТП-Д з реверсом
 ,
по
структурі одночасного узгодженого
управління
,
по
структурі одночасного узгодженого
управління
 и
и

Процес
зміни
 ,
особливо
в електродвигунах з масивною станиною,
відрізняється
від процесу зміни
,
особливо
в електродвигунах з масивною станиною,
відрізняється
від процесу зміни
 ,
тому
при використанні
САК з
регулюванням
,
тому
при використанні
САК з
регулюванням
 при
реверсуванні вноситься помилка.
Для
її зменшення система може бути побудована
з підлеглим контуром керування
при
реверсуванні вноситься помилка.
Для
її зменшення система може бути побудована
з підлеглим контуром керування
 шляхом
введення в ланцюг зворотного зв’язку
по
шляхом
введення в ланцюг зворотного зв’язку
по
 функціонального
перетворювача, що моделює характеристику
намагнічування електродвигуна.
Проте
для рудникового підйому достатня
точність забезпечується при регулюванні
по
функціонального
перетворювача, що моделює характеристику
намагнічування електродвигуна.
Проте
для рудникового підйому достатня
точність забезпечується при регулюванні
по
 .
.
Електроприводи
ТП-Д з реверсом
 на
промислових підйомах зазвичай виконуються
по функціональній схемі
(рис.7.1). Програма
руху задається командоапаратом ручного
керування
КАР і
задатчиком інтенсивності ЗІ.
Зовнішній
контур регулювання – контур швидкості
з РШ, на
один вхід якого подається сигнал заданої
швидкості
на
промислових підйомах зазвичай виконуються
по функціональній схемі
(рис.7.1). Програма
руху задається командоапаратом ручного
керування
КАР і
задатчиком інтенсивності ЗІ.
Зовнішній
контур регулювання – контур швидкості
з РШ, на
один вхід якого подається сигнал заданої
швидкості
 від
КАР-ЗІ, а
на інший вхід
– сигнал
зворотного зв’язку по дійсній швидкості
від
КАР-ЗІ, а
на інший вхід
– сигнал
зворотного зв’язку по дійсній швидкості
 ,
що
знімається з тахогенератора
ТГ через
датчик швидкості ДШ.
,
що
знімається з тахогенератора
ТГ через
датчик швидкості ДШ.
Внутрішні
контури – контур регулювання струму
якоря
 і
контур регулювання струму збудження
і
контур регулювання струму збудження
 з
регуляторами
РС і РСЗ. У
схемі відбувається узгоджене керування
з
регуляторами
РС і РСЗ. У
схемі відбувається узгоджене керування
 і
і
 ,
контур
,
контур
 і
контур
і
контур
 підключаються
на вихід РШ і є підпорядкованими контуру
підключаються
на вихід РШ і є підпорядкованими контуру
 і
одночасно керованими залежно від знаку
і величини
і
одночасно керованими залежно від знаку
і величини
 .
.
Керування
 здійснюється
замкнутим контуром регулювання
здійснюється
замкнутим контуром регулювання
 з
регулятором
РСЗ, на
один вхід якого подається сигнал
з
регулятором
РСЗ, на
один вхід якого подається сигнал
 ,
задаючий
значення струму збудження
,
задаючий
значення струму збудження
 ,
на
інший вхід
– сигнал
зворотного зв’язку по дійсному
,
на
інший вхід
– сигнал
зворотного зв’язку по дійсному
 ,
що
знімається з шунта ланцюга збудження
– датчика струму збудження ДСЗ.
Сигнал,
що задає значення якірного струму
,
що
знімається з шунта ланцюга збудження
– датчика струму збудження ДСЗ.
Сигнал,
що задає значення якірного струму
 ,
подається
на один вхід
РТ, на
інший вхід – сигнал зворотного зв’язку
по
,
подається
на один вхід
РТ, на
інший вхід – сигнал зворотного зв’язку
по
 ,
що
знімається з шунта головного ланцюга
електроприводу – датчика струму якоря
ДС.
,
що
знімається з шунта головного ланцюга
електроприводу – датчика струму якоря
ДС.
Сигнал,
пропорційний заданому значенню
 ,
,
 при
зміні напряму обертання двигуна змінює
полярність.
Дійсний
струм
при
зміні напряму обертання двигуна змінює
полярність.
Дійсний
струм
 полярності
не змінює.
При
цьому якірний ланцюг двигуна повинен
керуватися однополярним сигналом,
оскільки в приводі ТП-Д з реверсом
полярності
не змінює.
При
цьому якірний ланцюг двигуна повинен
керуватися однополярним сигналом,
оскільки в приводі ТП-Д з реверсом
 використовується
нереверсивний силовий ТП. При
однонаправленому
використовується
нереверсивний силовий ТП. При
однонаправленому
 знак
сигналу завдання
знак
сигналу завдання
 на
вході РС
не
повинен змінюватися як у разі здійснення
гальмування, так і зміни напряму руху.
Цим
визначається особливість приводу ТП-Д
з реверсом
на
вході РС
не
повинен змінюватися як у разі здійснення
гальмування, так і зміни напряму руху.
Цим
визначається особливість приводу ТП-Д
з реверсом
 ,
що
полягає не тільки в забезпеченні
одночасного керування
,
що
полягає не тільки в забезпеченні
одночасного керування
 і
і
 ,
але
і в наявності додаткового пристрою
виділення модуля
,
але
і в наявності додаткового пристрою
виділення модуля
 ,
що
забезпечує незмінний знак сигналу
керування
,
що
забезпечує незмінний знак сигналу
керування
 ,
як
у випрямному, так і в інверторном режимах.
У
даній схемі функції цього пристрою
виконує блок статичних характеристик
(БСХ) у
функції
,
як
у випрямному, так і в інверторном режимах.
У
даній схемі функції цього пристрою
виконує блок статичних характеристик
(БСХ) у
функції
 ,
у
загальному випадку
реалізуючої завдання
,
у
загальному випадку
реалізуючої завдання
 .
.
У
блок статичних характеристик входять
пристрої: виділення модуля
 і
завдання номінального струму збудження
і
завдання номінального струму збудження
 .
Схема
пристрою виділення модуля складається
з двох паралельних ланцюгів.
По
одній з них
(
.
Схема
пристрою виділення модуля складається
з двох паралельних ланцюгів.
По
одній з них
( )
через
діод
)
через
діод
 подається
без зміни полярності на вхід РС для
керування
подається
без зміни полярності на вхід РС для
керування
 у
рушійному режимі.
По
іншому ланцюгу
(
у
рушійному режимі.
По
іншому ланцюгу
( )
через
)
через
 ,
підсилювач
РП1 зі
зміненим знаком на виході для збереження
незмінним
,
підсилювач
РП1 зі
зміненим знаком на виході для збереження
незмінним
 також
поступає на вхід РС для керування
також
поступає на вхід РС для керування
 у
інверторному режимі.
Пристрій
забезпечує також деяке випередження
робочої точки на характеристиці керування
при зростанні
у
інверторному режимі.
Пристрій
забезпечує також деяке випередження
робочої точки на характеристиці керування
при зростанні
 або
або
 для
збільшення
для
збільшення
 или
или
 .
.
У
блок статичних характеристик входить
також регулятор-обмежувач (РО),
у
зворотний зв’язок якого включені
стабілітрони
 ,
,
 .
РО призначений
для одночасного керування електроприводом
ТП-Д по каналах
.
РО призначений
для одночасного керування електроприводом
ТП-Д по каналах
 і
і
 ,
контур
,
контур
 керується
керується
 .
.