

Глава 16. Особенности построения мс с цифровой обработкой сигналов
16.1. ДОСТОИНСТВА ЦИФРОВЫХ МЕТОДОВ ОБРАБОТКИ
При цифровой обработке радиолокационных сигналов выборки сигнала, подлежащего обработке, преобразуются в цифровую форму—в числа, представленные в виде определенного кода. Чаще всего для этих целей используется двоичный код.
После преобразования аналог—код дальнейшая обработка сигналов (фильтрация и измерение координат) производится путем выполнении операций над числами с помощью цифровых устройств подобно тому, как это осуществляется в цифровой ЭВМ [48, 51].
Система цифровой обработки но существу представляет собой комбинацию аналого-цифрового преобразователя (АЦП) со специализированной цифровой ЭВМ, выполняющей операции в реальном масштабе времени.
Устройства цифровой обработки, реализованные на базе современной дискретной микроэлектроники, имеют целый ряд преимуществ перед аналоговыми:
большой динамический диапазон;
возможность гибкой и оперативной перестройки параметров фильтров, обеспечивающей более высокую адаптивность РЛС;
высокую стабильность характеристик фильтра;
возможность длительного накопления слабы* сигналов;
большую точность выполнения арифметических операций;
высокую надежность, малую массу и габариты;
возможность сопряжения систем обработки с цифровыми устройствами управления, что особенно важно в РЛС с ФАР.
Подчеркивая достоинства цифровых устройств, приведен следующий пример. Часто при обработке радиолокационных сигналов требуется задерживать их на время, кратное Тп (устройства че-респериодной компенсации ПП, редиркуляторы и т. д.). В классических устройствах эту функцию выполняют аналоговые линии задержки. В цифровых устройствах задерживаемый сигнал записывается в дискретное запоминающее устройство (ЗУ). и извлекается из него по мере надобности в более поздний мочен г4 времени. Таким образом он может храниться или задерживаться в течение длительных, но точно управляемых интервалов времени, в то время как обычные аналоговые линии задержки в общем случае уже
312
недостаточно стабильны для задержки импульсов на время 27"д пли ЗТп. В цифровых устройствах можно реализовать необходимые передаточные функции с задержкой сигналов на время, соответствующее большому числу периодов повторения.
Одним из наиболее существенных преимуществ цифровой обработки является то, что цифровая аппаратура в процессе эксплуатации не требует настройки, так как все весовые функции, используемые при вычислениях, п все задержки сохраняют заранее выбранные значения в течение любого сколь угодно большого времени. Вместе с тем цифровое преобразование сигналов неизбежно приводит к частичной потере информации, что делает цифровые алгоритмы обработки квазионтимальпыми. Работа цифровых фильтров сопровождается образованием дополнительных шумов, обусловленных необходимостью квантования сигналов (шум квантования) и неизбежного округления чисел при проведении вычислений (шум округления). Возникает также необходимость строби-рования входных сигналов но времени запаздывания (по дальности) и. доплеровской частоте, что. делает цифровые устройства многоканальными и приводит к усложнению аппаратуры и увеличению ее объема.
Однако несмотря на эти недостатки перспективность использования методов цифровой обработки сигналов несомненна, поскольку реально достижимая эффективность цифровых систем оказывается более высокой, чем аналоговых, а успехи современной микроэлектроники делают возможной их практическую реализацию.
Применение цифровых устройств в РЛС может преследовать две цели:
повышение эффективности и улучшение эксплуатационных свойств отдельных радиотехнических устройств в РЛС с оконечными устройствами аналогового типа (индикаторами);
обнаружение и измерение координат целей цифровыми методами с выдачей информации в цифровой форме на цифровую ЭВМ, сопряженную с РЛС.
Следует отметить, что функциональный состав и общая структура РЛС с цифровой обработкой сигналов практически те же, что и РЛС с аналоговой обработкой. Поэтому дальнейшее изложение посвящено главным образом особенностям построения системы цифровой обработки сигналов и ее элементов.
16.2. ОБОБЩЕННАЯ СТРУКТУРНАЯ СХЕМА СИСТШЫ ЦИФРОВОЙ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
В обзорных РЛС сигнал, отраженный от цели, имеет естественную дискретизацию по времени, обусловленную перемещением ди-'аграммы направленности РЛС в азимутальной плоскости и импульсным методом дальнометрии. Искусственной дискретизации
>. . , 313
по времени подвергается сигнал на выходе приемника РЛС в пределах одного цикла зондирования (в пределах интервала времени ^ггаах, где /,тах -максимальное время запаздывания отраженного сигнала). Это приводит к разбиению всей дальности на элементарные участки шириной &г. Число таких участков
![]()
где R — максимальная дальность обнаружения;
Дг — с7*д/2 — размер элементарного участка но дальности; Тя — интервал временной дискретизации.
— Ригиялм каждого участка квантуются по амплитуде, преобразуются в цифровую форму и запоминаются на время, необходимое для их обработки.
При вращении антенны по азимуту каждый элементарный участок образует так называемое кольцо дальности (капал дальности). При решении задач фильтрации полезных сигналов, обнаружения целей и измерения их координат используется информация с кольца дальности в пределах азимутального сектора, равного ширине диаграммы направленности антенны РЛС в горизонтальной плоскости. Информация в каждом кольце дальности обрабатывается от одного цикла зондирования к другому таким образом, чтобы к началу очередного цикла она заканчивалась па всех интервалах дальностей.
Обработка сигналов во всей зоне обзора РЛС возможна либо путем последовательного анализа информации на различных интерналах дальностей,./либо путем параллельного включения устройств обработки в каждое кольцо дальности. При первом способе требуется меньший объем аппаратуры, однако существенно (на 2 ... 3 порядка) возрастают требования к быстродействию. При параллельной обработке пропорционально числу дальномерных каналов /V,. уменьшается требования к быстродействию, но растет объем аппаратуры. Возможен также последовательно-параллельный способ обработки, обеспечивающий определенный компромисс между быстродействием и объемом аппаратуры. Выбор того пли иного способа зависит от многих факторов и определяется, с одной стороны, техническими параметрами РЛС, такими как база сигнала, число импульсов в пачке, требуемый коэффициент подавления помех к аппаратуре защиты, допустимый уровень потерь энергии полезных сигналов и т. д., а с другой стороны — наличием и уровнем развития элементной базы.
Следует отметить, что независимо от технической реализации в основе работы устройств линейной цифровой обработки лежит принцип весового (взвешенного) суммирования. Значения весовых коэффициентов определяют характеристики устройства обработки (импульсную, амплитудно-частотную и фазочастотиую) и выбираются таким образом, чтобы обеспечить оптимальную или квазидд-
314
тимальную фильтрацию полезных сигналов па фоне различного рода помех.
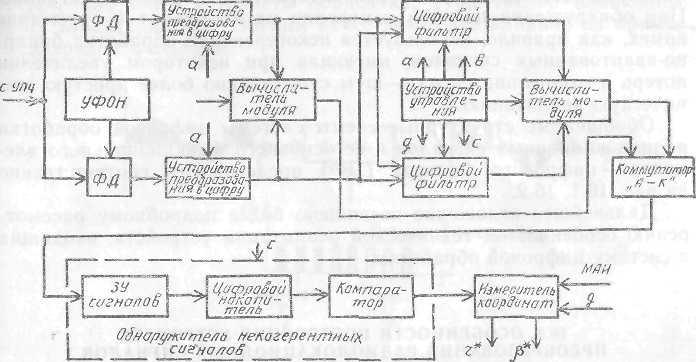
Рис. 1(5 1. Структурная схема системы цифровой обработки радиолокационных
сигналов

рис. Hi.2. Структурная схема цифрового фнлыра
Для реализации устройства цифровой обработки сигналов необходимо иметь:
запоминающее устройство (ЗУ) входных сигналов;
ЗУ весовых коэффициентов;
ЗУ выходных сигналов;
арифметическое устройство (АУ) для выполнения операций умножения значений сигнала на весовые коэффициенты и суммирования;
'" оперативное запоминающее устройство (ОЗУ) для храпения результатов промежуточных вычислений и команд;
устройство управления, обеспечивающее необходимую последовательность работы системы обработки.
315
Несмотря на сложность технической реализации, использование таких устройств в РЛС является обязательным и особенно в ап-паратуре защиты от помех при когерентной обработке сигналов. При обнаружении целей и измерении их координат в отсутствие помех, как правило, используется некогерентная обработка бинарно-квантованных сигналов, имеющая при некотором увеличении потерь в отношении сигнал—шум существенно более простую техническую реализацию.
Обобщенные структурные схемы системы цифровой обработки радиолокационных сигналов и ее основного функционального элемента — Цифрового фильтра (ЦФ) представлены соответственно па рис. 16.1, 16.2.
Дальнейшее изложение посвящено более подробному рассмотрению особенностей технической реализации устройств, входящих в систему цифровой обработки.
16.3- ОСОБЕННОСТИ ПОСТРОЕНИЯ УСТРОЙСТВ
ПРЕОБРАЗОВАНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ
В ЦИФРОВУЮ ФОРМУ