

5.8. Системы сдц с внутренней когерентностью на базе устройств чпк на радиочастоте
В системе СДЦ на радиочастоте (рис. 5.24), в отличие от системы СДЦ на видеочастоте УФОИ формирует колебания с частотой, не равной промежуточной. На выходе смесителя сохраняется вся информация о параметрах входных сигналов, в связи с чем
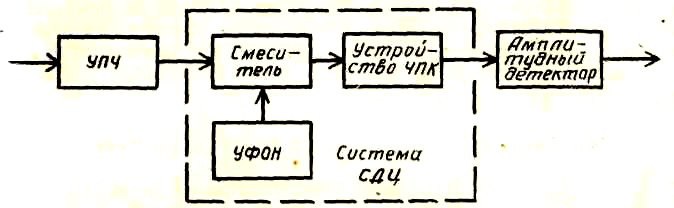
Рис. 5.24. Система СДЦ па радиочастоте
отпадает необходимость использования двух квадратурных каналов. Кроме того, при соответствующем выборе частоты опорных колебаний УФОН и смеситель обеспечивают перенос спектра сигналов в область рабочих частот УЛЗ. Однако к стабильности и точности настройки элементов устройства ЧПК, в первую очередь линии задержки, в данном случае предъявляются гораздо более жесткие требования, чем к аналогичным элементам систем СДЦ на видеочастоте. При наличии временного рассогласования задерживающего и прямого каналов коэффициент корреляции сигналов на входах схемы вычитания устройства ЧПК можно представить в виде
![]()
где
![]() — амплитудное
значение коэффициента корреля-
— амплитудное
значение коэффициента корреля-
ции сигналов на входах схемы вычитания;
![]() —
несущая частота
сигналов на входе устройства ЧПК;
—
несущая частота
сигналов на входе устройства ЧПК;
![]() —
временное рассогласование задерживающего
и прямого
каналов.
—
временное рассогласование задерживающего
и прямого
каналов.
Если
временное рассогласование каналов
значительно меньше времени
корреляции сигналов, то
![]() ,
и предель-
,
и предель-
но достижимый коэффициент подавления сигналов ПП
![]()
При
малых значениях произведения
![]() последнее
соотноше-
последнее
соотноше-
ние упрощается:
![]() (5.36)
(5.36)
Из (5.36) можно определить требования к допустимому временному рассогласованию задерживающего и прямого каналов в устройстве ЧПК на радиочастоте:
![]() (5.37)
(5.37)
Из
сопоставления условии (5.37) и (5.33) следует,
что при переходе
с
видеочастоты
на радиочастоту требования к стабильности
задержки в УЛЗ (или потенциалоскопе)
возрастают примерно
в
![]() раз.
Так, если
раз.
Так, если
![]() =
2 мкс,
а
=
2 мкс,
а
![]() =
30 МГц, то требования
к стабильности возрастают в 60 раз. Для
снижения требований
нужно уменьшать
=
30 МГц, то требования
к стабильности возрастают в 60 раз. Для
снижения требований
нужно уменьшать
![]() или
использовать схемы автоматической
подстройки времени задержки УЛЗ. Нижнее
значение
или
использовать схемы автоматической
подстройки времени задержки УЛЗ. Нижнее
значение
![]() определяется
условием неискаженного переноса спектра
сигналов на
вход устройства ЧПК.
определяется
условием неискаженного переноса спектра
сигналов на
вход устройства ЧПК.
5.9. Системы сдц с внешней когерентностью
5.9.1. Система сдц с некогерентной компенсацией пп
В отличие от системы с внутренней когерентностью в системах СДЦ с внешней когерентностью не требуется применения специальных схем компенсации ветра. Это одно из основных достоинств систем с внешней когерентностью, причем это достоинство связано не столько с упрощением системы, сколько с отсутствием необходимости настройки схемы компенсации скорости ветра, что особенно важно в обзорных РЛС.
На выходе амплитудного детектора системы СДЦ с некогерентной компенсацией ПП (рис. 5.25), огибающая сигналов ПП сравнительно медленно флюктуирует от зондирования к зондированию вследствие взаимного перемещения источников ПП в каждом импульсном объеме. Если внутри некоторых импульсных объемов имеются быстроперемещающиеся относительно источников ПП цели, то появляются значительно более быстрые флюкту-
ации. Поэтому, после череспериодного вычитания можно обнаружить сигналы целей на фоне некомпенсированных остатков помехи. Таким образом, благодаря одновременному приходу сигналов, отраженных от цели и источников ПП, находящихся в том же импульсном объеме, что и цель, амплитудный детектор приоб-

Рис. 5.25. Система СДЦ с некогерентной компенсацией сигналов ПП
ретает свойства фазочувствительного детектора. Опорным напряжением для него оказывается сигнал ПП. Поскольку фазы этого и отраженного сигналов одинаково зависят от начальной фазы колебаний зондирующего импульса, последняя не влияет на скорость флюктуаций амплитуды сигнала на выходе детектора. Кажущаяся скорость флюктуаций зависит лишь от разности радиальных скоростей цели и источников ПП.
Условие слепых скоростей для систем СДЦ с внешней когерентностью имеет вид
![]()
где
![]() —разность
радиальных скоростей
—разность
радиальных скоростей
перемещения
цели и источников ПП;
![]() —
целое число.
—
целое число.
В системах СДЦ с некогерентной компенсацией необходимо обеспечить большой динамический диапазон приемного тракта, так как в противном случае можно потерять полезные амплитудные флюктуации на выходе детектора. Для расширения динамического диапазона тракта можно использовать УПЧ с линейно-логарифмической характеристикой.
Основной недостаток системы связан с тем, что для обнаружения движущихся целей необходимо наличие источников ПП в том же импульсном объеме, что и цель. При отсутствии отражений от источников ПП сигналы целей могут быть подавлены в устройстве ЧПК. Для исключения возможности потери цели на участках пространства, свободных от ПП, в схему вводится устройство анализа помехи и коммутатор режимов работы. При отсутствии ПП на индикатор подается напряжение не с выхода устройства ЧПК, а непосредственно с детектора. Линия задержки в схеме предназначена для компенсации задержки сигнала, уп-
равляющего коммутатором режимов, относительно момента изменения помеховой обстановки на входе приемника (имеется в виду появление или исчезновение сигналов ПП).