

12.2.3. Инструментальная ошибка измерения дальности
Составляющими инструментальной ошибки измерения дальности являются:
ошибка за счет изменения времени запаздывания сигнала при прохождении через приемный тракт;
ошибка съема координат.
Ошибка за счёт изменения времени запаздывания в приёмном тракте имеет систематическую и случайную составляющие. Систематическая составляющая обусловлена конечным значением полосы пропускания усилительных каскадов (главным образом УПЧ), что приводит к растягиванию фронтов и задержке сигналов. Время запаздывания в приёмном тракте РЛС обычно составляет величину tзап пр = = (0,3...3)τи. Оно может быть скомпенсировано путём соответствующей расстановки импульсов запуска оконечного устройства.
Случайная составляющая времени задержки обусловлена изменением полосы пропускания каскадов из-за изменения их режимов работы вследствие нестабильностей источников питания, ухода параметров элементов под действием дестабилизирующих факторов, старения деталей и т. д. Среднее квадратическое значение нестабильности времени запаздывания составляет σt зап = 0,1 ...0,2 мкс, что соответствует ошибке измерения дальности 15…30 м.
Ошибка, возникающая при съёме координат, зависит от вида съёма.
При визуальном съёме она обусловлена:
неточностью формирования масштабных отметок дальности (МОД);
неточностью определения центра отметки;
интерполяцией положения центра отметки относительно МОД.
Для исключения ошибок измерения дальности, связанных с нелинейностью развертки индикатора, осуществляют электрическую калибровку шкалы дальности путём формирования МОД различных градаций. Обычно устройство формирования МОД выполняется по структурной схеме (рис. 12.1). С приходом импульса запускa генератор прямоугольных импульсов формирует импульс с длительностью, равной времени прямого хода развертки индикатора. В течение этого времени задающий генератор генерирует непрерывные колебания с частотой f0, которые затем ограничиваются, дифференцируются и используются для запуска формирователя.
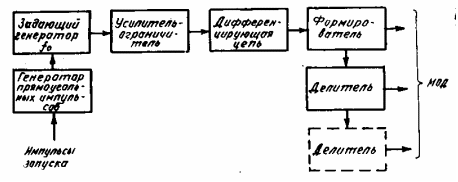
Рис. 12.1. Устройство формирования масштабных отметок дальности
Последний формирует МОД, представляющие собой видеоимпульсы с длительностью 1...2 мкс и периодом повторения Т0, определяющим минимальную градацию МОД (расстояние в километрах между масштабными отметками): Δrшк = сТ0/2 = с/2f0. Для удобства отсчёта путём последующего деления формируются МОД больших градаций. Нестабильность частоты задающего генератора приводит к смещению МОД на развертке индикатора и, следовательно, к ошибке измерения дальности, обусловленной неточностью формирования МОД. Эта ошибка σRМОД = rσj /f0 , где σj —полуширина спектра флюктуации колебании задающего генератора.
При переходе от σj к долговременной относительной нестабильности частоты δf = Δfmax/f0 = 3σf /f0,
σRМОД = rδf /3 (12.13)
Расчеты по формуле (12.13) показывают, что требования к стабильности частоты задающего генератора, при которых влиянием ошибки формирования МОД можно пренебречь, достаточно жесткие и диктуют необходимость использования специальных схем генераторов: с контуром ударного возбуждения или с кварцевой стабилизацией.
Максимальное значение ошибки за счет неточного определения центра отметки составляет половину отметки
![]()
(12.14)
где mR = ΔR/Lpr — масштаб по дальности;
ΔR — диапазон дальностей, выносимых на индикатор;
Lpr — длина развертки дальности;
dл — диаметр луча ЭЛТ.
Среднее квадратическое значение ошибки определения центра отметки
(12.15)![]()
Эта ошибка в РЛС с ИКО составляет 200 ... 300 м. Для её уменьшения необходимо использовать ЭЛТ с высоким качеством Qтр = Dтр/dл (здесь Dтр — диаметр экрана трубки), а также специальные индикаторы типа азимут—дальность (НАД) или специальные режимы ИКО: кольцевой (с задержкой начала развертки) или секторный (со смещением центра на край экрана).
Ошибка интерполяции при использовании электрической шкалы
![]()
Она может быть довольно значительной для её снижения необходимо предусматривать более мелкие градации МОД (Δrшк = 1 ...2 км).
Суммарная ошибка измерения дальности, обусловленная визуальным съёмом:
![]()
(12.16)
При автоматическом съёме дальность измеряется по номеру канала дальности N, в котором находится сигнал цели
r* = NΔr,
где Δr — диапазон дальностей, перекрываемых одним дальностным каналом.
Причинами возникновения ошибки съёма дальности в этом случае являются дискретизация по дальности и нестабильность частоты повторения импульсов дискретизации Fд.
Ошибка дискретизации определяется соотношением
![]()
(12.17)
а ошибка, обусловленная нестабильностью Fд, по аналогии с (12.13)
![]()
(12.18)
С учетом (12.17), (12.18)
![]()
(12.19)
Для уменьшения этой ошибки необходимо увеличивать частоту дискретизации и повышать её стабильность, используя генераторы импульсов с кварцевой стабилизацией. Однако следует помнить, что увеличение Fд связано с увеличением числа каналов дальности и, следовательно, аппаратурных затрат.
При полуавтоматическом съёме оператор совмещает электронный маркер с центром отметки, после чего нажимает кнопку съёма и координаты цели в кодированном виде поступают в канал связи с потребителем радиолокационной информации.
Ошибка измерения дальности при этом обусловлена:
неточностью определения центра отметки (см. (12.15));
неточностью совмещения маркера с центром отметки;
дискретностью представления дальности (см. (12.17)).
Ошибка, обусловленная неточностью совмещения маркера, определяется соотношением
σR МАРК = mR dМАРК /3, где dМАРК — диаметр маркера (обычно dМАРК = dл).
Суммарная ошибка
съёма ![]()
(12.20)
Для уменьшения этой ошибки необходимо принимать такие же меры, как при визуальном и автоматическом съёме.