

5.7. Система сдц с эквивалентной
ВНУТРЕННЕЙ КОГЕРЕНТНОСТЬЮ НА БАЗЕ УСТРОЙСТВ ЧЕРЕСПЕРИОДНОЙ КОМПЕНСАЦИИ (ЧПК) НА ВИДЕОЧАСТОТЕ
5.7.1. Структурная схема системы сдц
Структурная схема системы СДЦ с эквивалентной внутренней когерентностью на базе устройств ЧПК на видеочастоте для РЛС, в которой осуществляется некогерентное накопление отраженных сигналов, представлена на рис. 5.9. Фазовые детекторы (ФД) и схема формирования опорного напряжения, входящие в состав когерентно-импульсного устройства, обеспечивают перенос спектра входных сигналов в область видеочастот и когерентность импульсов в пачке на входе устройства ЧПК. Когерентность проявляется в закономерном изменении амплитуды и полярности видеосигналов на выходе ФД.
Устройство ЧПК выполняет роль режекторного фильтра. Двухполупериодный выпрямитель обеспечивает преобразование бипо-
лярных сигналов с выхода устройства ЧПК в однополярные перед суммированием сигналов двух квадратурных каналов и подачей их на накопитель.
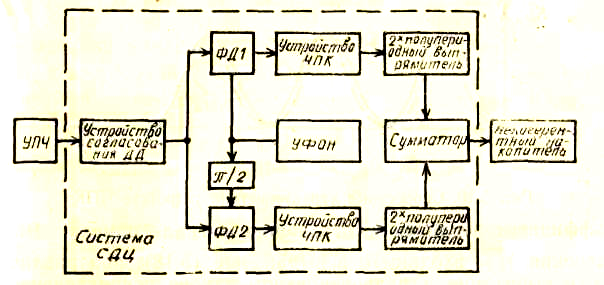
Рис. 5.9. Система СДЦ с внутренней когерентностью на видеочастоте
Наличие двух квадратурных каналов исключает возможность потери полезного сигнала за счет незнания его начальной фазы.
Кроме основных устройств в состав системы СДЦ может входить также устройство согласования динамических диапазонов (ДД). Это устройство исключает перегрузку системы СДЦ и последующих элементов приемного тракта, что обеспечивает возможность работы РЛС в условиях нестационарных ПП.
5.7.2. Основные характеристики системы
Скоростная
характеристика. Скоростная
характеристика системы
СДЦ зависит от кратности вычитания
сигналов, которая определяется
числом последовательно включенных
устройств ЧПК.
Соотношения, определяющие зависимости
![]() при
различной
кратности вычитания, приведены в табл.
5.1.
при
различной
кратности вычитания, приведены в табл.
5.1.
Т а б л и ц а 5.1
|
Кратность вычитания
|
Соотношения |
|||
|
|
|
|
|
|
|
Однократное Двукратное Трехкратное |
|
|
2
6
20 |
0,5
0,375
0,3125 |
На
рис. 5.10 графически изображены зависимости
нормированного коэффициента передачи
сигнала от доплеровской поправки частоты
![]() при
однократном и двукратном череспериодном
вы-
при
однократном и двукратном череспериодном
вы-
читании
сигналов. Из рисунка видно, что
увеличение кратности вычитания приводит
к расширению зоны слепых скоростей.
Коэффициент
улучшения отношения сигнал—помеха.
Числовые
значения
![]() входящего
в выражение (5.18), при различной кратности
вычитания и
равновероятном
законе распределения вероятностей
радиальных скоростей цели, приведены
в табл. 5.1.
входящего
в выражение (5.18), при различной кратности
вычитания и
равновероятном
законе распределения вероятностей
радиальных скоростей цели, приведены
в табл. 5.1.
Значение коэффициента подавления сигналов ПП зависит от кратности вычитания и от значений коэффициентов междупериодной корреляции сигналов ПП.
Соотношения,
определяющие
![]() в
системах СДЦ на базе
в
системах СДЦ на базе
устройств ЧПК, приведены в табл. 5.2.
Таблица 5.2
|
Кратность вычитания
|
Соотношения для
|
|
Однократное Двукратное Трехкратное |
|
При колокольной аппроксимации энергетического спектра флюктуаций ПП выражение для коэффициента междупериодной корреляции сигналов ПП на входах схемы вычитания устройства ЧПК имеет вид
![]()
где
![]() —
полуширина спектра флюктуации ПП с
учетом всех декоррелирующих
факторов;
—
полуширина спектра флюктуации ПП с
учетом всех декоррелирующих
факторов;
![]() —
разность частот
сигналов, отраженных
от источников ПП, и опорного напряжения.
—
разность частот
сигналов, отраженных
от источников ПП, и опорного напряжения.
При
скомпенсированной скорости ветра![]() =0
и выражение
=0
и выражение
для коэффициента междупериодной корреляции упрощается:
![]()
При малых значениях показателя степени последнее выражение можно записать
![]() (5.19)
(5.19)
Подставив
упрощенные выражения соответствующих
коэффициентов
корреляции сигналов ПП в общие соотношения
для
![]() с
учетом выражения (5.19), получим упрощенные
формулы для расчета
коэффициента подавления сигналов ПП
при скомпенсированной скорости ветра
и колокольной аппроксимации энергетического
спектра флюктуации сигналов ПП:
с
учетом выражения (5.19), получим упрощенные
формулы для расчета
коэффициента подавления сигналов ПП
при скомпенсированной скорости ветра
и колокольной аппроксимации энергетического
спектра флюктуации сигналов ПП:
![]()
![]()
![]()
С учетом (5.18) соотношения, определяющие значения коэффициента улучшения при различной кратности вычитания, будут иметь вид
![]() (5.20)
(5.20)
![]() (5.21)
(5.21)
![]() (5.22)
(5.22)
Из
приведенных соотношений видно, что при
всех прочих равных
условиях увеличение кратности вычитания
приводит к увеличению
![]() .
Однако в общем случае это утверждение
несправедливо.
Так, например, в случае, когда форма
огибающей корреляционной
функции флюктуаций ПП близка к
экспоненциальной (энергетический
спектр флюктуаций аппроксимируется
выражением
.
Однако в общем случае это утверждение
несправедливо.
Так, например, в случае, когда форма
огибающей корреляционной
функции флюктуаций ПП близка к
экспоненциальной (энергетический
спектр флюктуаций аппроксимируется
выражением
![]() ,
увеличение кратности вычитания
не приводит к увеличению
,
увеличение кратности вычитания
не приводит к увеличению
![]() .
.
Коэффициент
изменения потерь. Числовое
значение коэффициента
![]() зависит
от технической реализации устройств
ЧПК и
составляет в среднем 3...5 дБ. Последняя
цифра относится
к системам СДЦ, у которых устройство
ЧПК выполнено на потенциалоскопах.
зависит
от технической реализации устройств
ЧПК и
составляет в среднем 3...5 дБ. Последняя
цифра относится
к системам СДЦ, у которых устройство
ЧПК выполнено на потенциалоскопах.
Если
в системе СДЦ на видеочастоте используется
только один канал,
то коэффициент
![]() дополнительно
увеличивается примерно
на 2 дБ.
дополнительно
увеличивается примерно
на 2 дБ.