

9.7.2. Рециркулятор на базе ультразвуковой линии задержки
В рециркуляторе на базе УЛЗ (рис. 9.20) включение ограничителя перед интегратором достигает двух целей: во-первых, единичные импульсные помехи не создают на выходе рециркулятора заметного отклика и, во-вторых, сильные сигналы не выходят за границы динамического диапазона цепей рециркулятора, что привело бы их к перегрузке. Кварцевый гетеродин и модулятор обеспечивают перенос спектра интегрируемых видеосигналов в диапазон рабочих частот УЛЗ (см. §5.7).

Рис. 9.20. Рециркулятор на УЛЗ
Обеспечение устойчивости является одной из главных мер при практической реализации рециркуляторов. Необходимое и достаточное условие устойчивое рециркулятора —выполнение неравенства
![]()
(9.14)
αi — коэффициент дополнительного ослабления i-го паразитного отражения в УЛЗ.
Изготовляемые в настоящее время УЛЗ имеют сравнительно высокий уровень паразитных отражений, достигающий в ряде случаев величины порядка 0,03 ... 0,05. Поэтому уже при числе импульсов в пачке, равном 10, запас устойчивости рециркулятора, как это следует из (9.12), (9.14), составляет около 0,1. Это означает, что допустимая нестабильность коэффициента усиления цепи задержанной обратной связи в сторону его увеличения не должна превышать 10 % от номинального значения. Уменьшение же коэффициента усиления цепи обратной связи может привести к возрастанию потерь Lи нак. Так, например, изменение β с 0,9 до 0,8 приводит к возрастанию коэффициента потерь Lи нак на 0,5 дБ. Для устранения возможности как самовозбуждения, так и снижения эффективности рециркулятора применяют автоматическую регулировку усиления цепи обратной связи. Наиболее эффективной является схема импульсной дифференциальной АРУ, где амплитуда входного контрольного видеоимпульса сравнивается с амплитудой ослабленного в (1 – β0)-1 раз накопленного импульса (β0 — номинальное значение коэффициента обратной связи). При нормальной работе эти амплитуды одинаковы. Отклонение β от номинального значения изменяет величину накопленного сигнала, ввиду чего равенство амплитуд нарушается. При этом на выходе вычитающего устройства схемы ДАРУ вырабатывается напряжение, которое интегрируется и используется для управления величиной коэффициента усиления усилителя радиочастоты (УРЧ).
Схема ДАРУ работает в специально выделенном временном канале (либо в начале дистанции, либо в конце), свободном от действия выходных сигналов приёмника. Временной канал выделяется путём подачи управляющих импульсов на временные селекторы в моменты поступления на вход рециркулятора контрольных импульсов.
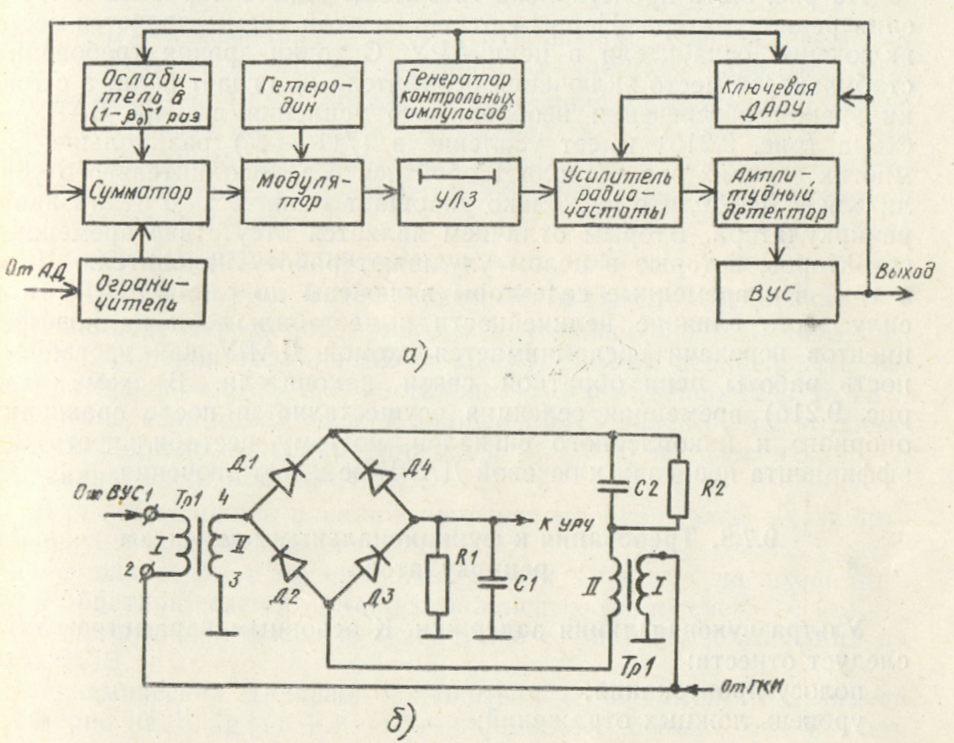
Рис. 9.21. Рециркулятор на УЛЗ с ключевой ДАРУ: а — структурная схема:
б — принципиальная схема ключевой ДАРУ
Усилитель радиочастоты предназначен для компенсации ослабления сигнала в УЛЗ. В нём должны быть предусмотрены каскады, обеспечивающие возможность регулировки коэффициента усиления в заданном динамическом диапазоне с требуемой точностью.
Сумматор предназначен для амплитудного суммирования накапливаемых сигналов, а также для введения в рециркулятор контрольных импульсов.
На рис. 9.21 а представлена схема ещё одного варианта построения рециркулятора. Первым отличием этой схемы является место включения ослабителя в цепи АРУ. С точки зрения требований стабильности место включения ослабителя не играет роли, а с точки зрения обеспечения необходимого усиления в цепи ДАРУ — схема (рис. 9.216) имеет усиление в 1/(1 — β0) Раз больше. Во многих случаях это позволяет обойтись без дополнительного усилителя в ДАРУ, что несколько упрощает техническую реализацию рециркулятора. Вторым отличием является отсутствие временных селекторов, которые в целом ухудшают работу накопителя. Дело в том, что временные селекторы включены до схемы ДАРУ к в силу этого влияние нелинейности и нестабильности их коэффициентов передачи воспринимается схемой ДАРУ как нестабильность работы цепи обратной связи накопителя, В схеме (см. рис. 9.21б) временная селекция осуществляется после сравнения опорного и накопленного сигналов, поэтому нестабильность коэффициента передачи ключевой ДАРУ не имеет значении.