

9.7. Принципы построения рециркуляторов
9.7.1. Общие сведении о рециркуляторах
Амплитудно-частотная характеристика рециркулятора определяется соотношением
![]()
![]()
где — коэффициент обратной связи.
![]()
Графики для нескольких значений коэффициента обратной связи представлены па рис. 9.18.
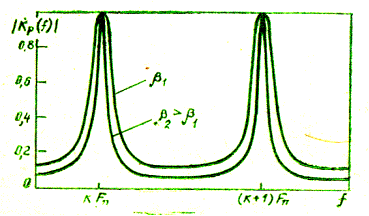
Рис. 9.18. Амплитудно-частотная характеристика рециркулятора
Неоптимальность частотной характеристики рециркулятора приводит к появлению потерь, числовое значение которых зависит от числа импульсов в пачке, формы огибающей пачки, коэффициента обратной связи, а также от того, стирается ли содержание, накопленное в рециркуляторе, после прихода М импульсов пачки или интегратор работает непрерывно без стирания информации [35].
Рециркулятор со стиранием по эффективности близок к линейному накопителю, однако он не получил на практике распространения, так как кроме радиолокатора со ступенчатым обзором можно назвать немного случаев, когда заранее известно, в какой момент времени интегратор готов к стиранию содержащейся в нем информации. При использовании в качестве накопителя рециркулятора непрерывного действия коэффициент потерь
![]()
График этой зависимости приведен на рис. 9.19а.

Рис. 9.19. Потери в рециркуляторе непрерывного действия: а—зависимость от коэффициента обратной связи и числа импульсов; б — чувствительность к изменениям коэффициента обратной связи
Для пачки с прямоугольной огибающей потери в рециркуляторе за счет его неоптимальности как накопителя будут минимальными (Lи нак = 1дБ), если
![]()
(9.12)
В случае пачки с колокольной огибающей минимальные потери (Lи нак = 2дБ) обеспечиваются при коэффициенте обратной связи
![]()
(9.13)
Точное значение коэффициента обратной связи не является критичным. На рис. 9.19б показаны границы допусков на коэффициент, обратной связи при допустимом увеличении потерь Lи нак на 0,1 дБ по сравнению с минимально возможным значением.
В качестве устройства задержки в рециркуляторах могут использоваться потенциалоскопы, ультразвуковые линии задержки, магнитные барабаны или диски. Завись сигналов на магнитный барабан (диск) сопряжена с механическим перемещением магнитного носителя относительно записывающих и считывающих головок. Скорость этого перемещения должна поддерживаться с весьма высокой точностью, что оказывается затруднительным на практике. Кроме того, при записи на магнитный материал и на мишень потенциалоскопа возникают специфические искажения: растяжение записываемого импульса по длительности, засорение соседних участков экрана вторичными электронами. При этом ухудшается разрешающая способность РЛС и возрастает уровень помех.
Эти особенности и должны приниматься во внимание при определении целесообразности использования тех или иных аналоговых устройств задержки. Лучшие качественные показатели рециркулятора обеспечиваются при использовании ультразвуковых линий задержки.