

6.4.4. Уменьшение уровня приёма в направлениях на постановщики активных помех
Для снижения уровня помех, приходящих с направлений, не совпадающих с направлением на источник сигнала, можно использовать компенсационный метод, принцип которого заключается в следующем. Приёмная антенная система состоит из основной А0 и дополнительных антенн А1, А2, …, Аn (рис. 6.10а). В каждом из дополнительных каналов приёма включаются усилители с

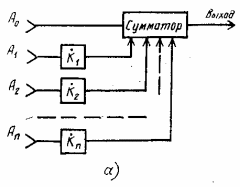
Рис. 6.10. Многоканальная система обработки сигналов: а - обобщенная схема; б — на базе автокомпенсаторов
регулируемыми комплексными коэффициентами передачи . Колебания, прошедшие через соответствующие каналы, поступают на сумматор. Результирующая диаграмма направленности такой антенной системы определяется соотношением
![]()
где - диаграмма направленности антенны i-го канала.
Путём подбора коэффициентов можно добиться образования провалов в результирующей диаграмме направленности в направлении на ПАП при несущественном искажении главного лепестка диаграммы. Для формирования провалов в заданных направлениях коэффициенты передачи должны удовлетворять следующей системе уравнений:
![]()
(6.6)
При эта система уравнений будет иметь по крайней мере одно решение, если выбраны с учётом требований, о которых будет сказано ниже. При в общем случае система уравнений не будет иметь решения. Последнее означает, что для формирования в результирующей диаграмме направленности провалов на N постановщиков активных помех необходимо иметь в общем случае не менее N дополнительных каналов приёма со своими антеннами.
Для автоматического формирования провалов в результирующей диаграмме направленности можно использовать автокомпенсаторы [42]. Обобщенная структурная схема устройства обработки выходных сигналов приёмных каналов при применении автокомпенсаторов приведена на рис. 6.10б.
Предельно достижимый
(потенциальный) коэффициент подавления
АШП в такой системе (см. (5.55)).![]()
Где Рпо - мощность АШП на входе основного канала АК;
Рп вых АК - мощность АШП на выходе автокомпенсатора;
Д00 - алгебраическое дополнение элемента ρоо= 1 корреляционной матрицы входных помеховых сигналов.
В простейшем случае при п = 1 (один дополнительный канал приёма)
![]()
(6.7)
где - модуль коэффициента взаимной корреляции АШП на входах основного и дополнительного канала АК.
Принципы построения АК активных помех в основном аналогичны принципам построения АК пассивных помех. Однако специфика работы АК активных помех обусловливает ряд дополнительных требований к функциональным узлам и элементам аппаратуры защиты от активных помех на базе автокомпенсаторов. Ниже будут рассмотрены основные из этих требований и способы их обеспечения.
1) Требование к идентичности задержек сигналов в основном и дополнительном каналах приёма. Наличие временного рассогласования каналов приёма приводит к снижению коэффициента взаимной корреляции сигналов АШП на входах АК, а следовательно, и коэффициента подавления.
Требование к допустимому относительному временному сдвигу сигналов на входах сумматора АК определяется теми же соображениями, что и в ЧПАК (см. 5.56).
(6.8)![]()
2) Требование к чувствительности дополнительного канала приема. Модуль коэффициента взаимной корреляции сигналов на входах АК с учетом собственных шумов приемных каналов

Где R01п - модуль коэффициента взаимной корреляции АШП (без учета собственных шумов приёмных каналов); qп0 = Рпо/Ршо, qп1 = Рп1/Рш1 - отношение мощности АШП к мощности собственных шумов для соответствующего приёмного канала.
При записи (6.9) учтено, что коэффициент взаимной корреляции собственных шумов приёмных каналов равен нулю.
После подстановки значения R 01 в выражение (6.7) получаем
![]()
(6.10)
На рис. 6.11 представлено семейство зависимостей коэффициента подавления мешающих шумов от значений qпо и qп1 для случая, когда R01п = 1.
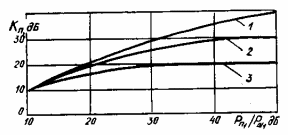
Рис. 6.11. Зависимость коэффициента подавления АШП от отношения помеха – шум в каналах приёма: 1 – при qпо = 40 Дб; 2 – при qпо = 30 Дб; 3 – при qпо = 20 Дб.
Из анализа зависимостей можно сделать вывод; что чувствительность дополнительных каналов приёма должна быть во всяком случае не ниже чувствительности основного канала приёма. Это требование обеспечивается путём включения в дополнительный канал до входа АК тех же элементов, что и в основной (УВЧ, смеситель, ПУПЧ).
-
Требования к коэффициенту усиления антенн дополнительных каналов приёма. Отношение мощности АШП к мощности собственных шумов дополнительного канала приёма можно представить в виде

(6.11)
где Рп - мощность АШП на входе дополнительного канала приёма при условии, что коэффициент усиления антенны равен единице.
G д (Θп) - коэффициент усиления антенны дополнительного канала приёма в направлении на ПАП.
Из соотношения (6.11) видно, что значение параметра qп1 при фиксированной мощности собственных шумов приёмного канала можно увеличить путем увеличения коэффициента усиления антенны дополнительного канала приёма. Это означает, что для получения больших значений Кп необходимо использовать в дополнительных каналах приема остронаправленные антенны.
Выполнение подобного требования связано с увеличением размеров антенны, что не всегда допустимо. Поэтому следует считать вполне приемлемым выполнение условия
![]()
Где Gбок max - максимальный коэффициент усиления антенны основного канала по боковым лепесткам диаграммы.
Дальнейшее увеличение коэффициента усиления G д сравнительно слабо влияет на рост Кп (см. рис. 6.11).
-
Требования к диаграммам, направленности антенн дополнительных каналов приёма. Чтобы система уравнений (6.6) была невырожденной (т. е. чтобы она имела решение), антенны дополнительных каналов приёма должны иметь различные либо амплитудные, либо фазовые диаграммы направленности. Из-за сравнительно низкой направленности этих антенн реализация амплитудных различий представляет собой достаточно сложную задачу. Проще реализовать отличие фазовых диаграмм. Для этого достаточно разнести фазовые центры антенн дополнительных каналов приёма (рис. 6.12).

Рис. 6.12. К вопросу обеспечения требований к диаграммам направленности
антенн дополнительных каналов приёма
Следует, однако, помнить, что разнос фазовых центров антенн приводит к возникновению относительного временного сдвига сигналов АШП на входах приёмных каналов и, следовательно, к снижению реализуемого коэффициента подавления. Этот сдвиг можно оценить по формуле
![]()
где d — расстояние между фазовыми центрами антенн.
Значение δtфц входит в левую часть (6.8) в качестве одной из составляющих.
5) Требование к быстродействию. Динамическая постоянная АК должна удовлетворять условию
![]()
Выполнение левого неравенства исключает возможность ослабления полезного сигнала и повышает запас устойчивости АК. Выполнение правого неравенства обеспечивает возможность компенсации относительных амплитудных и фазовых изменений сигналов АШП на входах каналов приёма, обусловленных вращением антенны РЛС.
Автокомпенсатор активных помех работает в условиях изменения мощности помехи на его входах в большом диапазоне (десятки децибел). Эта особенность вызывает необходимость Принятия мер по обеспечению требуемого быстродействия АК при малых уровнях помеховых сигналов и исключения самовозбуждения при больших.
Как уже отмечалось (см. 5.10.2), такими мерами являются включение в цепь обратной связи АК усилителя-ограничителя или усилителя с ШАРУ.
В первом случае
усилитель, предшествующий ограничителю,
должен иметь такой коэффициент усиления,
чтобы после ограничения уровень сигнала
обеспечивал заданную скорость настройки
АК.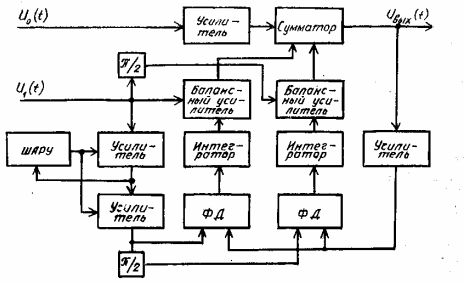
Рис. 6.13. Квадратурный АК с ШАРУ в цепи обратной связи
Во втором случае (рис. 6.13) схема ШАРУ должна обеспечивать регулирование как назад, так и вперёд, для того, чтобы обеспечить изменение результирующего коэффициента усиления регулируемых усилителей, а следовательно, и коэффициента обратной связи Koс обратно пропорционально мощности помехи на входе дополнительного канала АК.