

Тема 5. (8 ч., срс 5 ч.)
5. Типовые схемы локальных су продольным угловым движением самолета
5.1. Упрощенные математические модели продольного движения самолета
Продольное
движение с-та
может быть представлено в виде изолирован-
ных короткопериодического и
диннопериодического движения. Физически
такое разделение определяется тем, что
в процессе возмущенного движения на-
рушенные равновесия моментов, действующих
вокруг поперечной оси с-та (оси OZ), и
продольных и нормальных сил,
восстанавливаются во времени различно.
Быстрее восстанавливается равновесие
моментов, связанное в основном с
из-менениями угла атаки и угловой
скорости
![]() ,
и гораздо медленнее - равнове- сие сил,
связанное в основном с изменением
скорости полета с-та V.
,
и гораздо медленнее - равнове- сие сил,
связанное в основном с изменением
скорости полета с-та V.
Устойчивое короткопериодическое движение с-та заканчивается за время, за которое скорость полета с-та практически не изменяется. Поэтому уравнения короткопериодического движения с-та получают из системы
положив в ней V= const (т.е. V =0)
![]()
![]() (2.1)
(2.1)
![]()
1)- уравнение сил;
2)- уравнение моментов;
3)- кинематическое уравнение.
Системе уравнений (2.1) соответствуют следующие ПФ свободного с-та
![]() (2.2)
(2.2)
 (2.3)
(2.3)
где
![]()
![]()
Коэффициент
![]() является
характеристикой затухания (демпфирования),
а
является
характеристикой затухания (демпфирования),
а
![]() квадрат собственной частоты колебаний.
Если
квадрат собственной частоты колебаний.
Если
![]() >0,
то с-т будет статически устойчивым, а
при
>0,
то с-т будет статически устойчивым, а
при
![]() <0
неустойчивым, и колебательное звено
превратится в неустойчивое с одним
действительным положительным полюсом.
<0
неустойчивым, и колебательное звено
превратится в неустойчивое с одним
действительным положительным полюсом.
На
маневренных с-тах руль высоты (РВ)
(поворотный стабилизатор) создает
заметную по величине аэродинамическую
силу (подъемная сила РВ зависит от
величины
![]() ),
а следовательно, оказывает влияние на
перегрузку. . Обычно
),
а следовательно, оказывает влияние на
перегрузку. . Обычно
![]()
![]()
и,
согласно, ( 2.2 ), ( 2.3 ) подъемная
сила РВ (характеризуемая
![]() )
практически не оказывает влияние на
угловую скорость
)
практически не оказывает влияние на
угловую скорость
![]() ,
но влияет на перегрузку
,
но влияет на перегрузку
![]() .
При этом ПФ ( 2.3 ) имеет два действительных
нуля, приближенно равных
.
При этом ПФ ( 2.3 ) имеет два действительных
нуля, приближенно равных
![]()
Так
как один из нулей положителен, С-т
является неминимально-фазовым звеном.
Это означает, что перегрузка
![]() после
приложения единичного управляющего
воздействия через РВ создается в
направлении обратном направлению
приложения силы (перегрузки), созданной
управляющим воздействием (РВ). При
отклонении РВ создается сила (подъемная
сила РВ) и момент вокруг ЦМ с-та. Под
действие подъемной силы РВ перегрузка
принимает отрицательное значение,
которое постепенно по мере поворота
продольной оси X
с-та (увеличения угла атаки) за счет
действия момента
после
приложения единичного управляющего
воздействия через РВ создается в
направлении обратном направлению
приложения силы (перегрузки), созданной
управляющим воздействием (РВ). При
отклонении РВ создается сила (подъемная
сила РВ) и момент вокруг ЦМ с-та. Под
действие подъемной силы РВ перегрузка
принимает отрицательное значение,
которое постепенно по мере поворота
продольной оси X
с-та (увеличения угла атаки) за счет
действия момента
![]() меняет
знак и стремится к своему установившемся
положительному значению. Т.е. график
переходной функции по перегрузке на
отклонение РВ имеет вид
меняет
знак и стремится к своему установившемся
положительному значению. Т.е. график
переходной функции по перегрузке на
отклонение РВ имеет вид

Это
приводит к "неправильному" изменению
перегрузки
![]() ,
из-за которого возникает запаздывание
см. рис. выше. Этого недостатка лишены
С-ты аэродинамической схемы "утка"
(с передним расположением рулей).
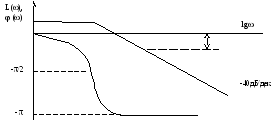
Частотные характеристики для с-та
нормальной схемы без учета (сплошные
линии) и с учетом (штриховая линия)
подъемной силы РВ показаны на рис
,
из-за которого возникает запаздывание
см. рис. выше. Этого недостатка лишены
С-ты аэродинамической схемы "утка"
(с передним расположением рулей).
Частотные характеристики для с-та
нормальной схемы без учета (сплошные
линии) и с учетом (штриховая линия)
подъемной силы РВ показаны на рис
20
lg C6/g*C9
Как видно, подъемная сила РВ не проявляет себя в области низких частот, но оказывает заметное влияние на высоких, поднимая амплитудную характеристику.
Выбор
управляемых координат С-та.
При ручном управлении летчик контролирует
реакцию с-та на отклонение рычага
управления по изменению нормальной
перегрузки
![]() или
угловой скорости тангажа
или
угловой скорости тангажа
![]() .
Выбор координаты зависит от режима
полета. Если не учитывать влияние
подъемной силы РВ
.
Выбор координаты зависит от режима
полета. Если не учитывать влияние
подъемной силы РВ
![]() =0,
то из ПФ ( 2.2 ) и ( 2.3 ) получим после окончания
переходного процесса
=0,
то из ПФ ( 2.2 ) и ( 2.3 ) получим после окончания
переходного процесса
![]() ;
; ![]()
или
![]()
Т.е.
при одной и той же установившейся угловой
скорости тангажа нормальная
перегрузка будет иметь различные
значения, пропорциональные скорости
полета V
.
Таким образом, контоль
за реакцией самолета
при малой скорости полета удобно вести
по изменению
![]() , а при больших скоростях полета – по
изменению
, а при больших скоростях полета – по
изменению
![]() .
В связи с этим выделяют режимы:
.
В связи с этим выделяют режимы:
-
тангажного управления;
-
перегрузочного управления.
В качестве управляемой координаты используется та, которая легче
контролируется летчиком. Для ЛА с преобладанием режимов тангажного управления (тяжелые и средние с-ты, большие ракеты) применяются СУ углом тангажа. Для тех же ЛА, у которых преобладают режимы перегрузочного управления (маневренные с-ты, малые ракеты), применяются СУ нормальной перегрузкой. Это не исключает возможность иметь, например, в СУ маневренного с-та режим стабилизации заданного угла тангажа.