

-
Структура бортовых систем управления полетом
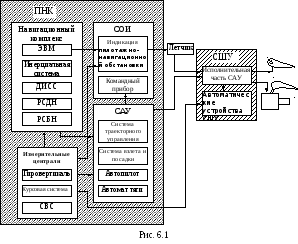
Ручное и автоматическое управление самолетом осуществляется с помощью устройств и приборов, составляющих комплекс бортового оборудования, который может быть разделен на две основные функциональные части:
-
Система штурвального управления (СШУ) – состоит из устройств перемещения органов управления и системы улучшения пилотажных характе-ристик. СШУ предназначена для обеспечения требуемых пилотажных характеристик (демпфирования, устойчивости и управляемости). Состав и структура СШУ определяются аэродинамическими и геометрическими особен- ностями конкретного самолета.
-
Пилотажно-навигационный комплекс (ПНК) – состоит из двух комплексов: навигационного и пилотажного.
ПК – комплекс оборудования, осуществляющий стабилизацию ЦМ самолета на заданной опорной траектории и управление им вокруг центра масс при автоматическом и полуавтоматическом управлении. Часто ПК называют бортовой СУ.
НК – комлекс оборудования, определяющий заданную опорную траекторию полета ЦМ самолета, выдающий информацию об отклонениях ЦМ относительно опорной траектории и информацию о текущем положении ЦМ самолета в пространстве.
РСДН – радиотехническая система дальней навигации;
ДНСС – доплеровский измеритель скорости и сноса;
РСДН – радиосредства дальней навигации;
РСБН – радиосредства ближней навигации;
Средства автоматики управления, осуществляя регулирование в контурах с обратной связью, обратывают информацию, поступающую с измерителей параметров движения самолета и формируют управляющие команды. Все измерители можно подразделить на три группы. Первую группу образуют измерительные устройства (ИУ) НК, предназначенные для вычисления фазовых координат, определяющих положение и скорость самолета относительно земли. Вторую группу – централи, выдающую информацию всем потребителям СУ. К ним относят гировертикаль (измерение углов тангажа, крена), курсовая система (измерение курса), система воздушных сигналов (СВС), измеряющая воздушную скорость, число М, вертикальную скорость, высоту полета и т.д. Третью группу образуют собственные ИУ СУ и СШУ – это датчики перегрузки, ДУС, датчики углов атаки и скольжения, а также пилотажно-навигационные приборы системы отображения информации (СОИ), объединяющие чувствительный элемент и индикатор.
Иерархическая структура системы управления (уровни управления)
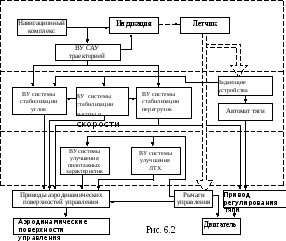
Управление траекторией полета относится к задаче высшего уровня. Это управление осуществляется путем требуемого изменения углового положения самолета или перегрузок. Поэтому в качестве параметров траекторного управления принимают заданные значения углов тангажа, крена, курса или заданных значения перегрузок. Сигналы заданного изменения этих параметров, вырабатываемые ВУ СУ траекторией, поступают в ВУ СУ углами и перегрузками, которые в иерархической структуре располагаются уровнем ниже. Эти ВУ формируют управляющие команды на перемещение органов управления, отрабатываемые приводами. На вход этих приводов поступают также сигналы из ВУ систем улучшения пилотажных и летных характеристик самолета. Это нижний исполнительный уровень иерархии. Высшим звеном иерархии является летчик. Он включает системы уровня III при автоматическом управлении полетом, вырабатывает логику включения и задает режимы стабилизации систем уровня II, осуществляет контроль, управляет самолетом по индикаторам СОИ.
Наряду с разделением по функциональным иерархическим уровням управления, существует деление и по принадлежности к тому или иному каналу управления (канал РВ, элеронов, РН, двигателя).