

§3. Матричная и векторная формы записи линейных
УРАВНЕНИЙ. ТЕОРЕМА КРОНЕКЕРА – КАПЕЛЛИ
С системой (7.1) линейных уравнений можно связать следующие матрицы:
1.Матрицу А коэффициентов аij при неизвестных x1, x2, . . . , xn системы.
Эту матрицу называют основной.
2. Если к основной матрице А присоединить столбец свободных членов в1,в2,...,вk системы, то получим так называемую расширенную матрицу А* данной системы

3. Матрицу-столбец свободных членов размер матрицы k 1.
4.
Матрицу-столбец неизвестных
 размер матрицы n1.
размер матрицы n1.
Используя определение произведения матриц, систему (7.1) можно записать в виде
АХ = В (7.4)
Эта
форма записи системы линейных уравнений
называется матричной.
Если при этом матрицу А
рассматривать как некоторое отображение
пространства Rn
в Rk,
а матрицы Х
и В
ассоциировать с вектор-столбцами
соответственно
![]() и
и
![]() Тогда решение системы (7.1) можно свести
к вопросу об установлении векторов
Тогда решение системы (7.1) можно свести
к вопросу об установлении векторов
![]() которые
являются прообразами вектора
которые
являются прообразами вектора
![]() при
отображении Rn
в Rk,
заданном матрицей А,
т.е.
при
отображении Rn
в Rk,
заданном матрицей А,
т.е.![]()
Кроме
матричной, систему линейных уравнений
можно записать и в векторной форме. Для
этого матрицу А
связывают с системой из n
вектор-столбцов
![]() в пространстве Rк.
в пространстве Rк.
Тогда
система (7.1) примет вид
![]() (7.5)
(7.5)
здесь

Исходя
из уравнения (7.5) вопрос о решении системы
(7.1) можно свести к вопросу об установлении
линейной зависимости системы векторов
![]() . Так система (7.1)
имеет решение, если вектора
. Так система (7.1)
имеет решение, если вектора
![]() линейно
зависимы. Действительно, из (7.5) следует,
что вектор
линейно
зависимы. Действительно, из (7.5) следует,
что вектор
![]() является линейной комбинацией векторов
является линейной комбинацией векторов
![]() и, следовательно, он принадлежит
подпространству, порожденному векторами
и, следовательно, он принадлежит
подпространству, порожденному векторами
![]() .
Если же вектор
.
Если же вектор
![]() не принадлежит подпространству,
порожденному векторами
не принадлежит подпространству,
порожденному векторами
![]() ,
т.е. вектора
,
т.е. вектора
![]() линейно независимы, то система (7.1)
решений не имеет. Другими словами система
(7.1) имеет решение, если ранг r*(A*)
системы векторов
линейно независимы, то система (7.1)
решений не имеет. Другими словами система
(7.1) имеет решение, если ранг r*(A*)
системы векторов
![]() не превышает ранга r(A)
системы векторов
не превышает ранга r(A)
системы векторов
![]() ,
а это означает, что они должны быть
равны. Теперь если систему векторов
,
а это означает, что они должны быть
равны. Теперь если систему векторов
![]() связать с расширенной матрицей A*,
то вышесказанное можно рассматривать
как доказательство следующей теоремы.
связать с расширенной матрицей A*,
то вышесказанное можно рассматривать
как доказательство следующей теоремы.
Теорема Кронекера – Капелли (условие совместимости системы линейных уравнений): Система линейных уравнений разрешима (совместна) тогда и только тогда, когда ранг r(A) основной матрицы А равен рангу r*(A*) расширенной матрицы A*: r(A) = r*(A*).
§4. Система крамера
Допустим,
что число уравнений в системе (7.1) равно
числу неизвестных (k
= n) и что
вектор-столбцы
![]() из Rn
линейно независимы; в этом случае (7.1)
называется системой
Крамера.
из Rn
линейно независимы; в этом случае (7.1)
называется системой
Крамера.
Поскольку
вектор-столбцы
![]() линейно независимы, то они составляют
базис пространства Rn,
следовательно, всякий вектор-столбец
линейно независимы, то они составляют
базис пространства Rn,
следовательно, всякий вектор-столбец
![]() представляется
и притом единственным способом, в форме
(7.5). Таким образом, система Крамера
всегда имеет решение, и притом единственное.
представляется
и притом единственным способом, в форме
(7.5). Таким образом, система Крамера
всегда имеет решение, и притом единственное.
Для нахождения этого решения запишем систему Крамера в матричной форме (7.4): АХ = В. Основная матрица А системы Крамера – квадратная, порядка п, и ее определитель отличен от нуля: D(A) , так как вектор-столбцы матрицы линейно независимы. Поэтому матрица А имеет обратную матрицу . Умножим обе части уравнения (7.4) на слева:
AX = B.
Поскольку A = E и EX = X, то X = B или
Перемножая на B, получаем
 .
(7.6)
.
(7.6)
Откуда
![]() ,
,
где j = 1, 2,...,n, а A1jв1 + A2jв2 +....+ Anjвn – определитель матрицы, которая получена из основной A путем замены элементов j-го столбца, т.е. коэффициентов при определяемом неизвестном xj на столбец свободных членов в1, в2,...,вn системы. Таким образом,
 .
.
Теперь вышесказанное сформулируем в виде следующего правила.
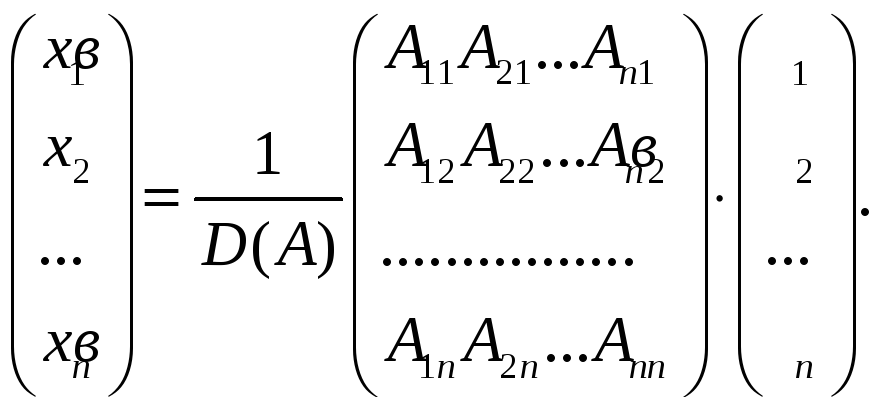
Правило Крамера. Если определитель D(A) основной матрицы А системы из n линейных уравнений с n неизвестными отличен от нуля (D(A) то система имеет единственное решение и это решение определяется по формуле:
![]() ,
j = 1,2,
...,
n,
(7.7)
,
j = 1,2,
...,
n,
(7.7)
где D(Aj) – определитель, полученный из D(A) заменой j-го столбца, столбцом свободных членов системы.
Пример. Решить систему уравнений.
 3x
– 3y
+
2z
=
2,
3x
– 3y
+
2z
=
2,
4x – 5y + 2z = 1,
5x – 6y + 4z = 3.
Вычислим определитель основной матрицы А:
 .
.
Так
как D(A)
, то это система Крамера и, следовательно,
она имеет одно решение, которое ищем по
формуле:![]()
![]()

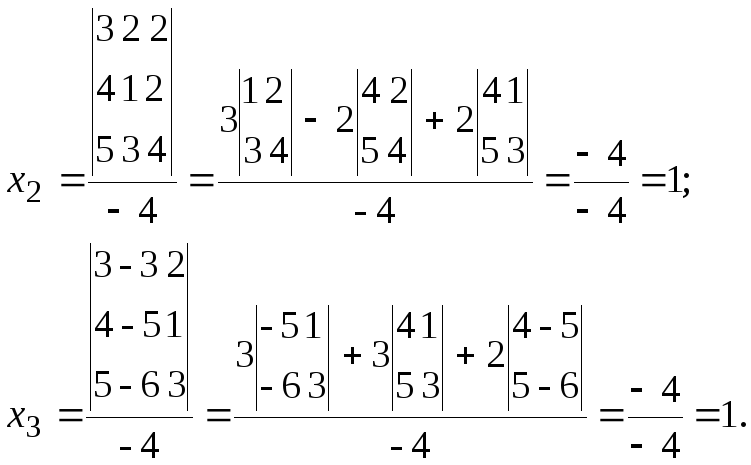
Ответ: х1 = х = 1; х2 = у = 1; х3 = z = 1.