

34. Модальне керування в цсу.
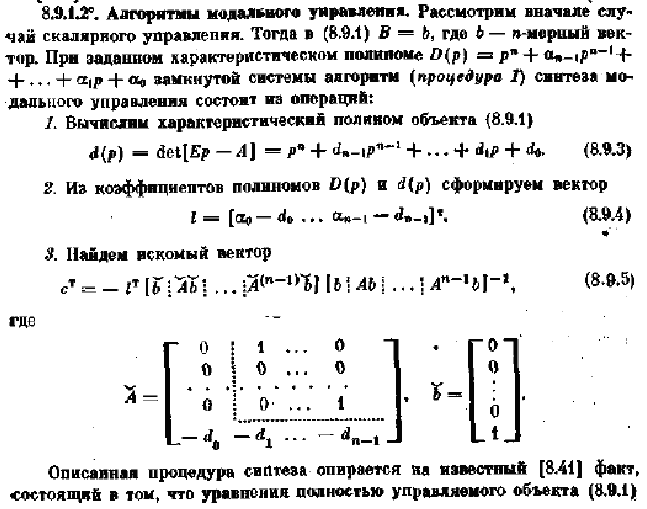
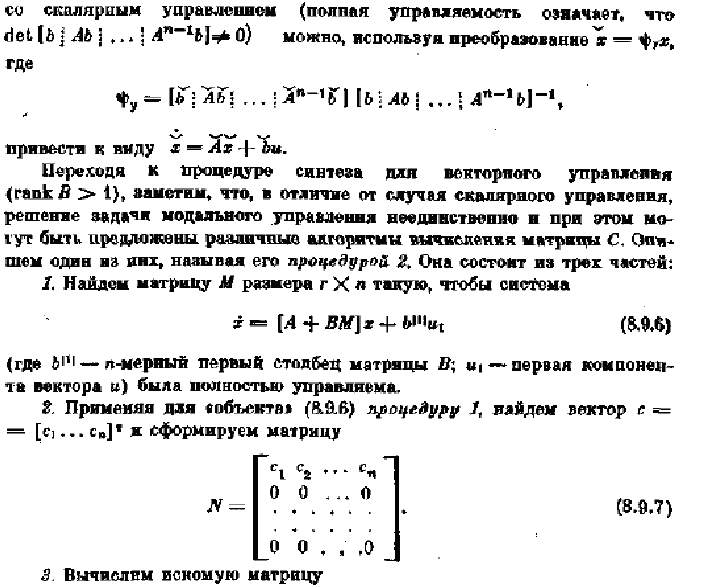
А также:
Управление отдельными корнями
Модальное управление при неполных изменениях
Модальное управление с наблюдателем пониженного порядка
Модальное управление с наблюдателем полного порядка
Модальное управление при внешних возмущениях
35. Поняття оптимальної системи автоматичного керування.
Под оптимальными системами, автоматического управления подразумевают системы, которые являются наилучшими в том или ином смысле в соответствии с оптимизируемым критерием.При оптимизации процессов управления различают следующие основные задачи. Определение оптимальной системы при произвольной структуре — наиболее общая формулировка задачи оптимизации, когда структура системы не задана, известна лишь ее принадлежность к тому или иному классу систем. При заданных статистических характеристиках внешних воздействий необходимо определить оператор систем, который обеспечивает достижение Экстремального -значения критерия оптимальности. Естественным ограничением является ..условие физической возможности системы [20). Постановка такой задачи и ее решение целесообразны с точки зрения выявления предельных возможностей системы управления из известного класса систем.Вторая ' задача — определение оптимальной системы при непроизвольной структуре управляемого объекта (неизменяемой часта системы). Требуется при заданных статистических характеристиках внешних воздействий найти оператор управляющего устройства, а значит, его структуру и параметры, при которых критерий качества системы имеет экстремальное значение. Наконец, если структура системы, и статистические свойства внешних воздействий также известны, возникает задача определения оптимальных параметров системы обеспечивающих экстремум показателя качества. Ранение первой задачи в аналитическом виде возможно получить лишь для достаточно простых вариантов. Наиболее распространенное является вторая постановка задачи оптимизации, решение которой позволяет найти структуру оптимального УУ. Синтез оптимальной системы управления при заданном критерии оптимальности в этом случае требует глубокого предварительного изучения свойств управляемого объекта и условий его функционирования.
36. Послідовність проектування оптимальної сау.
Для проектирования оптимальных САУ необходимо:
1. Определить математическую модель ОУ, т. е. оператор, устанавливающий динамическую связь между входными и выходными координатами объекта. Для этих целей используют аналитические и экспериментальные методы идентификации.
2. Проанализировать свойства внешних возмущений н их характеристик.
3. Выявить наличие и характер ограничений на управляющие воздействия и управляемые переменные.
4. Сформулировать цель управления в виде критерия оптимальности.
5. Найти оптимальные управляющие воздействия, структуру и параметры УУ.
Решение задачи оптимального управления позволяет ответить на вопрос: как необходимо управлять системой, чтобы заданный критерий качества работы этой системы достиг максимального или минимального, т.е. экстремального, значения.
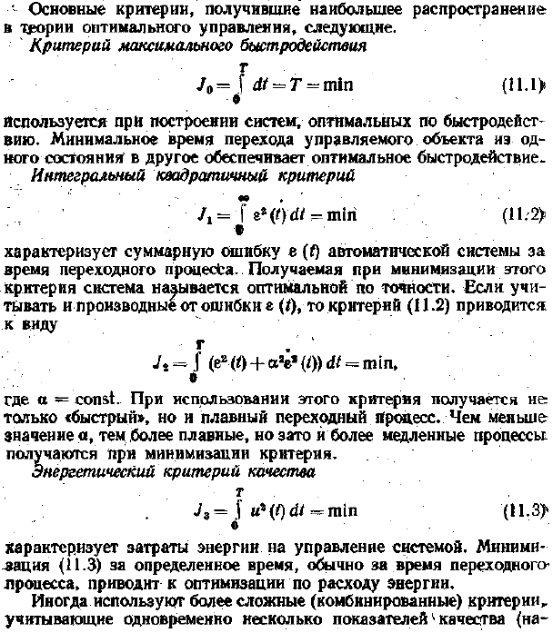
37. Основні критерії оптимальності.
Таким образом, критерий оптимальности -— это определенный технический показатель, выбор которого является инженерной задачей, иногда непростой. Трудности установления критерия оптимальности связаны с тем, что требования системе часто оказываются противоречивыми.
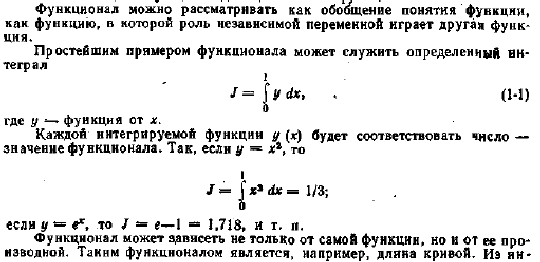
38. Поняття функціонала.

39. Теорема Ейлера.
в тетради
40. Принцип максимуму Понтрягіна.
в тетради
41. Послідовність знаходження оптимального керування на основі принципу максимуму.

42. Що покладено в основі рішення завдань методом динамічного програмування.
в тетради
43. Суть методу динамічного програмування.
в тетради
44. Поняття про адаптивні системи керування. Структурна схема адаптивної системи керування.
Общее понятие об адаптивных системах было дано во введении. Адаптивные, или приспосабливающиеся системы — это системы, 'которые автоматически приспосабливаются к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения схемы и параметров управляющего устройства. Качество управления численно определяется критерием качества J, который оценивает заранее выбранный наиболее важный показатель работы САУ. Им может быть какой-либо показатель точности работы системы или качества переходного процесса, производительность, экономичность и т. д. В общем случае критерий качества J представляет собой функционал, зависящий от выходных и входных величин системы, подобно критерию оптимальности в оптимальных САУ. В отдельных случаях / может быть просто функцией. Примером изменяющихся внешних условий, требующих применения адаптивной САУ, являются нестационарные случайные внешние воздействия на систему, характеристики которых (например, спектральная плотность) изменяются в широких пределах. В этих условиях точность работы САУ будет изменяться с изменением статистических характеристик внешних воздействий (см. третью, главу). Для повышения точности системы необходимо изменять настройку корректирующих эвенов по мере изменения характеристик внешних воздействий. Эту перенастройку иногда может выполнять человек. В адаптивных САУ она осуществляется автоматически.
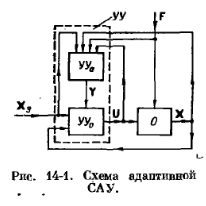
На рис. 14-1 показана в общем виде схема адаптивной САУ. Здесь О — объект управления, УУ — управляющее устройство, состоящее из двух частей: УУ0 и УУа, где УУ0 — основное управляющее устройство, а УУа — управляющее устройство адаптации. Таким образом, адаптивная САУ содержит два контура управления — основной контур и второй контур — контур адаптации, создаваемый управляющим устройством адаптации УУа. Для этого второго контура объектом управления является вен основная САУ. Контур адаптации образуют второй уровень управления, второй