

Для привлечения внимания судоводителя к тем или иным ситуациям, возникаемым при движении судов, в ECDIS могут выделяться специальные зоны. В ECDIS разных производителей эти зоны могут быть разными по форме. В режиме отображения AIS «целей» может задаваться их зона видимости и зона активации.
Для своевременного выявления «целей», представляющих опасность столкновения, устанавливаются предельные безопасные значения дистанции (LIM CPA) и времени (LIM ТCPA) кратчайшего сближения, которые являются едиными для РЛ и AIS «целей».
Пример охранной зоны
Изображение ТТ и AIS символов одной «цели» на экране ECDIS «NS4000»
21
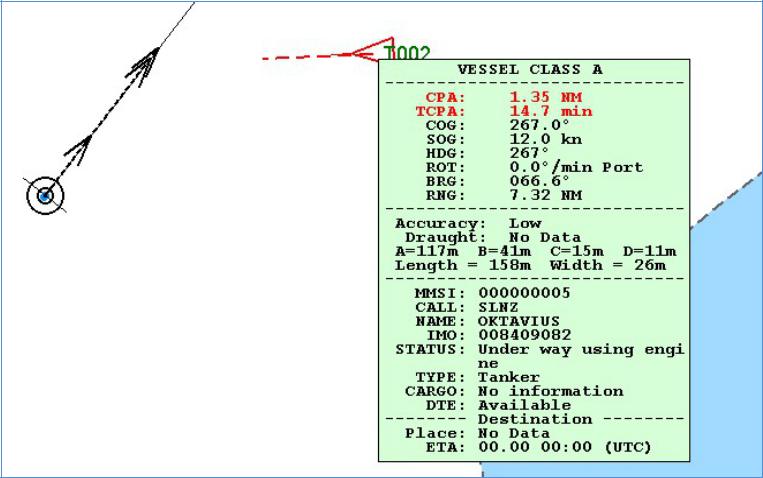
Вызов данных AIS «цели» на экран ECDIS
22

Схема отображения ситуации с помощью PAD для облегчения выбора маневра курсом
(ECDIS «VisionMaster FT» компании «Sperry Marine»)
23

Применение сектора опасных относительных курсов для выбора маневров расхождения
(ECDIS «NavCom Voyager» компании «Navmarine»)
|
KJ |
Сектор опасных относительных курсов |
DКРЗ |
|
|
K0 |
B0 |
|
J
B2
A |
|
Курс для расхождения с целью на дистанции DKPЗ с пересечением |
|
ее курса по корме |
|
|
0 |
Вектор скорости для расхождения на DKPЗ путем изменения курса и |
|
|
|
|
|
скорости |
24

Отображение с помощью СООК ситуации с пятью «целями» в ECDIS «NavCom Voyager»
25

5. Информационная поддержка при маневрировании
Получение траекторий маневра
Упрощенное представление траектории поворота
θ
B
P 










 Дуга окружности с радиусом DT/2
Дуга окружности с радиусом DT/2
|
M |
|
|
|
|
|
|
||
|
A (WOP) |
|
|
|
Один из способов представления |
Прогноз изменения |
|
||
курса в ECDIS |
|
|||
траектории поворота |
|
|||
«NS4000» |
|
|||
|
|
|
|
|
|
Для выполнения прогноза поворота необходимо задать: |
|
||
New CTW - курс судна после поворота; |
|
|
||
Radius |
- радиус поворота судна; |
|
|
|
Length |
- длину линии ожидаемого движения судна; |
|
|
|
Delay |
- расстояние от места судна до точки WOP начала выполнения маневра; |
|
||
F dist |
- дистанцию от WOP до начала движения по окружности. |
26 |
||

Прогноз траектории поворота для обеспечения точного захода в ворота порта с помощью имитационной модели движения судна
(ECDIS «dKart™ Navigator 9000»)
- исходное место |
|
судна; |
|
- точка начала перекладки руля и точка окончания |
|
прогноза; |
|
- рекомендуемая точка начала |
27 |
одерживания. |

Предиктор движения корпуса судна при проводке
а) |
|
б) |
|
|
|
а) в ECDIS «NS4000»;
б) при использовании программного продукта «Qastor» компании «Quality Positioning Services BV».
Прогнозирование выполняется по текущей информации навигационных датчиков (в некоторых ECDIS – с использованием фильтра Калмана) на
заданный период времени, обычно – до 6 мин.
28
Режим швартовки
При швартовке должно быть четкое и полное представление о ситуации, включая знание дистанции до причала носа и кормы; угла ДП судна по отношению к нему; курса, линейной и угловой скорости судна относительно грунта; а также скорости движения кормовой и носовой частей судна. Скорость судна при касании с причалом обычно не должна превышать 10 см/с, для некоторых судов опасной уже является скорость 5 см/с.
Швартовный режим («Docking Mode») ECDIS в общем случае обеспечивает возможность получения и отображения на экране следующих данных:
•мгновенных значений продольной и угловой скорости судна;
•векторов текущей скорости движения носа и кормы;
•значений поперечной компоненты скорости носа и кормы;
•угла ДП по отношению к причалу;
•минимальных расстояний от средней и концевых точек контуров носа и кормы до введенных оператором отрезков, отмечающих край причала или кромку отмели (или расстояний между заданными оператором точками на контуре судна и соответствующими им заданными точками на карте);
•заданное количество (до 10-15) прогнозируемых положений контура судна через определенный (1-30 с.) интервал времени;
•заданное количество (до 10-15) прошлых положений контура судна через определенный (1-30 с.) интервал времени.
29
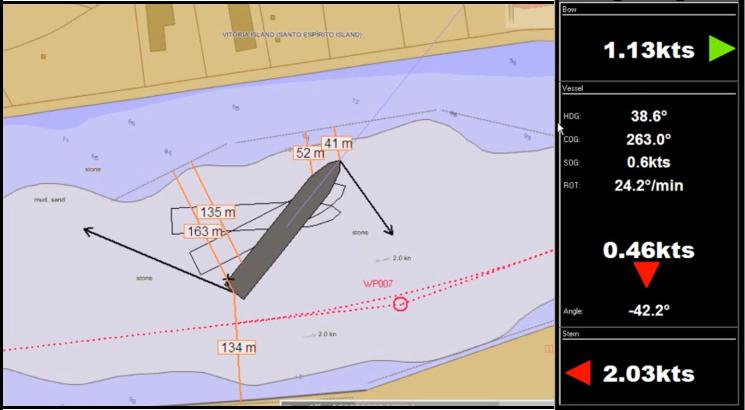
Отображение информации при развороте корпуса судна в узкости при использовании программного продукта «Qastor» компании
«Quality Positioning Services BV».
30