

Тема: ИСПОЛНИТЕЛЬНАЯ ПРОКЛАДКА В
ECDIS
1.Счисление, обсервации, прокладка пути.
2.Мониторинг прохождения маршрута.
3.Контроль навигационных опасностей.
4.Использование информации РЛС и АИС
5.Информационная поддержка при маневрировании.
6.Ведение электронного судового журнала.
ВЛЛ
1. Счисление, обсервации, прокладка пути.
Исполнительная прокладка является основным режимом работы ECDIS. Она включает решение следующих задач:
•прием и обработку данных от внешних навигационных систем;
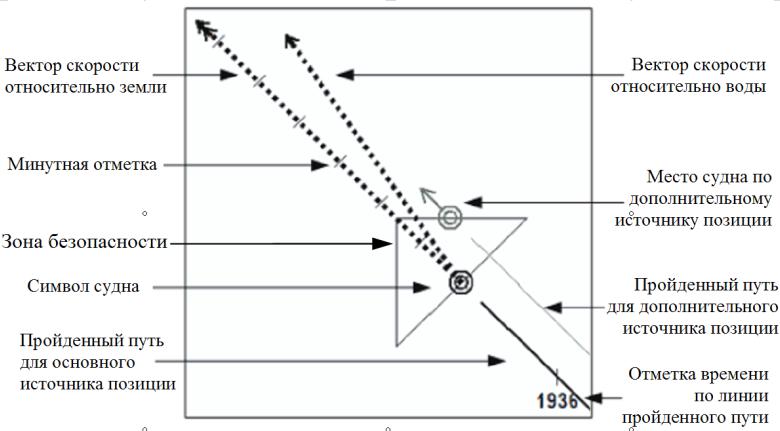
•непрерывное отображение символа судна и параметров его движения на электронной карте;
•контроль навигационной безопасности плавания;
•контроль движения судна по заданному маршруту;
•регистрацию и хранение информации о текущих навигационных параметрах и обстоятельствах плавания;
•и ряд других
2
Базовая точке отсчета координат (CCRP - Consistent Common Reference Point).
Отображаемые в ECDIS текущие координаты места судна соответствуют CCRP.
CCRP - это точка на собственном судне, к которой отнесены все измерения горизонтальных параметров, таких как дистанция до «целей», пеленг, относительные курс/скорость, дистанция и время кратчайшего сближения.
Счисление пути
ВECDIS возможны следующие варианты счисления:
•по данным компаса и лага и вводимым вручную значениям начальных координат;
•по данным компаса и вводимым вручную значениям начальных координат и путевой скорости;
•по данным лага и вводимым вручную значениям начальных координат и путевого угла;
•по всем параметрам, вводимым вручную.
3
Обсервации
Автоматические определения. В ECDIS обеспечивается выбор средств для определения места (EPFS - Electronic Position Fixing System): одной системы (GPS, DGPS, ГЛОНАСС, Loran–C) или нескольких позиционных систем одновременно. Для ведения исполнительной прокладки обычно одна из систем EPFS выбирается в качестве первичной (основной), а другая – вторичной (дополнительной). Чаще всего основной EPFS служит GPS или DGPS.
Основной и вторичной системой навигации может быть и РЛС, автоматически определяющая место судна по опорным ориентирам. Таким ориентиром может служить любая сопровождаемая стационарная «цель».
Во многих ECDIS для определений места по нескольким или всем позиционным и для счисления датчикам применяется фильтр Калмана. Он учитывает свойства погрешностей этих датчиков и позволяет получать сглаженное наилучшим образом место судна. Минимальное количество датчиков: один позиционный и ГК.
Обсервации по вводимым вручную значениям пеленгов и дистанций
навигационных ориентиров. Последовательность такого определения места судна включает:
–выделение ориентиров на карте;
–ввод результатов измерений навигационных параметров (пеленгов и дистанций) ориентиров;
–расчет обсервованного места и, по усмотрению, принятие его к счислению.
4
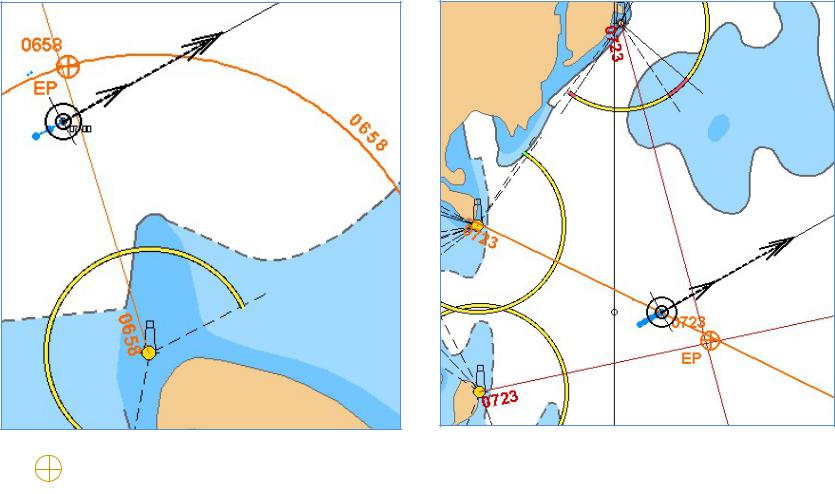
Пример обсервации по пеленгу и дистанции и по 3-м пеленгам
- Обсервованное место (EP -Estimated Position)
5
Режимы прокладки пути:
•Основной;
•Аварийный;
•Параллельный.
Режим параллельной прокладки в ECDIS «NavCom Voyager» компании «NavMarine»
6
2. Мониторинг прохождения маршрута.
Данные, характеризующие прохождение маршрута:
•название отслеживаемого маршрута (Route);
•номер и название активной путевой точки (WPT);
•направление активного отрезка отслеживаемого маршрута (CRS, CUR);
•фактическое боковое отклонение от активного отрезка маршрута (XTD);
•пеленг на активную путевую точку (BTW);
•ожидаемое UTC или судовое время прибытия в активную путевую точку с учетом оставшегося расстояния до нее и текущей скорости судна (UTC/ETA);
•расстояние до активной путевой точки (DTG);
•время хода до активной путевой точки, вычисленное по оставшемуся расстоянию до нее и фактической скорости судна (TTG);
•номер следующей путевой точки (Next WPT);
•направление следующего отрезка маршрута (Next CRS);
•радиус поворота на следующий отрезок маршрута (Radius);
•длина следующего отрезка маршрута (Distance).
7
Возможная организация тревог:
•прохождение последней путевой точки на отслеживаемом маршруте (End of route);
•отклонение судна от линии пути на величину, большую установленного значения (Out of XTL);
•отставание или опережение расписания (Out of schedule);
•подход к путевой точке за установленный период времени (WPT approach);
•расхождение текущего курса и направления отрезка маршрута на значение, большее заданного (Off leg course).
8
3. Контроль навигационных опасностей
Задачи:
•выделение на карте выбранной безопасной изобаты, отметок опасных глубин и других навигационных препятствий;
•автоматическая установка ближайшей большей изобаты в качестве безопасной, если выбранная пользователем такая изобата отсутствует на текущей карте;
•индикация автоматической смены безопасной изобаты, а также индикация невозможности выбора ее программой;
•контроль пересечения судном безопасной изобаты через заданный промежуток времени или приближения к ней на заданное расстояние;
•контроль опасностей в выделяемой специальной зоне, связанной с судном;
•контроль пересечения судном границы района, запретного для навигации, или зоны с особыми условиями плавания;
•использование «опасных» объектов карты пользователя.
9
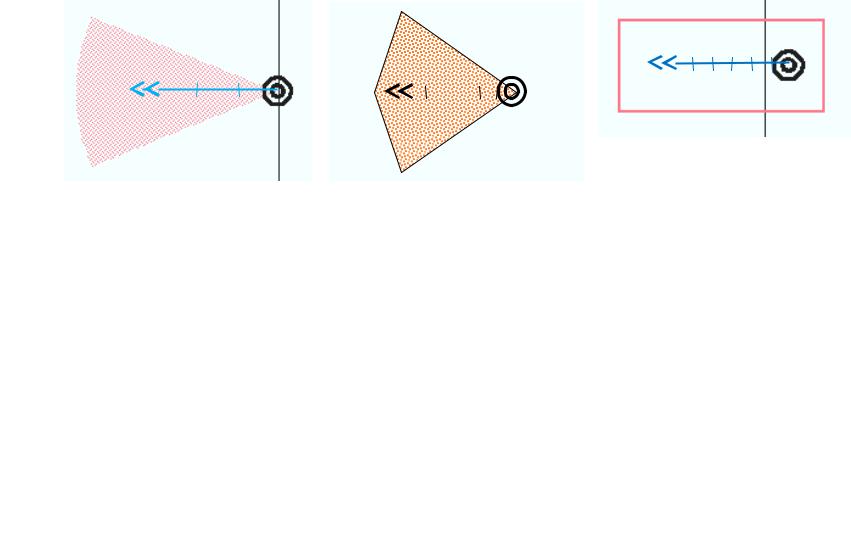
Примеры зон для контроля навигационных препятствий
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|
|
|
в) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При попадании опасного объекта в пределы зоны (независимо от того, показывается она на экране или нет) автоматически подается сигнал предупреждения. Название опасного объекта появляется на специальной панели сообщений и в ряде ECDIS дублируется голосом.
10