

Аналогия величин поступательного и вращательного движения
|
Поступательное движение |
Вращательное движение |
|
Линейное перемещение
|
Угловое перемещение
|
|
Линейная скорость
|
Угловая скорость
|
|
Линейное ускорение
|
Угловое ускорение
|
|
Масса |
Момент инерции |
|
Количество движения, импульс
|
Момент импульса
|
|
Сила
|
Момент силы
|
|
Основные уравнения динамики
|
|


МОМЕНТ КОЛИЧЕСТВА ДВИЖЕНИЯ (кинетический момент, момент импульса, орбитальный момент, угловой момент) - одна из динамич. характеристик движения материальной точки или механич. системы; играет особенно важную роль при изучении вращат. движения. Как и для момента силы, различают M. к. д. относительно центра (точки) и относительно оси.
M.
к. д. материальной
точки относительно
центра О равен
векторному произведению
радиуса-вектора r точки,
проведённого из центра О,
на её кол-во движения mv,
т. е. k0 =
[rmu]
или в др. обозначениях k0 = r ![]() mu.
M. к. д. kz материальной
точки относительно оси z, проходящей
через центр О,
равен проекции вектора k0 на
эту ось. Для вычисления M. к. д. точки
справедливы все ф-лы, приведённые для
вычисления момента
силы, если в них заменить вектор F (или
его проекции) вектором mu (или
его проекциями). Изменение M. к. д. точки
происходит под действием моментаm0(F)
приложенной силы. Характер этого
изменения определяется ур-нием dk/dt
= m0(F),
являющимся следствием осн. закона динамики.
Когда m0(F)
= 0, что, напр., имеет место для центр. сил,
M. к. д. точки относительно центра О остаётся
величиной постоянной; точка движется
при этом по плоской кривой и её
радиус-вектор в любые равные промежутки
времени описывает равные площади. Этот
результат важен для небесной механики
(см.Кеплера
законы ),а
также для теории движения космич. летат.
аппаратов, ИСЗ и др.
mu.
M. к. д. kz материальной
точки относительно оси z, проходящей
через центр О,
равен проекции вектора k0 на
эту ось. Для вычисления M. к. д. точки
справедливы все ф-лы, приведённые для
вычисления момента
силы, если в них заменить вектор F (или
его проекции) вектором mu (или
его проекциями). Изменение M. к. д. точки
происходит под действием моментаm0(F)
приложенной силы. Характер этого
изменения определяется ур-нием dk/dt
= m0(F),
являющимся следствием осн. закона динамики.
Когда m0(F)
= 0, что, напр., имеет место для центр. сил,
M. к. д. точки относительно центра О остаётся
величиной постоянной; точка движется
при этом по плоской кривой и её
радиус-вектор в любые равные промежутки
времени описывает равные площади. Этот
результат важен для небесной механики
(см.Кеплера
законы ),а
также для теории движения космич. летат.
аппаратов, ИСЗ и др.
Для
механич. системы вводится понятие о
главном M. к. д. (или кинетич. моменте)
системы относительно центра О,
равном геом. сумме M. к. д. всех точек
системы относительно того же центра:![]()
Вектор K0 может быть определён его проекциями на взаимно перпендикулярные оси Oxyz. Величины Kx, Ky, Кz, являются одновременно главным M. к. д. системы относительно соответствующих осей. Для тела, вращающегося вокруг неподвижной оси z с угл. скоростью w, эти величины равны:Kx= -Ixzw, Ку = = -Iyzw, Kz = Izw, где Iz - осевой, a Ixz и Iyz - центробежные моменты инерции. Если же тело движется около неподвижной точки О, то для него в проекциях на главные оси инерции, проведённые в точке О, будет Kx =- Ixwx, Ку = 1уwу, Kz = Izwz, где Ix, 1у, Iz - моменты инерции относительно гл. осей; wx, wy, wz - проекция мгновенной угл. скорости w на эти оси. Из ф-л видно, что направление вектора K0 совпадает с направлением w лишь тогда, когда тело вращается вокруг одной из своих гл. (для точки О)осей инерции. В этом случае K0 = Iw, где I - момент инерции тела относительно этой гл. оси.
Изменение главного M. к. д. системы происходит только в результате внеш. воздействий и зависит от гл. момента Me0 внеш. сил; эта зависимость определяется ур-нием dK0/dt = Me0 (ур-ние моментов). В отличие от случая движения одной точки, ур-ние моментов для системы не является следствием ур-ния кол-в движения, и оба эти ур-ния могут применяться для изучения движения системы одновременно. С помощью одного только ур-ния моментов движение системы (тела) может быть полностью определено лишь в случае чисто вращат. движения (вокруг неподвижной оси или точки). Если гл. момент внеш. сил относительно к--н. центра или оси равен нулю, то главный M. к. д. системы относительно этого центра или оси остаётся величиной постоянной, т. е. имеет место закон сохранения M. к. д. (см. Сохранения законы ).Понятие о главном M. к. д. широко используется в динамике твёрдого тела, особенно в теории гироскопа.
M. к. д., так же как и кол-вом движения, обладают все формы материи, в т. ч. эл--магн., гравитац. и др. поля.
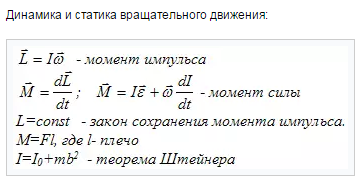
Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Ж. Фуко в его докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
При воздействии моментавнешнейсилывокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг осипрецессии, которая перпендикулярна моменту внешних сил.
Поведение гироскопа в инерциальной системе отсчёта описывается, согласно следствию второго закона Ньютона, уравнением
![]()
где векторы![]() и
и![]() являются,
соответственно,моментом
силы, действующей на гироскоп, и
егомоментом
импульса.
являются,
соответственно,моментом
силы, действующей на гироскоп, и
егомоментом
импульса.
Изменение вектора момента
импульса ![]() под
действием момента силы возможно не
только по величине, но и по направлению.
В частности,момент
силы
под
действием момента силы возможно не
только по величине, но и по направлению.
В частности,момент
силы![]() ,
приложенный перпендикулярно оси вращения
гироскопа, то есть перпендикулярный
,
приложенный перпендикулярно оси вращения
гироскопа, то есть перпендикулярный![]() ,
приводит к движению, перпендикулярному
как
,
приводит к движению, перпендикулярному
как![]() ,
так и
,
так и![]() ,
то есть к явлениюпрецессии.
Угловая скорость прецессии
,
то есть к явлениюпрецессии.
Угловая скорость прецессии![]() гироскопа
определяется его моментом импульса и
моментом приложенной силы:
гироскопа
определяется его моментом импульса и
моментом приложенной силы:
![]()
то есть ![]() обратно
пропорциональна скорости вращения
гироскопа. Одновременно с возникновением
прецессии, согласно следствиютретьего
закона Ньютона, гироскоп начнёт
действовать на окружающие его тела
моментом реакции, равным по величине и
противоположным по направлению моменту
обратно
пропорциональна скорости вращения
гироскопа. Одновременно с возникновением
прецессии, согласно следствиютретьего
закона Ньютона, гироскоп начнёт
действовать на окружающие его тела
моментом реакции, равным по величине и
противоположным по направлению моменту![]() ,
приложенному к гироскопу. Этот момент
реакции называется гироскопическим
моментом.
,
приложенному к гироскопу. Этот момент
реакции называется гироскопическим
моментом.
Гироскоп чаще всего применяется как чувствительный элемент указывающих гироскопических приборов и как датчик угла поворота или угловой скорости для устройств автоматического управления. В некоторых случаях, например в гиростабилизаторах, гироскопы используются как генераторы момента силы или энергии.
Основные области применения гироскопов – судоходство, авиация и космонавтика. Почти каждое морское судно дальнего плавания снабжено гирокомпасом для ручного или автоматического управления судном, некоторые оборудованы гиростабилизаторами. В системах управления огнем корабельной артиллерии много дополнительных гироскопов, обеспечивающих стабильную систему отсчета или измеряющих угловые скорости. Без гироскопов невозможно автоматическое управление торпедами. Самолеты и вертолеты оборудуются гироскопическими приборами, которые дают надежную информацию для систем стабилизации и навигации. К таким приборам относятся авиагоризонт, гировертикаль, гироскопический указатель крена и поворота. Гироскопы могут быть как указывающими приборами, так и датчиками автопилота. На многих самолетах предусматриваются гиростабилизированные магнитные компасы и другое оборудование – навигационные визиры, фотоаппараты с гироскопом, гиросекстанты. В военной авиации гироскопы применяются также в прицелах воздушной стрельбы и бомбометания.
Классическая механикапостулирует следующие два принципа:
время абсолютно, то есть промежутки времени между любыми двумя событиями одинаковы во всех произвольно движущихся системах отсчёта;
пространство абсолютно, то есть расстояние между двумя любыми материальными точками одинаково во всех произвольно движущихся системах отсчёта.
Эти два принципа позволяют записывать уравнение движения материальной точки относительно любой неинерциальной системы отсчёта, в которой не выполняется первый закон Ньютона.
Уравнение движения материальной точки в неинерциальной системе отсчёта может быть представлено в виде[1]:
![]() ,
,
или в развёрнутом виде:
 ,
,
где ![]() —массатела,
—массатела,![]() ,
,![]() —
ускорение и скорость тела относительно
неинерциальной системы отсчёта,
—
ускорение и скорость тела относительно
неинерциальной системы отсчёта,![]() —
сумма всех внешних сил, действующих на
тело,
—
сумма всех внешних сил, действующих на
тело,![]() —переносное
ускорениетела,
—переносное
ускорениетела,![]() —кориолисово
ускорениетела,
—кориолисово
ускорениетела,![]() —
угловая скорость вращательного движения
неинерциальной системы отсчёта вокруг
мгновенной оси, проходящей через начало
координат,
—
угловая скорость вращательного движения
неинерциальной системы отсчёта вокруг
мгновенной оси, проходящей через начало
координат,![]() —
скорость движения начала координат
неинерциальной системы отсчёта
относительно какой-либо инерциальной
системы отсчёта.
—
скорость движения начала координат
неинерциальной системы отсчёта
относительно какой-либо инерциальной
системы отсчёта.
Это уравнение может быть записано в привычной форме второго закона Ньютона, если ввестисилы инерции:
 —
переносная сила инерции
—
переносная сила инерции — сила
Кориолиса
— сила
Кориолиса
В неинерциальных системах отсчета возникают силы инерции. Появление этих сил является признаком неинерциальности системы отсчета.
Из кинематики известно, что
![]()
где ![]() —угловая
скоростьвращения неинерциальной
системы отсчёта
—угловая
скоростьвращения неинерциальной
системы отсчёта![]() ,
,![]() —
скорость движения рассматриваемой
материальной точки в этой системе
отсчёта; квадратными скобками обозначена
операциявекторного
произведения.
—
скорость движения рассматриваемой
материальной точки в этой системе
отсчёта; квадратными скобками обозначена
операциявекторного
произведения.
При́нцип относи́тельности (принцип относительности Эйнштейна) — фундаментальный физический принцип, один из принципов симметрии, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Отсюда следует, что все законы природы одинаковы во всех инерциальных системах отсчёта.
Частным случаем принципа относительности Эйнштейна является принцип относительности Галилея, который утверждает то же самое, но не для всех законов природы, а только для законов классической механики, подразумевая применимость преобразований Галилея и оставляя открытым вопрос о применимости принципа относительности к оптике и электродинамике.
В современной литературе принцип относительности в его применении к инерциальным системам отсчета (чаще всего при отсутствии гравитации или при пренебрежении ею) обычно выступает терминологически как лоренц-ковариантность (или лоренц-инвариантность).
Из
формулы для ускорений следует, что если
движущаяся система отсчета движется
относительно первой без ускорения, то
есть ![]() ,
то ускорение
,
то ускорение![]() тела
относительно обеих систем отсчета
одинаково.
тела
относительно обеих систем отсчета
одинаково.
Поскольку в Ньютоновской динамике из кинематических величин именно ускорение играет роль, то, если довольно естественно предположить, что силы зависят лишь от относительного положения и скоростей физических тел (а не их положения относительно абстрактного начала отсчета), окажется, что все уравнения механики запишутся одинаково в любой инерциальной системе отсчета — иначе говоря, законы механики не зависят от того, в какой из инерциальных систем отсчета мы их исследуем, не зависят от выбора в качестве рабочей какой-либо конкретной из инерциальных систем отсчета. Также — поэтому — не зависит от такого выбора системы отсчета наблюдаемое движение тел (учитывая, конечно, начальные скорости). Это утверждение известно как принцип относительности Галилея, в отличие от Принципа относительности Эйнштейна
В основе теории относительности лежит известный и в ньютоновской механике принцип равноправия инерциальных систем отсчета. Этот принцип был распространен на все физические явления, включая электромагнитные.
Новым в релятивистской физике стал постулат постоянства скорости света в вакууме c во всех инерциальных системах отсчета и ее независимость от скоростей источника и приемника излучения. Этот постулат противоречит классическому закону сложения скоростей. Принцип и постулат теории относительности позволили вывести законы преобразования физических величин при переходе из одной инерциальной системы отсчета в другую, отличные от классических.
Наблюдатель в одной инерциальной системе отсчета описывает событие, произошедшее в точке с координатами x, y, z в момент времени t. В другой инерциальной системе, движущейся со скоростью u вдоль оси X относительно первой, это же событие наблюдается в точке с координатами x’, y’, z’в момент времени t’. Связь этих координат и моментов времени определяется преобразованиями Лоренца:

Пусть
в системе отсчета K’ материальная точка
движется вдоль оси х’ с постоянной
скоростью ![]() Система
K’ движется относительно системы K в
том же направлении со скоростью v ,
Определим, чему равна скорость материальной
точки vo,
относительно системы K, т.е. чему равно
Система
K’ движется относительно системы K в
том же направлении со скоростью v ,
Определим, чему равна скорость материальной
точки vo,
относительно системы K, т.е. чему равно ![]() .
Пусть при
.
Пусть при ![]() м.т.
находится в начале координат, причем
м.т.
находится в начале координат, причем ![]() .
Для системы K:
.
Для системы K:
Подставляя ![]() и
t в формулу для vo
и
t в формулу для vo
Делим числитель и знаменатель на t

Это
равенство выражает собой релятивистский
закон сложения скоростей. При малых
значениях скоростей ![]() и
и ![]() имеем
имеем
![]()
т.е. релятивистский закон сложения скоростей переходит в классический
“Релятивистское” сокращение длины и замедление времени
Как известно, в СТО вывод о сокращении длины движущихся тел (расстояний между двумя точками пространства в движущейся системе координат) следует непосредственно из преобразований Лоренца-Эйнштейна, связывающих переменные x, y, z одной системы координат с переменными x’, y’, z’ другой системы координат, движущейся равномерно и прямолинейно с некоторой скоростью v вдоль оси первой системы.
Пусть некоторая система координат X’O’Y’ движется равномерно и прямолинейно со скоростью v вдоль оси OX другой системы координат XOY, как это показано на рисунке 1.
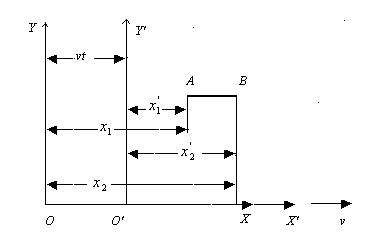
Рис.1. Стержень AB покоится в системе X’O’Y’
Тогда между переменными x’, y’, z’ и t’ одной системы координат и переменными x, y, z и t другой системы имеют место соотношения, которые и называются преобразованиями Лоренца-Эйнштейна:
x’ = (x - vt) / (1- v2 / c2)1/2 (1)
y’ = y (2)
z’ = z (3)
t’ = (t – vx /c2) / (1- v2 / c2)1/2 (4)
где x, y, z и t – параметры до преобразования;
x’, y’, z’ и t’ – параметры после преобразования.
Предположим, что в системе X’O’Y’ покоится стержень AB, расположенный параллельно оси O’X’ (рис.1). Предположим, что в системе X'O'Y' покоится стержень АВ, расположенный параллельно оси O'X', как это изображено на рис.1. Точки А и В этого стержня в системеX'O'Y' имеют координаты x’1 и x’2. Соответственно, в системе XOY эти же точки имеют координаты x1 и x2 .
Длину стержня AB можно определить как разность координат его концов, измеряемых в одной и другой системе координат. Тогда на основании (1) можно записать:
x’1 = (x1 – vt) / (1- v2 / c2)1/2
x’2 = (x2 – vt) / (1- v2 / c2)1/2
Откуда следует:
x’2 - x’1 = (x2 – x1) / (1- v2 / c2)1/2
Величина x’2 - x’1 = l’ есть длина стержня АВ, измеряемая в системе X'O'Y'. Соответственно, величина x2 – x1 = l есть длина того же стержня, измеряемая в системе XOY. Следовательно,
l’ = l / (1- v2 / c2)1/2 или l = l’ (1- v2 / c2)1/2 (5)
Таким образом, непосредственно из преобразований Лоренца-Эйнштейна следует, что длина стержня АВ, или расстояние между одновременным положением его концов, оказывается величиной относительной – различной в различных системах координат.
|
Релятивистская динамика. Динамика, основанная на принципах СТО, инвариантная относительно преобразований Лоренца, называется релятивистской динамикой. Основной
закон динамики (второй
закон Ньютона)
для материальной точки имеет вид: |
|
|
Релятивистский импульс В теории относительности импульс определяется по формуле
Следовательно, При υ=c получим, что со скоростью, равной скорости света может двигаться только тело, имеющее массу, равную нулю. Это говорит о предельном характере скорости света для материальных тел. |
|
|
Закон взаимосвязи массы и энергии Полную энергию свободного тела можно определить как произведение его релятивистской массы на квадрат скорости света в вакууме: E=mc2 |
E=mc2 |
|
Если
изменяется энергия системы, то
изменяется и ее масса: Нельзя говорить, что при этом масса переходит в энергию. В действительностиэнергия переходит из одной формы (механической) в другие (электромагнитную и ядерную), но любое превращение энергии сопровождается превращением массы. |
|
 .
.




Законы сохранения
Систему материальных точек или тел, движение (или равновесие) которой рассматривается, будем называть механической системой. Если между точками (телами) механической системы действуют силы взаимодействия, то она обладает тем свойством, что в ней положение или движение каждой точки (тела) зависит от положения и движения всех остальных. Классическим примером такой системы является солнечная система, в которой все тела связаны силами взаимного притяжения.
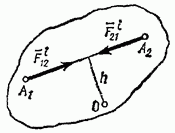
Рис. 274
Действующие
на механическую систему активные
силы ![]() и
реакции связей
и
реакции связей ![]() разделяют
на внешние
разделяют
на внешние ![]() и
внутренние
и
внутренние ![]() (индексы e и
i от латинских exterior — внешний и interior —
внутренний). Внешними называют силы,
действующие на точки системы со стороны
точек или тел, не входящих в состав
данной системы. Внутренними называют
силы, с которыми точки или тела данной
системы действуют друг на друга. Это
разделение является условным и зависит
от того, какая механическая система рассматривается.
Например, если рассматривается движение
всей Солнечной системы, то сила притяжения
Земли к Солнцу будет внутренней; если
же рассматривается движение системы
Земля — Луна, то для этой системы та же
сила будет внешней.
(индексы e и
i от латинских exterior — внешний и interior —
внутренний). Внешними называют силы,
действующие на точки системы со стороны
точек или тел, не входящих в состав
данной системы. Внутренними называют
силы, с которыми точки или тела данной
системы действуют друг на друга. Это
разделение является условным и зависит
от того, какая механическая система рассматривается.
Например, если рассматривается движение
всей Солнечной системы, то сила притяжения
Земли к Солнцу будет внутренней; если
же рассматривается движение системы
Земля — Луна, то для этой системы та же
сила будет внешней.
Внутренние силы обладают следующими свойствами:
1.
Геометрическая сумма (главный вектор)
всех внутренних сил системы равняется
нулю. В самом деле, по третьему закону
динамики любые две точки системы (рис.
274) действуют друг на друга с равными по
модулю и противоположно направленными
силами ![]() сумма
которых равна нулю.
сумма
которых равна нулю.
Так как аналогичный результат имеет место для любой пары точек системы, то
![]()
2.
Сумма моментов (главный момент) всех
внутренних сил системы относительно
любого центра или оси равняется нулю.
Действительно, если взять произвольный
центр О, то из рис. 274 видно, что ![]() .
Аналогичный результат получится при
вычислении моментов относительно оси.
Следовательно, и для всей системы будет:
.
Аналогичный результат получится при
вычислении моментов относительно оси.
Следовательно, и для всей системы будет:
![]()
Из доказанных свойств не следует, однако, что внутренние силы взаимно уравновешиваются и не влияют на движение системы, так как эти силы приложены к разным материальным точкам или телам и могут вызвать взаимные перемещения этих точек или тел. Уравновешенной вся совокупность внутренних сил будет у системы, представляющей собой абсолютно твердое тело.
Зако́н сохране́ния и́мпульса утверждает, что векторная сумма импульсов всех тел системы есть величина постоянная, если векторная сумма внешних сил, действующих на систему тел, равна нулю.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении системы в пустом пространстве импульс сохраняется во времени, а при наличии внешнего воздействия скорость изменения импульса определяется суммой приложенных сил.
Согласно второму закону Ньютонадля системы изN частиц:
![]()
где ![]() импульс
системы
импульс
системы

Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек), тела или системы
![]()