

telnov-mechanika-and-TO
.pdfЗдесь Vr′ – это скалярное произведение.
Пример. Пусть два события произошли одновременно в системе S ′ в различных точках x1′ и x2′. Из формул обратного преобразования
Лоренца получаем временной интервал между этими событиями в системе S
t |
−t |
= γ |
V |
(x′ |
−x′) ≠ 0 . |
(18.9) |
|
||||||
2 |
1 |
|
c |
2 |
1 |
|
|
|
|
|
|
|
Именно поэтому при измерении длины линейки, лежащей вдоль движения в системе S ′ , экспериментаторы из систем S и S ′ получают разные результаты.
Наконец, рассмотрим пример, позволяющий до конца понять, почему в приведенном в предыдущем разделе примере при одновременном ускорении в лабораторной системе двух зарядов расстояние в сопутствующей системе возрастает. Пусть эти два заряда, расположен-
ные на расстоянии l0 , одновременно (в лаб. системе S ) в результате
удара получают скорость V . В сопутствующей системе расстояние между ними будет в γ раз больше. Как это могло произойти?!
Очень «просто». Рассмотрим, как произошли эти удары в системе отсчета S ′ , движущейся со скоростью V , в которой эти заряды после ударов будут покоиться. Во-первых, в этой системе удары произошли не одновременно. Действительно, в лабораторной системе
x1 = 0, x2 = l0, t1 = t2 = 0 , тогда из преобразований Лоренца для вре-
мени (18.5), t′ = γ(t −Vx c2 ), находим, что в движущейся системе эти
c2 ), находим, что в движущейся системе эти
удары произошли не одновременно: |
первый заряд |
с координатой |
x2 = l0 начал движение раньше на |
t′ = γVl0 / c2 . |
В течение этого |
времени второй заряд еще покоился в лаб. системе, т.е. двигался назад
в движущейся |
системе, |
и |
дополнительно |
отстал |
|
на расстояние |
|||||||||||||
l =V t′ = γV 2l |
0 |
/ c2 . Исходное расстояние в системе S ′ между за- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рядами до ударов было l |
= l0 / γ , |
с учетом задержки между ударами |
|||||||||||||||||
оно стало |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
V |
2 |
|
V |
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
l′ = l + |
l = l /γ + |
γV l |
|
/ c |
|
= γl 1 |
− |
|
|
|
+ |
|
|
|
|
= γl , (18.10) |
|||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
0 |
|
0 |
|
|
0 |
|
|
|
|
2 |
|
|
|
2 |
|
0 |
|
|
|
|
|
|
|
|
|
c |
|
|
c |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
41
это как раз то, что мы и хотели объяснить! Увеличение расстояния происходит из-за того, что системе S ′ имеется задержка между ударами.
Формулы (18.6) получены в 1904 году Х. Лоренцем как преобразования, при которых уравнения электродинамики сохраняют свой вид при переходе от одной инерциальной системы к другой. В 1905 году А.Эйнштейн вывел их из постулатов о равноправии всех инерциальных систем и существовании максимальной скорости передачи сигналов. Хотя получились те же самые преобразования, но физическое содержание в них было совершено новым.
Интересно, что Эйнштейн неоднократно выдвигали на Нобелевскую премию за разработку специальной теории относительности, но ее не давали (дали позже за объяснение фотоэффекта, гипотезу о фотонах). Причина состояла в том, что Лоренц был против, т.к. он раньше нашел закон преобразования. Сам же Х. Лоренц получил Нобелевскую премию в 1902 г за другие работы.
§ 19. Четырехмерный вектор события.
Упорядоченную четвёрку чисел R = (ct,x,y,z) ≡ R(ct, r) называют
4-вектором события. В отличие от обычного вектора, обозначаемого стрелкой или жирной буквой, 4-вектор пишут обычным шрифтом.
Переход от R(ct, r) |
к |
R′(ct′,r′) |
можно |
записать в |
матричной |
||||||
форме |
|
|
|
|
|
|
|
|
|
|
|
ct′ |
|
|
γ |
−βγ 0 0 |
ct |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
x′ |
|
−γβ γ |
0 0 |
x |
|
|
|
||||
|
|
= |
|
|
|
|
|
|
или |
R′ = LR , |
(19.1) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
y′ |
|
0 0 1 0 |
y |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z′ |
|
|
0 |
0 |
0 1 |
|
z |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
где γ = 1 1 −V 2 |
c2 , β =V c . Такая форма записи означает, что |
||||||||||
|
|
Ri′ = ∑LikRk |
|
Ri′ = ∑LikRk |
(19.2) |
||||||
|
|
|
|
|
k |
|
|
|
k |
|
|
Обычно знак суммирования опускают, подразумевая, что происходит суммирование по повторяющемуся индексу. Аналогично можно
записать R = L−1R′, где L−1 - матрица обратного преобразования, отличающаяся от L заменой β на −β. Запись в матричной форме здесь
приведена чисто для красоты (матрицы широко используются в теоре-
42

тической и практической физике), далее в нашем курсе она использоваться не будет.
Принято называть ct нулевой, x – первой, y – второй, z – третьей компонентой 4-вектора события. Любая четвёрка чисел
A = {a0,a1,a2,a3 }, компоненты которой преобразуются как компонен-
ты 4-вектора события, т.е. |
|
|
|
|
|
|
|
|
|
|
|||
a |
0 |
= γ(a′ |
+ βa′), |
a |
= γ(a′ + βa′), |
a |
2 |
= a′, |
a |
3 |
= a′ |
, (19.3) |
|
|
0 |
1 |
1 |
1 |
0 |
|
2 |
|
3 |
|
|||
называется 4-вектором. Зачем они нужны? Дело в том что, если физический закон записан через 4-х вектора, значит, мы знаем его во всех инерциальных системах отсчета, т.к. известен закон преобразования входящих в него величин. О других свойствах 4-векторов будет сказано дальше.
§20. Интервал
Внерелятивистской механике при переходе из одной системы отсчета сохраняющейся величиной является расстояние между двумя
точками l12 =| r2 - r1 | (§9). В релятивистском случае это не верно, т.к. длины масштабов меняются. Оказывается, однако, что существует комбинация (t2 −t1) и l12 , которая остается неизменной. Она называ-
ется интервал.
Любое событие определяется тремя пространственными координатами и временем. Для наглядности удобно вообразить четырехмерное пространство x,y,z,t , в котором точка совершает движение по некото-
рой траектории, мировой линии. Пусть произошло два события в точке x1,y1,z1,t1 и точке x2,y2,z2,t2 . Если в первой точке произошла вспышка света и достигла второй точки, то очевидно, что
c2(t |
−t )2 |
−(x |
2 |
−x |
)2 −(y |
2 |
−y |
)2 −(z |
2 |
−z |
)2 |
= 0 . (20.1) |
2 |
1 |
|
1 |
|
1 |
|
1 |
|
|
Для тех же двух событий в системе S ′
c2(t′ −t′)2 |
−(x′ |
−x′)2 |
−(y′ |
−y′)2 |
−(z′ |
−z′)2 |
= 0 |
(20.2) |
|
2 |
1 |
2 |
1 |
2 |
1 |
2 |
1 |
|
|
Назовем для любых двух событий интервалом величину
s = c2(t |
2 |
−t )2 |
−(x |
2 |
−x |
)2 −(y |
2 |
−y )2 |
−(z |
2 |
−z |
)2 |
. (20.3) |
|
1 |
|
1 |
|
1 |
|
1 |
|
|
С формальной точки зрения интервал можно рассматривать как расстояние между двумя точками в четырехмерном пространстве с осями X,Y,Z,cT . Имеется, однако, различие с обычной геометрией,
член, содержащий время, суммируется с другим знаком. Такую гео43
метрию, в отличие от евклидовой, называют псевдоевклидовой. Она была введена в теорию относительности Г. Минковским, и данное пространство называют пространством Минковского
Выше мы видим, что если интервал равен нулю в одной системе отсчета, то он равен нулю и в любой другой системе отсчета. А как связаны между собой интервалы s и s′ в общем случае? Оказывается, они всегда равны! В этом легко убедиться, выразив в (20.3) x,y, z,t че-
рез x′,y′, z′,t′, используя преобразования Лоренца. Действительно, поскольку поперечные координаты сохраняются, y = y′ и z = z′, то ос-
тается доказать, что |
|
|
|
|
|
c2( |
t)2 −( |
x)2 = c2( |
t′)2 −( |
x ′)2 . |
(20.4) |
Из преобразований Лоренца (18.6) имеем |
|
|
|||
t′ = γ( |
t −V |
x), |
x′ = γ( |
x −V t) . |
(20.5) |
|
c2 |
|
|
|
|
Подставляя (20.5) в правую часть (20.4), после небольших преобразований находим, что правая часть тождественно равна левой. Таким образом, мы убедились, что
s2 = s′2 . |
(20.6) |
Это замечательный результат! В классической механике, где верны преобразования Галилея, инвариантом преобразования является длина отрезка
(x2 −x1)2 +(y2 −y1)2 +(z2 −z1)2 = inv |
|
|
(20.7) |
|||||||||
Для произвольных скоростей инвариантом является интервал |
|
|||||||||||
s2 =c2(t |
−t )2 −(x |
2 |
−x |
)2 −(y |
2 |
−y |
)2 −(z |
2 |
−z |
)2 |
= inv |
(20.8) |
2 |
1 |
1 |
|
1 |
|
1 |
|
|
|
|||
Инвариантность интервала при релятивистских скоростях можно доказать формально, не прибегая к преобразованиям Лоренца. Рассмотрим два близких события, имеющие интервал
ds2 = c2dt2 − dx2 − dy2 − dz2 .
Выше было показано, что, если ds = 0 , то и ds′ = 0 . В общем случае для ds ≠ 0 следует ожидать
ds12 = a(V )ds122 ,
где коэффициент a может зависеть только от абсолютной величины относительной скорости. Он не может зависеть от координат и времени, так как тогда различные точки пространства и моменты времени
44
были бы неравноценны, что противоречит однородности пространства и времени. Он не может зависеть также и от направления относительной скорости, так как это противоречило бы изотропии пространства. Рассмотрим три системы отсчета S, S1, S2 и пусть V1 и V2 — скорости
движения систем S1 и S2 относительно S . Тогда имеем:
ds2 = a(V )ds2 |
ds2 = a(V )ds2 . |
||
1 |
1 |
2 |
2 |
С тем же основанием можно написать ds12 = a(V12 )ds22
где V12 — абсолютная величина скорости движения S1 относительно S2 . Сравнивая друг с другом эти соотношения, найдем, что должно быть
a(V ) =
a(V2) a(V12 )
1
Но V12 зависит не только от абсолютных величин векторов V1 и V2 ,
но и от угла между ними. Между тем угол вообще не входит в левую часть соотношения. Ясно поэтому, что это соотношение может быть справедливым лишь, если функция a(V) сводится к постоянной величине, равной, как это следует из того же соотношения, единице. Таким образом,
ds12 = ds22 .
Из равенства бесконечно малых следует, что и s1 = s2 .
§ 21. Преобразований Лоренца как вращение в четырехмерном пространстве
Ранее мы вывели преобразования Лоренца, пользуясь очень наглядной и физической картиной, основанной на постоянстве скорости света во всех инерциальных системах отсчета. Теперь рассмотрим другой, менее прозрачный, но более короткий вывод преобразования Лоренца. Преобразование координат и времени при переходе в другую систему отсчета должно быть таким, чтобы сохранялась неизменной величина интервала в четырехмерном пространстве. Такими переходами из одной инерциальной системы в другую являются параллельные переносы и вращения системы координат. Однако переносы системы координат не представляют интереса, т.к. сводятся к переносу начала
45
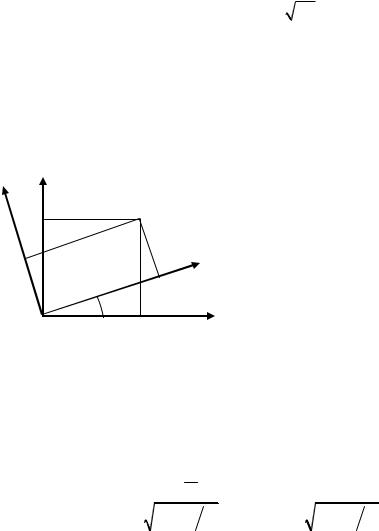
отсчета координат и времени. Таким образом, искомое преобразование должно быть связано с поворотом осей координат.
Введем обозначение T = ict , где i = −1 - мнимая единица. Тогда все 4 координаты становятся равноценными и можно пользоваться евклидовой геометрией. Рассмотрим поворот осей в плоскости T, x, y и z при этом не изменяются. Из геометрических соображений нетрудно получить, что при повороте осей на угол ϕ координаты точки преоб-
разуются следующим образом
|
|
T =T ′cosϕ −x′sin ϕ |
|
(21.1) |
||||||
|
|
x = x ′cosϕ +T ′sin ϕ |
|
|||||||
|
|
|
|
|
||||||
X ′ X |
|
|
|
Остаётся |
определить |
угол |
ϕ, |
|||
|
|
|
который |
зависит от скорости V |
||||||
x |
|
|
|
|||||||
|
|
|
системы S ′ относительно S . Для |
|||||||
|
|
|
|
|||||||
|
|
|
|
этого |
рассмотрим |
движение |
||||
x′ |
|
T ′ |
|
начала отсчёта системы |
S ′ . |
При |
||||
|
|
|
x ′ = 0 |
формулы |
(21.1) |
|||||
|
|
T ′ |
|
|||||||
|
ϕ |
|
принимают вид |
|
|
|
||||
|
T |
|
x |
= ict′sin ϕ, |
, |
(21.2) |
||||
|
|
|
||||||||
|
|
T |
|
|
t = t′cosϕ |
|||||
|
|
|
|
|
|
|
||||
|
Рис. 21 |
|
|
|
|
|
|
|||
|
|
|
откуда находим |
|
|
|
||||
|
|
tgϕ = |
x |
= −i |
V |
. |
|
|
(21.3) |
|
|
|
ict |
|
|
|
|||||
|
|
|
|
c |
|
|
|
|
||
При получении последнего равенства мы учли, что x/t |
– это скорость |
|||||
V системы S ′ . Используя обычную тригонометрии, находим |
|
|||||
|
−iV |
|
1 |
|
|
|
sin ϕ = |
c |
cosϕ = |
. |
(21.4) |
||
|
||||||
1 −V 2 c2 |
1 −V 2 c2 |
|||||
|
|
|
|
|||
Пусть вас не удивляет, что tgϕ – мнимое число, это ведь отношение
двух "катетов", один из которых мнимый. Подставляя (21.4) в (21.1) получаем снова преобразования Лоренца
|
|
|
V |
|
|
|
x = γ(x ′ +Vt′) y = y′ |
z = z′ |
|
|
. (21.5) |
||
t = γ t′ + |
|
|
x′ |
|||
|
|
|
c |
2 |
|
|
|
|
|
|
|
|
|
46
§ 22. Преобразование скоростей
Пусть некоторое тело движется относительно системы отсчёта S ′ со скоростью v′ . В свою очередь S ′ движется относительно S со скоростьюV вдоль оси OX . В кинематике Галилея скорость тела относительно S есть просто векторная сумма переносной скорости V и от-
носительной v′ , т.е. |
|
v = v′ + V . |
(22.1) |
В релятивистской кинематике это правило сложения скоростей неверно. Для получения правильных формул продифференцируем преобразования Лоренца
dx = γ(dx |
′ |
|
|
|
|
|
|
′ |
|
|
|
|
|
|
′ |
|
dz = dz |
′ |
|
|
|
|
= γ(dt |
′ |
|
V |
|
′ |
|
|||||||||||||
|
+Vdt ), |
|
dy = dy , |
|
, |
|
|
dt |
|
+ c2 dx |
). (22.2) |
|||||||||||||||||||||||||||||||
Разделив dx,dy,dz на |
dt , получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
= dx |
|
|
|
v′ |
+V |
|
|
|
|
= dy |
|
|
v′ |
γ |
|
|
|
|
|
|
= dz = |
v′ |
γ |
|
|
|
||||||||||||||
v |
|
= |
|
x |
|
|
|
|
|
; |
v |
|
= |
|
y |
|
|
|
; |
|
v |
|
z |
|
|
|
(22.3) |
|||||||||||||||
x |
|
|
|
|
|
′ |
y |
|
|
′ |
|
|
z |
|
|
′ |
|
|
||||||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
1 + |
vxV |
|
|
|
|
|
|
|
1 + vxV |
|
|
|
|
|
|
|
|
1 + vxV |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
||||||
|
|
Заменяя знак у V , получаем формулы преобразования скоростей из |
||||||||||||||||||||||||||||||||||||||||
S в S ′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
v |
′ = |
dx |
′ |
= |
|
v |
x |
−V |
|
; |
|
v′ = |
dy′ |
= |
|
vy γ |
|
|
; |
|
v′ |
= |
dz′ |
= |
|
vz |
γ |
(22.4) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
x |
|
dt |
′ 1 − |
vxV |
|
|
|
|
y |
|
dt′ 1 |
− vxV |
|
|
|
z |
|
dt′ 1 |
− vxV |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
|
|
|
|
|
|
c2 |
|
|||||
Легко убедиться, что при малых скоростях эти формулы переходят в правило Галилея для преобразования скоростей.
Пример. Если ракета летит со скоростью V ≈ c и выпускают вперед снаряд со скоростью vx′ = c , то скорость снаряда относительно неподвижного наблюдателя будет равна
v = (c +c) (1 +c2 c2 ) = c |
(22.5) |
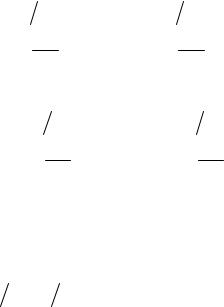
§ 23. Аберрация
Пусть в системе S ′ движется тело со скоростью v′ под углом θ к оси OX ′. Найдем, под каким углом к оси X это тело движется в системе S, рис. 22.
47
|
|
|
S |
S′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
V |
|
|
|
|
|
v′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ′ |
|
|
|
|
|
|
|
|
|
|
|
|
O |
O′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 22 |
|
|
|
|
|
|
|
|
|||
Поскольку |
|
v′ |
= v′cos θ′ |
и |
v′ = v′sin θ′ , то, |
применяя формулы |
|||||||||||||||
|
|
x |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
преобразования скоростей (22.3), находим |
|
|
|
|
|
|
|||||||||||||||
v |
|
= |
V +v′cos θ′ |
|
v |
|
= |
|
v′sin θ′ |
|
(23.1) |
||||||||||
x |
|
Vv |
′ |
|
|
|
|
|
y |
|
|
Vv′ |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
1 + |
|
cos |
θ′ |
|
|
|
|
|
+ |
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
γ 1 |
|
2 |
cos θ′ |
|
|||||||
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg θ = |
vy |
|
= |
|
|
sin θ′ |
|
|
. |
|
|
(23.2) |
||||||
|
|
|
vx |
|
γ(cos θ′ +V v′) |
|
|
||||||||||||||
В случае если тело движется с предельной скоростью v′ = c , например свет, можно легко получить выражения для sin θ и cosθ , заме-
тив, что и в системе S скорость света также равна c. Тогда
|
v |
y |
|
|
sin θ′ |
|
|
|
vx |
|
cos θ′ |
+V c |
||||||
sin θ = |
|
= |
|
|
; |
cos θ = |
= |
|
|
|
|
. (23.3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
c |
|
V |
|
|
|
c |
|
|
V |
|
|
||||||
|
|
|
|
|
|
|
|
|
cos θ′ |
|||||||||
|
|
|
|
γ 1 |
+ |
|
|
cos θ′ |
|
|
|
|
1 |
+ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Этот случай называется световой аберрацией. Обратный переход
получается заменой θ → θ′, |
θ′ |
→ θ иV → −V |
|
|
|
|
|
|
||||||||||
sin θ′ = |
vy′ |
= |
|
sin θ |
|
; |
cos θ′ = |
vx′ |
= |
cos θ −V c |
. (23.4) |
|||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
c |
|
V |
|
|
|
c |
|
|
|
V |
|
|
|||||
|
|
|
|
|
|
|
|
|
− |
cos θ′ |
||||||||
|
|
|
γ 1 |
− |
|
|
cos θ |
|
|
|
|
1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Пример. Пусть в космическом корабле произошла вспышка света. Нетрудно получить направления лучей в лабораторной системе:
48
θ′ = 0 |
|
θ = 0 |
|
θ′ = π 2 |
sin θ = 1 −V 2 c2 = 1 γ . |
(23.5) |
|
θ′ = π |
|
θ = π |
|
Видим, что свет, испущенный в системе корабля в переднюю полусферу, соберётся в конус sin θ = 1 γ вокруг направления движения
корабля. Это явление называют «эффектом фары».
Явление аберрации искажает картину звёздного неба. Рассмотрим, что увидят наблюдатели в космическом корабле. Воспользуемся формулами (23.4) и учтем, что свет от звёзд падает на корабль, т.е. нужно заменить c на −c . Пусть в лабораторной системе луч света падает на корабль по углом θ к направлению движения. Тогда в системе корабля
sin θ′ = |
|
sin |
θ |
|
. |
(23.6) |
|||
|
|
V |
|
|
|||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
γ 1 |
+ |
|
|
|
cos θ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Передняя полусфера неба соберется в системе отсчёта корабля в угол
sin θ′ = 1 −V 2 c2 = 1 γ . |
(23.7) |
Явление звёздной аберрации впервые наблюдал Брэдли в 1725 году. В результате орбитального движения Земли относительно Солнца, угол, под которым видны звёзды, меняется в течение года на величину
V/c ≈ 10−4 . Пример нерелятивистской аберрации – изменение направления падения капель дождя при движении наблюдателя.
§24. Эффект Доплера
При наблюдении звёздного неба из кабины движущегося космического корабля меняется не только распределение звёзд на небе, но и изменяется их цвет и яркость. Как известно, свет характеризуется частотой, длиной волны и скоростью распространения. Пусть волна возбуждается электронами, движущимися в плоскости XY (т.е. z = 0 ). Волна будет распространяться в направлении Z . Рассмотрим только электрическую компоненту поля. Пусть вблизи поверхности z = 0
E = E0(t) . Тогда поле в точке с координатой z
E(t,z) = E0(t −z c), |
(24.1) |
49
т.е. равно полю у источника с задержкой z c . Пусть E0 = Acos ωt , тогда
c . Пусть E0 = Acos ωt , тогда
E(t,z) = Acos(ωt −kz) , |
(24.2) |
где k = ω c . В заданной точке пространства поле меняется с периодом (фаза, ωt −kz , меняется на 2π)
c . В заданной точке пространства поле меняется с периодом (фаза, ωt −kz , меняется на 2π)
T = 2π / ω. |
|
(24.3) |
|
При фиксированном t поле |
имеет |
"гребни" |
и "впадины" с |
пространственным периодом (k |
z = 2π) |
|
|
λ = 2π |
k = |
2π . |
(24.4) |
k |
|
λ |
|
Сдругой стороны, k = ω c , откуда следуют тривиальные
c , откуда следуют тривиальные
соотношения |
|
(24.5) |
λ = cT, |
ωλ = 2πc |
|
Пусть поле наблюдается в |
точке с радиус-вектором |
r , тогда |
z = r cos θ и можно записать |
|
|
E(t, r) = Acos(ωt − kr). |
(24.6) |
|
Здесь k – волновой вектор, направленный в сторону распространения волны, его модуль определен (24.4).
Переходим, наконец, к нашей задаче – преобразованию частоты и волнового вектора волны при переходе из одной инерциальной системы отсчёта в другую. Здесь может возникнуть вопрос, зачем нам нужно знать преобразование вектора k ? Во-первых, оказывается, между ω и k имеется глубокая связь – они образуют 4-вектор; во-вторых, для квантов электромагнитного поля, фотонов, энергия и импульс равны E = ω , p = k (это будет обсуждаться подробно в разделе релятиви-
стская динамика).
Итак, представим себе, что источник в системе S ′ создаёт систему плоских волн, распространяющихся из начала координат O′ под углом θ′ и характеризующуюся длиной волны λ′ = λ0 и периодом T ′ =T0
(для простоты считаем, что происходят короткие вспышки через вре-
мя T0 ), рис.23.
50