

Diss / (Springer Series in Information Sciences 25) S. Haykin, J. Litva, T. J. Shepherd (auth.), Professor Simon Haykin, Dr. John Litva, Dr. Terence J. Shepherd (eds.)-Radar Array Processing-Springer-Verlag
.pdf90 U. Nickel
frequency
Fig. 3.16. Simulated SAR spectrum with quadratic phase errors: MUSIC algorithm. Bold line: spectrum without errors
spectral line model; in other words, it is less robust against this type of error than the Burg algorithm. In this case, the type of classification algorithm would determine which method should be preferred.
The height of the peaks of the superresolution spectra is not very meaningful because we have estimated spectral densities which may even have poles. Accurate power estimates for closely spaced spectral lines have to be done by the methods described in Sect. 3.4.3.
3.4Range, Amplitude, and Power Estimation
3.4.1Conventional Range Estimation
Conventional range estimation is done by filtering the target echo set) (the sum beam output) with a suitable filter function h(t):
ret) = Jh*(t - r)s(r)dr . |
(3.34) |
IR
The time sample tm with the maximum filtered output r(tm ) is taken for the corresponding range of the (point) target. Obviously, we obtain the maximum signal-to-noise ratio for h = s (matched filter). The shape of the correlation function ret) of the transmit waveform, with the receiving filter given in (3.34), determines the range accuracy and resolution.
3. Radar Target Parameter Estimation with Array Antennas |
91 |
If there is only one target present, we may increase the range accuracy by interpolating the time samples according to the shape of the function (3.34). Thus, we may determine the position of the maximum more accurately than the range bins given by the sampling period. This is a technique corresponding to the enhancement of angle accuracy by monopulse, see Sect. 3.2.1. This processing does not increase the resolution (the same as with monopulse), because the shape of the filter output is the same. .
The resolution can be increased by conventional means by choosing either shorter transmit waveforms, which limits the transmit power, or by choosing waveforms s(t) of increased bandwidth. For radar this is normally done by (linear) frequency modulation or by phase modulation. Binary phase coding or polyphase codes are more suited to digital processing. Of course, the resulting narrow peak filter output is, in this case, only given for target echoes without Doppler shift. For Doppler shifted echoes, the peak of the filter output may move to another range bin (range-Doppler ambiguity). The sidelobes may also increase. One is, therefore, interested in Doppler-tolerant codes. Polyphase codes are known for this property.
Because it is technically not a serious problem to increase the resolution by conventional means, i.e., by increasing the bandwidth using coded pulses, superresolution methods applied to range resolution have not attracted much interest.
3.4.2 Superresolution in Range
The spectral estimation superresolution techniques mentioned before cannot be applied to range estimation because there is no Fourier transformation involved in the filtering process. However, parametric target model fitting is also applicable. The expected signal is the filter output function. A superposition of these signals can then be matched to the received time series. The application of PTMF to range resolution has been studied in [3.77,78].
Example: Rectangular, Uncoded Pulse. If the transmitted waveform is a rectangular pulse of duration T, the matched filter output will be a triangular function of duration 2T. We will then fit a complex superposition of these triangular functions to the received data, i.e. we have to replace the columns of the matrix A in (3.24) by the corresponding transmission vectors:
( |
) _ {1- lkATtdlT, for IkATtil < T; otherwise |
|
ak t· |
- |
O. |
I |
|
|
In this expression k = 1, ... , N, i = 1, ... , M, AT is assumed sampling interval, and ti is the delay ofthe ith target. We may calculate the Cramer-Rao bound for this ML estimation, and apply all the techniques developed in Sect. 3.2.6. However, there are the following special problems:
a)In contrast to angle and frequency estimation, where the expected signal is a sine-wave, the expected signal here is a time-limited function. Ifwe sample (as
92 U. Nickel
usual) at the Nyquist rate LI T = T, we have only 3 samples that contribute to the model fitting. This means that the application of the PTMF method makes sense only if the waveform is significantly oversampled.
b)The expected signal, being a triangular function, is not differentiable. This means that all the convenient gradient methods, especially gradient-based stochastic approximation, cannot be used. Possible methods for minimization are, then, techniques based on a finite grid search. Fast methods to calculate the function Q, (3.28-31), are, therefore, of interest.
In particular, the systolic array processor of McWhirter [3.48], which solves the least-squares problem by QR decomposition, can be used to calculate the function (3.28); the latter is the linear least-squares solution of (3.26).
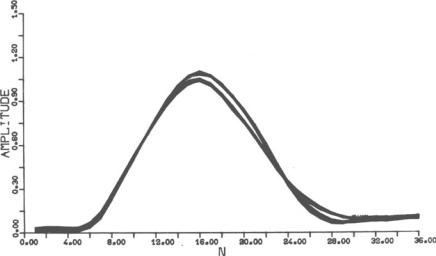
That the PTMF method can, in fact, be applied to range resolution has been demonstrated with the experimental multi-function phased array radar ELRA of FGAN-FFM. We have recorded the echoes of two closely spaced ground targets of opportunity. The exact range of these two targets was determined by using a short pulse waveform of 2 J1.sec duration. The data were then recorded with 10 J1.sec long pulses (i.e., 10 J1.sec resolution). However, the received signal was sampled at the high rate of 2 J1.sec. Figure 3.17 shows an amplitude plot of the received echoes which is a superposition of two echoes of the 10 J1.sec pulses. This superposition of two triangular functions resembles a single triangular function. In Fig. 3.17 we have plotted only the first and last 20 data vectors of the data series. Obviously, the two targets have, in some way, changed their positions or structure while the data were being recorded.
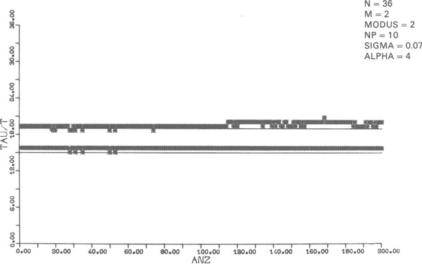
The result of PTMF range estimation is shown in Fig. 3.18. This figure shows the estimated time delay in units of the sampling interval T = 2 J1.s,
Fig.3.17. Amplitude/range plots of two closely spaced targets from measured data. 20 amplitudes at the beginning and 20 at the end of the data recording are plotted
94 U. Nickel
thus detect anti-phase multipath, in which case, the estimated directions (by superresolution) tend to be separated more than the true directions. This could help stabilize the low angle tracking.
- Complex Amplitude Estimation. If we want to see the time evolution of the complex amplitude, the least-squares formula (3.27) provides a good estimate:
6k = (AH A)-l AHzk .
For Gaussian-distributed data vectors z with expectation Ab and variance 1, the estimate 6is also the maximum likelihood estimate and is Gaussian distributed with expectation b and covariance (A H A)-I, [Ref. 3.16, p. 429].
- Target Power and Cross-power Estimation. For the analysis of multipath by superresolution methods for jammer localization we may be interested in estimating the signal covariance matrix B = E{bbH }, see (3.13). The number of uncorrelated sources could determine the number of jammers; correlated sources could be attributed to multipath propagation. Averaging the dyadic products of the above mentioned estimates for the complex target amplitudes, would result in a biased estimator. We have to remove the noise component in the data. A suitable estimator is, therefore,
(3.35)
where Rml is the ML estimator for the covariance matrix; see (3.8). The properties of the estimator (3.35) have been described in [3.60]. For Gaussiandistributed data, this estimate is the maximum likelihood estimate, and is also a least-squares estimate that minimizes the sum of squares
where. R is the parameterized covariance matrix as in (3.13).
3.5 Summary
In this chapter, we have described the problems and the potential of applying modern superresolution array processing methods to radar target parameter estimation problems. The most important application is that of angle estimation. The following statements on angle estimation can be made:
-Superresolution with arrays with a large number of elements/subarrays is preferred for robustness. Large numbers of degrees offreedom are also helpful in reducing accuracy requirements. The choice of the subarrays affects the performance of superresolution algorithms significantly.
-For radar angular superresolution, parametric target model fitting (PTMF) methods are the most effective. Resolution improvement by a factor of three
3. Radar Target Parameter Estimation with Array Antennas |
95 |
to four seems to be feasible with these methods. Refined models for the special multipath problem can yield resolution below even this value. For passive emitter localization, fast projection methods are also attractive.
-The problem will be to achieve the necessary accuracy for each channel at a reasonable price. The required processing speed will probably not be a limiting factor because of the rapid progress in systolic array algorithms and processing elements.
For special modes of operation of the radar, there are also applications for frequency and range estimation:
-For sampling rates significantly higher than the Nyquist rate, we can apply PTMF methods to range resolution.
-For target signature analysis (target classification), superresolution spectral estimation methods like the Burg algorithm or Kumaresan-Tufts method are useful.
All applications require automatic test procedures for determining the target number and perhaps the dimension of the signal subspace. The reliability of the methods in real situations depends heavily on the reliability of these tests. Postdetection validation of the presence of a target by checking the amplitude provides a possible method to enhance reliability. There is a strong need for realistic field experiments with superresolution methods.
References
3.1M.l. Skolnik: Radar Handbook (McGraw-Hili, New York 1970)
3.2W.D. Wirth: Signal processing for target detection.in experimental phased-array radar ELRA. lEE Proc. 128, Pt.F, No.5 311-316 (1981)
3.3W.D. Wirth: Phased array radar with solid state transmitter. Proc. Int. Conf. on Radar, Paris (1984) pp. 141-145
3.4A. Farina, F.A. Studer: Radar Data Processing, Vol. I (Wiley, Chichester, England 1985)
3.5S. Haykin, J.P. Reilly: Maximum likelihood receiver for low-angle tracking radar. Part 1: The symmetric case, lEE Proc. 129, Pt.F, No.4, 261-272 (1982) Part 2: The nonsymmetric case, ibid. No.5, 331-340 (1982)
3.6W.P. Ballance, A.G. Jaffer: Low-angle direction finding based on maximum likelihood: A unification Conf. Record of 21st Asilomar Conf. on Signals, Systems and Computers, Pacific Grove, CA (1987)
3.7J. Litva, J.P. Reilly, N.R. Fines: Very low-level propagation studies using superresolution and synthetic aperture antenna techniques. IEEE Syrnp. on Antennas and Propagation, Blacksburg, USA (1987) pp. 448-451
3.8R.M. Turner, E. Bosse: The use of highly refined propagation models in maximum likelihood estimation of target elevation for radar tracking of low altitude targets over sea, in Signal Processing IV: Theories and Applications, ed. by J.L. Lacoume, A. Chehikian, N. Martin, J. Malbos (North-Holland, Amsterdam 1988) 1097-1100.
3.9V. Kezys, S. Haykin: Multi-frequency angle-of-arrival estimation: An experimental evaluation. Proc. SPIE 975, 93-100 (1988)
3.10J. Reilly, J. Litva, P. Bauman: New angle-of-arrival estimator: comparative evaluation applied to the low-angle tracking radar problem, lEE Proc. 135, Pt.F, No.5, 408-420 (1988)
96 U. Nickel
3.11S. Haykin, T. Greenlay, J. Litva: Performance evaluation of the modified FBLP method for angle ofarrival estimation using real radar multipath data. lEE Proc. 132, Pt.F, No.3, 159-174 (1985)
3.12W.F. Gabriel: Using spectral estimation techniques in adaptive processing antenna systems. NRL Report 8920 (Oct. 1985), Washington, DC
3.13E. Brookner, J.M. Howell: Adaptive-adaptive array processing. lEE Conf. Publ. 281 (RADAR '87) (lEE, London 1987) pp. 257-263.
3.14U. Nickel: Angle estimation with adaptive arrays and its relation to superresolution. lEE Proc. 134, Pt.H, No.1, 77-82 (1987)
3.15H.L. Van Trees: Detection, Estimation, and Modulation Theory (Wiley, New York, 1968)
3.16R.J. Muirhead: Aspects of Multivariate Statistical Theory (Wiley, New York 1982)
3.17J.E. Evans, J.R. Johnson, D.F. Sun: High resolution angular spectrum estimation techniques for terrain scattering analysis and angle of arrival estimation. Proc. lst ASSP Workshop on Spectral Estimation, CRL McMaster University, Canada (1981).
3.18T.J. Shan, M. Wax, T. Kailath: Spatial smoothing approach for location estimation ofcoherent sources. IEEE Trans. ASSP-33, 806-811 (1985).
3.19S.u. Pillai, B.H. Kwon: Forward/backward spatial smoothing techniques for coherent signal identification, IEEE Trans. ASSP-37, 8-15 (1989)
3.20D.G. Childers (ed.): Modern Spectrum Analysis (IEEE, New York 1978)
3.21S.L. Marple: A new autoregressive spectrum analysis algorithm. IEEE ASSP-28, 441-454 (1980)
3.22S. Haykin (ed.): Nonlinear Methods in Spectral Analysis 2nd edn. Topics Appl. Phys. Vol. 34 (Springer, Berlin, Heidelberg 1983)
3.23S.M. Kay, L.L. Marple: Spectrum analysis - a modern perspective. Proc. IEEE 69,1380-1419 (1980)
3.24R. Kumaresan, D.W. Tufts: Estimating the angle of arrival of multiple plane waves, IEEE Trans. AES-19, 134-139 (1983)
3.25R.L. Kashyap: Inconsistency of the AIC rule for estimating the order of autoregressive models, IEEE Trans. AC-2S, 996-998 (1980)
3.26M. Wax, T. Kailath: Detection of signals by information theoretic criteria, IEEE ASSP-33, 387-392 (1985)
3.27T.M. Pukkila, P.R. Krishnaiah: On the use of autoregressive order determination criteria in univariate white noise tests. IEEE Trans. ASSP-36, 764-774 (1988)
3.28.Q.T. Zhang, P. Yip: On the use of ;\Atest in signal detection. Conf. Rec. IEEE ICASSP (1987) pp. 1111-1114
3.29G. Sharma, R. Chellappa: A model-based approach for estimation of two-dimensional maximum entropy power spectra, IEEE trans. IT-31, 90-99 (1985)
3.30L. Zou, B. Liu: On resolving two-dimensional sinusoids in white noise using different spectral estimates. IEEE Trans. ASSP-36, 1338-1350 (1988)
3.31V.F. Pisarenko: On the estimation ofspectra by means of nonlinear functions of the covariance matrix, Geophys. J.R. Astron. Soc. 28, 511-531 (1972)
3.32R.L. Johnson, G.E. Miner: Comparison of superresolution algorithms for radio direction finding. IEEE AES-22, 432-442 (1986)
3.33G.V. Borgiotti, L.J. Kaplan: Superresolution of uncorrelated interference sources by using adaptive array techniques, IEEE AP-27, 842--845 (1979)
3.34MA Lagunas, F. Vallverdu: Rayleigh estimates for high resolution dire'ction finding, in Underwater Acoustic Data Processing, ed. by. Y.T. Chan, NATO ASI Series E, 161 (Kluwer, Dordrecht 1989)
3.35R. Schmidt: Multiple emitter location and signal parameter estimation. IEEE AP-34, 276-280 (1986)
3.36G. Bienvenu, L. Kopp: Optimality of high resolution array processing using the eigensystem approach. IEEE ASSP-31, 1235-1248 (1983)
3.37B. Porat, B. Friedlander: Analysis of the asymptotic relative efficiency of the MUSIC algorithm. IEEE Trans. ASSP-36, 532-543 (1988)
3. Radar Target Parameter Estimation with Array Antennas |
97 |
3.38D.R. Farrier, DJ. Jeffries, R. Mardani: Theoretical performance prediction of the MUSIC algorithm. lEE Proc. 135, Pt.F No.3, 216-224 (1988)
3.39P. Stoica, A. Nehorai: MUSIC, Maximum Likelihood, and Cramer Rao bound. IEEE Trans. ASSP-37, 720-741 (1989)
3.40U. Nickel: Vergleich einiger Superauftosungsverfahren zur Spektralschiitzung. FFM-Report No. 317 (1982), Wachtberg F.R. Germany.
3.41H. Wang, M. Kaveh: On the performance'characterization of signal-subspace processing, 19th Asilomar Conf. (IEEE Compo Soc., Washington 1986) pp. 73-77
3.42A.G. Jaffer: Maximum likelihood angular resolution of multiple sources. 19th Asilomar Conf. (IEEE Compo Soc., Washington 1986) pp. 68-72
3.43E. Hung, R. Turner: A fast beamforming algorithm for large arrays. IEEE AES-19, 598-607 (1983)
3.44U. Nickel: Some properties of fast projection methods of the Hung-Turner type, in Signal Processing III: Theories and Application, ed. by I.T. Young, J. Biemond, R. Duio, J.J. Gerbrands (North-Holland, Amsterdam 1986) pp. 1165-1168
3.45D.H. Brandwood: Noise-space projection: MUSIC without eigenvectors. lEE Proc. 134, Pt.H, No.3, 303-309 (1987)
3.46C.C. Yeh: Projection approach to bearing estimations. IEEE ASSP-34, 1347-1349 (1986)
3.47U. Nickel: Algebraic formulation of Kumaresan-Tufts superresolution method, showing relation to ME and MUSIC methods. lEE Proc. 135, Pt.F No.1, 7-10 (1988)
3.48J.G. McWhirter: Recursive least-squares minimization using a systolic array, in Real Time Processing VI ed. by K. Bromley (Proc. SPIE 431, 105-112 (1983)
3.49W. Buhring: Improving convergence of adaptive antenna beamforrning by orthogonal preprocessing, in ... Signal Processing I: Theories and Applications, Conf. Rec. EUSIPCO-80
3.50J. Karhunen: Adaptive algorithms for estimating eigenvectors of correlation type matrices. Proc. ICASSP 1984, San Diego, pp. 14.6.1-4
3.51R. Schreiber: Implementation of eigenvector methods, in Real Time Signal Processing VII, SPIE 495, 3-6 (1984)
3.52R.D. DeGroat, R.A. Roberts: Highly parallel eigenvector update with application to signal processing, in Advanced Algorithms and Architectures for Signal Processing, SPIE 696, 62-70 (1986)
3.53R.P. Brent, F.T. Luk: The solution of singular value problems using systolic arrays, in Real Time Signal Processing VII, SPIE 495, 7-12 (1984)
3.54V.F. Pisarenko: The retrieval of harmonics from a covariance function. Geophys. J.R. Astron. Soc. 33, 347-366 (1973)
3.55J.A. Cadzow, Y.S. Kim, D.C. Shiue: General direction-of-arrival estimation: a signal subspace approach. IEEE Trans. AES-25, 31-47 (1989)
3.56A. Paulraj, R. Roy, T. Kailath: Estimation of signal parameters via rotational invariance techniques - ESPRIT, Conf. Rec. of 19th Asilomar Conf., Pacific Grove, CA (1985) (IEEE Compo Soc. Washington 1986)
3.57R. Roy, A. Paulraj, T. Kailath: Comparative performance of ESPRIT and MUSIC for direction-of-arrival estimation, Conf. Rec. IEEE ICASSP (1987) pp. 2344-2347
3.58J.M. Speiser: Some observations concerning the ESPRIT direction finding method. SPIE Int. Techn. Symp., San Diego 1987, SPIE Proc. Vol. 826
3.59U. Nickel: Superresolution by spectral line fitting, in Signal Processing II: Theories and Applications ed. by H.W. Schussler (North-Holland, Amsterdam 1983) pp 645-648
3.60J.F. Bohme: Estimation of spectral parameters of correlated signals in wavefields. Signal Processing 11, 329-337 (1986)
3.61U. Sandkuhler: Maximum-Likelihood Schiitzer zur Analyse stationiirer Wellenfelder. VDI Reihe 10, Nr. 75 (VDI Dusseldorf 1987) (Dr Thesis, Faculty of Electrical Engineering, RuhrUniversity of Bochum)
3.62A.A. Ksienski, R.B. McGhee: A decision theoretic approach to the angular resolution and parameter estimation of multiple targets. IEEE Trans. AES-4, 443-455 (1968)
98 U. Nickel
3.63G.E. Pollon, G.W. Lank: Angular tracking of two closely spaced radar targets. IEEE Trans. AES-4, 541-550 (1968)
3.64J.F. Bohme, D. Kraus: On least-squares methods for direction of angle of arrival estimation in the presence of unknown noise fields. Conf. Rec. IEEE ICASSP 1988
3.65Maximum likelihood estimation of the parameters of multiple sinusoids from noisy measurements. IEEE Trans. ASSP-37, 378-392 (1989)
3.66K. Bauer: Direkt-Iosende Algoritbmen fUr die Interferenzanalyse, Frequenz 30 76-81, llCi115 (1982)
3.67W.B. Gordon: Improved three subaperture method for elevation angle estimation. IEEE Trans. AES-19, 114-122 (1983)
3.68J.E. Hudson: Decomposition of antenna signals into plane waves. lEE Proc. 132 Pt.H, No.1, 53-57 (1985)
3.691. Ziskind, M. Wax: Maximum likelihood localization of multiple sources by alternating projectious. IEEE Trans. ASSP-36 1553-1560 (1988)
3.70A.J. Weiss, A.S. Willsky, B.C. Levy: Maximum likelihood array processing for the estimation of superimposed signals. Proc. IEEE. 76, 203-205 (1988)
3.71W.D. White: Low-angle tracking in the presence of multipath. IEEE Trans. AES-I0, 835-852 (1974)
3.72W.D. White: Double-null tracking at low angles, in Proc. Mil. Microwaves Conf., London (1978) pp. 127-136
3.73S. Haykin, J. Kesler, J. Litva: Evaluation of angle of arrival estimators using real multipath data, in Proc. IEEE ICASSP, Boston (1983) pp. 695-698
3.74U. Nickel: Subarray configurations for interference suppression with phased array radar, in Conf. Rec. Int. Conf. on Radar, Paris (1989) pp. 82-86
3.75U. Nickel: Superresolution using an active antenna array. lEE Conf. Publ. 216 (1982) (RADAR '82)
3.76Y. Bresler, A. Macovski: On the number of signals resolvable by a uniform linear array. IEEE Trans. ASSP-34, 1361-1375 (1986)
3.77G.V. Trunk: Range resolution of targets. IEEE Trans. AES-20, 789-797 (1984)
3.78F. Miinzel: Optimale Pulslagebestimmung bei wenigen Stiitzwerten, AEU Band 36, Heft 4 (1982) pp. 160-164
4.Exact and Large Sample Maximum Likelihood Techniques for Parameter Estimation and Detection in Array Processing
B. Ottersten, M. Viberg, P. Stoica, and A. N ehorai
With 7 Figures
Sensor array signal processing deals with the problem of extracting information from a collection of measurements obtained from sensors distributed in space. The number of signals present is assumed to be finite, and each signal is parameterized by a finite number of parameters. Based on measurements ofthe array output, the objective is to estimate the signals and their parameters. This research area has attracted considerable interest for several years. A vast number of algorithms has appeared in the literature for estimating unknown signal parameters from the measured output of a sensor array.
The interest in sensor array processing stems from the many applications where emitter waveforms are nlcasured at several points in space and/or time. In radar applications, as discussed in Chaps. 2 and 3, the objective is to determine certain parameters associated with each return signal; these may include bearing, elevation, doppler shift, etc. By using an array of antenna receivers, the accuracy with which the signal parameters can be determined is greatly improved when compared to single-receiver systems.
As the signal environment becomes more dense in both space and frequency, sensor arrays will playa more significant role in the field ofradio and microwave communications. Communication satellites placed in geostationary orbits are faced with an increasing amount of channel interference because of limited space and a limited frequency band. By utilizing the spatial selectivity that may be obtained with an array of sensors, satellites operating in the same frequency band can be placed close together without unacceptable interference. Mobile communication systems are faced with the same problem. An increasing demand for mobile telephones and a limited bandwidth has increased the number of base stations serving an area. If a base station is equipped with a collection of receiving antennas, the spatial dimension can be used to distinguish emitters. By appropriately processing the output of the antenna array, undesirable noise and interference can be suppressed in favor of the signal-of-interest.
Underwater arrays with acoustical sensors (hydrophones) are frequently used in surveillance. Several hydrophones are either towed behind a vessel or dropped in the ocean to passively measure acoustical energy from other vessels. The objective is to detect and estimate incoming signals in order to locate and identify vessels. In geophysical exploration the ground is often excited by a detonation, and waves reflected from boundaries between layers in the earth are sensed by an array of geophones. By identifying the wavefronts arriving at the array, information about the structure of the earth is inferred.
Springer Series in Information Sciences, Vol. 25 |
Radar Array Processing |
Eds.: S. Haykin 1. Litva T. J. Shepherd |
© Springer-Verlag Berlin, Heidelberg 1993 |