

Для магистратуры / CMOS_IC
.pdf230
нейности в них используют симметричные схемы с симметричными ОУ. В качестве примера рассмотрим МОП-С реализацию фильтра Тоу – Тома-
са, рис.2.10.
Рис.2.10. Симметричный МОП-С фильтр Тоу – Томаса
Симметрия схемы позволяет ограничиться двумя ОУ. Сопротивление транзисторов MR может регулироваться управляющим напряжени-
ем VG: R =1 k(VGS − Vt ) . Как следует из формул (2.15) размеры тран-
k(VGS − Vt ) . Как следует из формул (2.15) размеры тран-
зисторов MR определяют резонансную частоту, MRQ – добротность, MR/K – коэффициент передачи фильтра.
Основным недостатком активных фильтров (RC и МОП-С) является низкая точность параметров пассивных элементов. Это относится как к сопротивлениям резисторов, так и к сопротивлениям МОП транзисторов. В последнем случае имеется возможность подстройки сопротивлений непосредственно в процессе работы.

231
Глава 3. Gm-С фильтры
3.1. Транскондуктивные усилители
Основная идея Gm-C фильтров – использовать в качестве резисторов линейные схемы на основе МОП транзисторов с автоподстройкой. В такие схемы называют транскондуктивными усилителями (ТУ) или, проще, транскондукторами, а их условное обозначение аналогично операционным трансформирующим усилителям (ОТУ), рис.3.1.
Рис.3.1. Условное обозначение транскондуктивного усилителя: а – обычного; б – симметричного
Передаточная характеристика ТУ связывает входное напряжение с выходным током т.е.
IO = Gm ×Vi , |
(3.1) |
где: IO – выходной ток ТУ, Gm – крутизна ТУ,
Vi – входное напряжение ТУ.
Несмотря на некоторое сходство ТУ с ОТУ, в том числе и по условному обозначению, их свойства и назначение различны. ОТУ – универсальный усилитель с большим коэффициентом усиления по напряжению. Они имеют высокую крутизну, но ее разброс не имеет значения. В ТУ крутизна является основным параметром и для ее точной установки используется автоподстройка.
Для реализации ТУ используют различные подходы. Основной задачей является достижение высокой линейности передаточной характеристики (3.1).
У МОП транзисторов в линейном (ненасыщенном) режиме ток стока ID почти линейно зависит от напряжения между стоком и истоком VDS , пока оно мало VDS < V0 = VGS–Vt (меньше, чем эффективное напряжение).

232
ID ≈ β V0 VDS . |
(3.2) |
Иногда используют разностный ток Id двух одинаковых транзисторов в активном режиме (режиме насыщения), который также линейно зависит от разности напряжений на затворах
Id = ID1 − ID2 = β 2 [(VG1 − Vt )2 −(VG2 |
− Vt )2 ]= |
β 2 (VG1 + VG2 − 2 Vt ) (VG1 − VG2 ) |
(3.3) |
|
В обоих случаях последний сомножитель – входной сигнал, а предыдущий сомножитель – сигнал управления, определяющий крутизну.
Во многих случаях для компенсации гармоник целесообразно использовать балансные (дифференциальные) схемы с дополнительной обратной связью по синфазной составляющей.
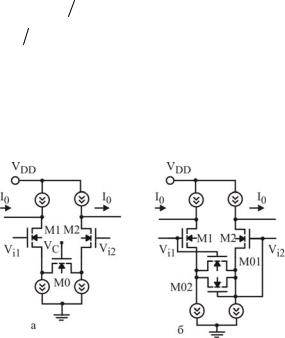
Транскондукторы с транзисторами в активном (насыщенном)
режиме. Простейший инвертирующий усилитель при малых сигналах обладает линейностью, но у него отсутствует возможность подстройки. Комплементарная пара, рис.3.2,а, служит аналогом МОП транзистора и допускает подстройку.
Рис.3.2. Комплементарная пара (а) и транскондуктор (б)
В режиме насыщения обоих транзисторов ее выходная ВАХ при одинаковых п-МОП и р-МОП имеет вид
ID = βnp (VGS−np − Vtnp )2 , |
(3.4) |
233
где βnp = β/4, Vtnp = Vtn + Vtp = 2Vt, VGS-np – разность напряжений на затворах, рис.3.2,а.
Соединением двух комплементарных пар можно реализовать симметричный инвертор, рис.3.2,б, и для него
I |
O |
= I |
1 |
− I |
2 |
= β 4 |
(V − V − 2 V )2 |
−β 4 |
(V + V − 2 V )2 = |
||
|
|
|
|
C i |
t |
|
C i |
t |
|||
2 β (VC − 2Vt ) Vi |
|
|
. |
(3.5) |
|||||||
Отсюда |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Gm = 2 β (VC − 2Vt ) |
(3.6) |
|||
Таким образом с помощью VC можно управлять крутизной такого
ТУ.
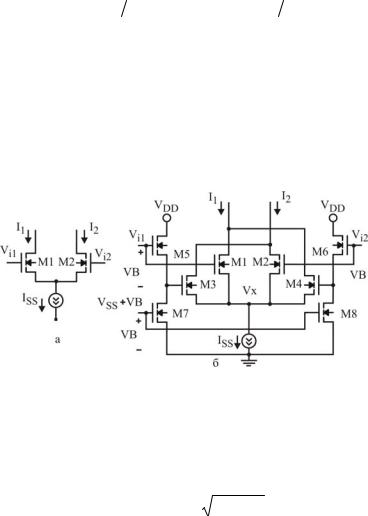
Примером ТУ с транзисторами в активном режиме является обычный дифференциальный усилитель малых сигналов, рис.3.3,а.
Рис.3.3. Дифференциальный усилитель (а) и симметричный транскондуктор (б)
Крутизна такого ТУ, при |
|
)2 |
|
β(V |
− V |
(3.7) |
|
i1 |
i2 |
<<1 |
|
8 ISS |
|
|
|
составляет |
|
|
|
Gm |
2 β ISS |
(3.8) |
|
234
Таким образом, при достаточно большом токе ТУ работает в режиме близком к линейному. А сама величина Gm может управляться величиной тока.
Можно управлять крутизной дифференциального каскада напряжением, если использовать перекрестную дифференциальную пару, рис.3.3,б, для которой
I1 − I2 = β 2{(Vi1 − VX − Vt )2 + (Vi2 − VB − VX − Vt )2 } |
|
−β 2{(Vi2 − VX − Vt )2 + (Vi1 − VB − VX − Vt )2 |
}= β VB (Vi1 − Vi2 ) |
Откуда |
(3.9) |
|
|
Gm = β VB |
(3.10) |
Транскондукторы с транзисторами в линейном (триодном)
режиме. ТУ с транзисторами в линейном режиме изображен на рис.3.4.
Рис.3.4. Транскондуктор на транзисторах в линейном режиме (а) и он же с улучшенной линейностью (б)
Фактически это дифференциальный усилитель с улучшенной линейностью. Поскольку все генераторы тока идентичны, то разностный ток в транзисторах М1 и М2, создаваемый входными напряжениями Vi1 и Vi2 поступает в выходную цепь. В силу идентичности транзисторов разность входных напряжений приложена к транзистору М0, находящемуся в линейном режиме. Поэтому разностный ток IO пропорционален разности напряжений, крутизна ТУ составляет при β1>>β0.
235
Gm = |
|
IO |
= β0 |
(VGS0 |
− Vt ) |
(3.11) |
|
Vi1 |
− Vi2 |
||||||
|
|
|
|
|
С помощью управляющего напряжения VC она может корректироваться. Для схемы требуется управление по синфазной составляющей
Линейность схемы можно улучшить при управлении линейным элементом от входных сигналов, для чего он разбивается на два транзистора М01и М02. В результате крутизна подобного ТУ
Gm = |
|
IO |
= |
β1 β01 |
I |
(3.12) |
|
Vi1 |
− Vi2 |
(β1 + 2 β01 ) β1 2 |
|||||
|
|
|
|||||
Для уменьшения линейных искажений β1  β01 ≈ 7
β01 ≈ 7
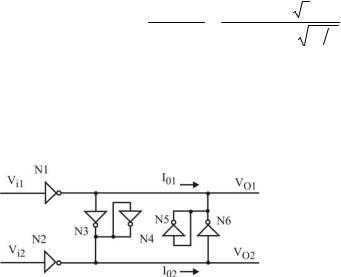
ТУ на инверторах Для высокочастотных ТУ целесообразно использовать схемы, не имеющие внутренних узлов. Кроме того, желательно максимально увеличить выходное сопротивление на высоких частотах. Таким противоречивым требованиям частично удовлетворяют схемы ТУ на инверторах, рис.3.5.
Рис3.5. Транскондуктор на инверторах
Разность выходных токов двух одинаковых инверторов (N1 и N2)
IO = IO1 −IO2 = 2 β (VDD  2 − Vt ) (Vi1 − Vi2 ) = gm (Vi1 − Vi2 ) ,
2 − Vt ) (Vi1 − Vi2 ) = gm (Vi1 − Vi2 ) ,
(3.13)
где gm – крутизна инвертора.
Инверторы N3 – N6 образуют схему с положительной обратной связью, обладающую отрицательным дифференциальным сопротивлением, увеличивающим выходное сопротивление. В результате вход (Vi1 – Vi2) поступает на выход (V01 – V02) с усилением

236
Ad = |
gm |
, |
(3.14) |
|
|||
|
3gO |
|
|
где gO – выходное сопротивление инвертора. Усиление синфазных сигналов
Acm = |
gm |
(3.15) |
|
3gO + 2gm |
|||
|
|
остается меньше единицы, обеспечивая устойчивость схемы.
Основные схемы на ТУ. Транскондуктор является линейным элементом.
От линейного резистора он отличается однонаправленностью, т.е. наличием входа (потенциального) и выхода (токового). Его можно преобразовать в резистор с проводимостью равной Gm, если вход соединить с выходом, рис.3.6. Причем резистор включен между узлом и общим узлом (землей), рис.3.6,а, или между двумя узлами, рис.3.6,б.
Рис.3.6. Схемы на транскондукторах: а – резистор; б – симметричный резистор; в
– усилитель напряжения; г – симметричный усилитель напряжения
От ОУ ТУ отличается типом выхода, но соединением ТУ можно получить и усилитель напряжения как несимметричный, рис.3.6,в, так и симметричный, рис.3.6,г, с коэффициентом усиления равным отношению проводимостей входного и выходного ТУ: K=Gm1/Gm2.
237
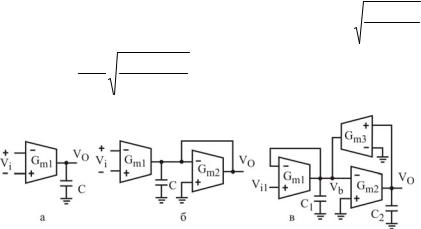
3.2. Gm-С фильтры на транскондуктивных усилителях
Gm–C фильтры с ТУ. В сочетании с емкостями транскондуторы позволяют строить произвольные линейные фильтры. На рис. 3.7. приведены простейшие фильтры, в том числе:
интегратор с передаточной функцией H(s) = − |
Gm1 |
, рис.3.7,а; |
||||||||
C |
||||||||||
|
|
|
|
= Gm2 , |
|
|
|
|
||
фильтр первого порядка с ω0 |
H(0) = |
|
Gm1 , рис.3.7,б; |
|||||||
|
|
|
|
C |
|
|
|
Gm2 |
|
|
НЧ |
фильтр второго |
|
порядка |
|
с |
ω = |
Gm2Gm3 , |
|||
|
|
|
|
|
|
|
0 |
C1C2 |
||
|
|
|
|
|
|
|
|
|
||
Q = |
1 |
C1Gm2Gm3 , |
H(0) = Gm1 |
|
, рис.3.7,в. |
|
||||
|
Gm1 |
C2 |
|
Gm3 |
|
|
|
|
||
Рис.3.7. Gm–C фильтры с ТУ: а – интегратор; б – фильтр первого порядка; в – фильтр второго порядка
Достоинством приведенных Gm–C фильтров с ТУ является высокое быстродействие, так как интеграторы не содержат конденсаторов в цепях обратной связи.
За это приходится платить большой амплитудой сигналов.
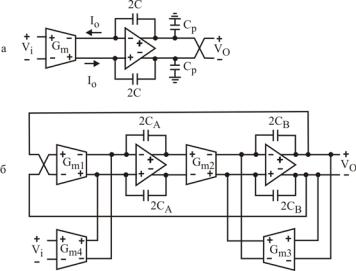
Gm–C фильтры с ТУ и ОУ. Использование операционных усилителей в Gm–C фильтрах, позволяет снизить амплитуды сигналов и уменьшить влияние паразитных емкостей. Симметричный вариант Gm–C интегратора с ОУ и ФНЧ второго порядка приведены на рис.3.8,а и рис.3.8,б, соответственно.
238
Рис.3.8. Gm–C фильтры с ТУ и ОУ: а – интегратор; б – ФНЧ второго порядка
Передаточная функция ФНЧ фильтра имеет вид
|
|
|
|
|
Gm2Gm4 |
|
|
|||
H(s) = |
|
|
|
|
CA CB |
|
|
|||
|
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
||||||
|
|
Gm3 |
|
Gm1Gm2 |
|
|||||
|
s |
|
+ |
|
|
s |
+ |
|
|
|
|
CB |
|
CA CB |
|||||||
|
|
|
|
|
|
|
||||
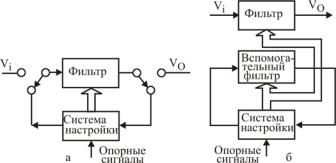
Настройка Gm–C фильтра. В составе Gm–C фильтра обязательно должна быть схема автоподстройки. Обычно она строится на основе схем фазовой автоподстройки частоты (ФАПЧ) или автоматической регулировки усиления (АРУ). Существует два основных подхода к построению системы автоподстройки: с разделением по времени, и с использованием вспомогательного фильтра. В первом случае, рис.3.9,а, по команде управления фильтр отключается от основной системы и переходит в режим автоподстройки.
239
Рис.3.9. Настройка Gm–C фильтра: а – с разделением по времени; б – с вспомогательным фильтром
Во втором – непрерывно производится подстройка параметров вспомогательного фильтра, идентичного основному фильтру, и сигнал его настройки поступает и на основной фильтр, рис.3.9,б. В обоих случаях в систему настройки подаются опорные сигналы, позволяющие оценить параметры фильтра (например, его добротность).
Gm–C фильтры, как и ранее рассмотренные ARC фильтры, являются фильтрами с непрерывным временем (Т-фильтры), которые естественным образом сопрягаются с аналоговыми схемами.