

Задание на курсовой проект
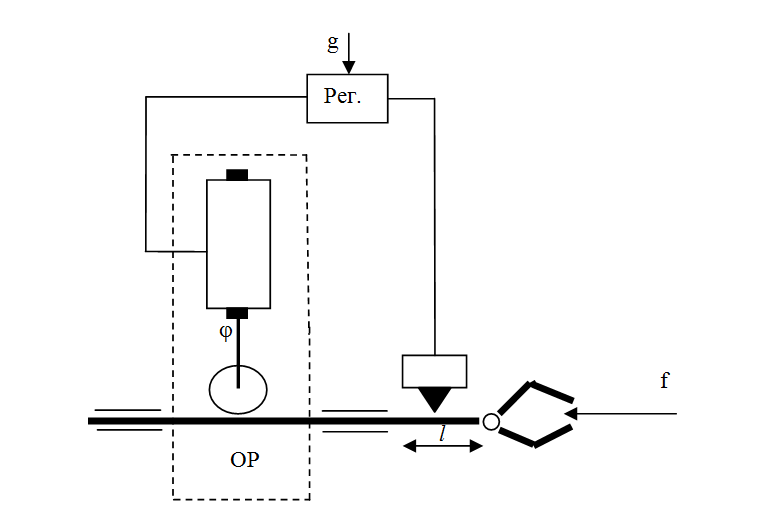
Рис.1. САУ перемещением захвата робота
2. Показатели качества регулирования:

3. Тип нелинейности: б
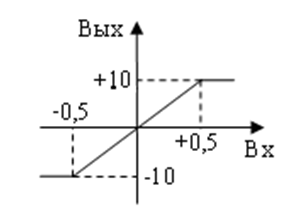
Рис.2.
4. Метод устойчивости: Найквиста.
5. Параметры объекта регулирования:

Кд=1.2 , Тм=0.5 , Кпр=6 , Тпр=0.1 , Ку=4 , Кос=0.25
6. D - разбиение по параметру Кпр.
1. Структурная схема сау:
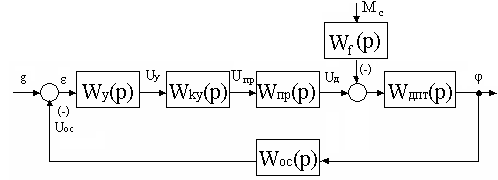
Рис.3 Структурная схема САУ.
Wу(p) -передаточная функция усилителя;
Wку(p) -передаточная функция будущего корректирующего устройства;
Wпр(p) -передаточная функция преобразователя;
Wдпт(p) -передаточная функция двигателя постоянного тока;
Wос(p) -передаточная функция обратной связи;
Wf
(p)
- передаточная функция возмущения на
двигатель.
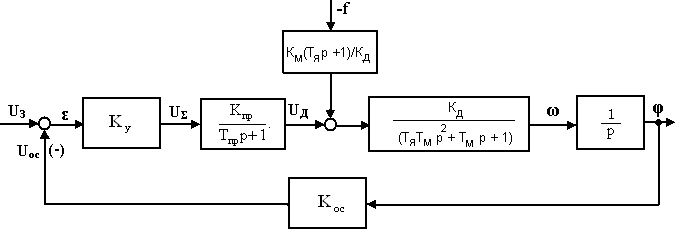
Рис. 4 Модель разрабатываемая в САУ
Полученная схема строится в среде программы SyAn с использованием заданных значений. Полученная схема представлена на рисунке 6. Элемент, соответствующий ДПТ, состоит из двух блоков. Он был синтезирован средствами программы ввиду специфичности передаточной функции (ПФ такого вида нет в стандартной библиотеке).

Рис. 5 – Структурная схема САУ в пакете SyAn
Передаточные функции отдельных звеньев.

Преобразователь:
Где Кпр- коэффициент усиления преобразователя. Тпр- постоянная времени преобразователя.
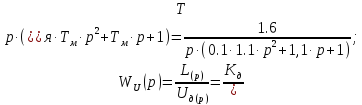
Где L -линейное перемещение захвата робота: Uд - подводимое к двигателю напряжение; F- момент нагрузки
Кд- коэффициент передачи между входной и выходной переменными,
включающий коэффициент усиления самого двигателя и
передаточное число редуктора.
Тя- электромагнитная постоянная двигателя.
Тм- механическая постоянная времени, учитывающая момент инерции
двигателя и редуктора.
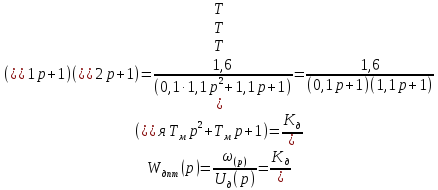
Возмущение:
 =
=
Где Км- коэффициент пропорциональности между моментом нагрузки и током в цепи питания.
 =0.25
где Кос-
коэффициент обратной связи
2.
Передаточные
функции
отдельных звеньев
САУ:
=0.25
где Кос-
коэффициент обратной связи
2.
Передаточные
функции
отдельных звеньев
САУ:
Пользуясь правилами преобразования структурных схем найти передаточную функцию разомкнутой САУ, а также замкнутых САУ - по управляющему и возмущающему воздействиям и по ошибкам от этих воздействий. Сравнить между собой характеристические уравнения замкнутой и разомкнутой систем и указать их общность и различие.
2.1. Передаточная функция разомкнутой САУ:
 Подставив
выражения для ПФ звеньев, а также заданные
значения можно получить ПФ разомкнутой
цепи (в контуре С-В) в виде:
Подставив
выражения для ПФ звеньев, а также заданные
значения можно получить ПФ разомкнутой
цепи (в контуре С-В) в виде:



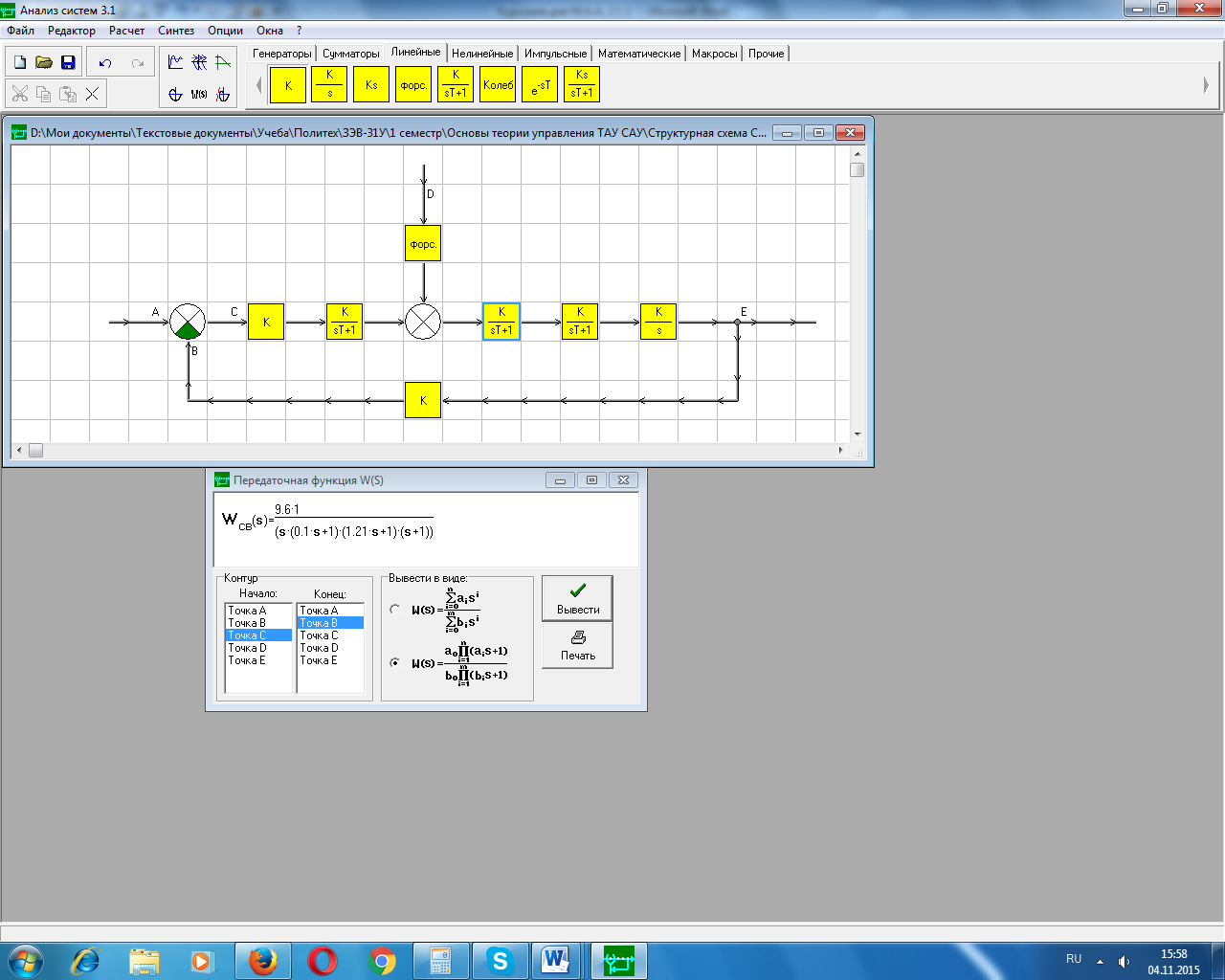
Рис. 6 Wраз(p) в SiAn
2.2. Передаточная функция замкнутой САУ по управляющему воздействию:

Подставив выражения для ПФ звеньев, а также заданные значения можно получить ПФ замкнутой цепи (контур А-Е) в виде:





Рис. 7 Wзам(p) в SiAn
2.3.Передаточная
функция в контуре D-E:
Для
устройств передвижения захвата робота
Рис.1 объектом регулирования является
непосредственно двигатель постоянного
тока (ДПТ) независимого возбуждения с
редуктором (червячным или реечным) и
конкретным рабочим органом. Он же
является и исполнительным механизмом.
В этом случае с учетом передаточного
числа редуктора и приведенных к валу
двигателя моментов инерции рабочих
органов и редукторов передаточные
функции объекта по управлению и возмущению
необходимо принять в виде:


В соответствии с передаточными
функциями ДПТ с независимым возбуждением
по управляющему и возмущающему
воздействиям структурная схема имеет
вид, представленный на Рис.4.

Рис.8. Структурная схема ДПТ с независимым возбуждением
Структурная схема двигателя постоянного тока независимого возбуждения (рис.6) в зависимости от соотношения постоянных времени якорной цепи Тя и Тм представляется или колебательным звеном, или апериодическим 2-го порядка (раскладывается на последовательное соединение двух апериодических звеньев 1-го порядка), т.е.:
Исходные данные: Кд=1,6; Км=0,09; Тя=0,1; Тм=1,1.
В нашем случае 4Тя Тм = 4∙0,1 1,1 = 0,4 1,1 (корни знаменателя действительные), где: Tя ∙ Tм = T1 ∙ T2; Tм = T1+ T2 =1,1 ; отсюда Т2=Тм-Т1=1,1-Т1; Tя ∙ Tм =0,1∙1,1=0,11 = Т1(1,1-Т1); -Т12+1,1∙ Т1-0,11=0 или Т12-1,1∙ Т1+0,11=0. Корни уравнения: ([-b+-√(b2-4ac)]/2a): [1,1+-√(1,12-4*0.11)]/2*0.11= =[1,1+-√(1,21-0,44)]/2*0.11=[1,1+-√(0,77)]/0,22= Т1=1,1+0,87/0,22=8,95454 Т2=1,1-0,87/0,22=1,04545 0,11∙р2+1,1р+1=(8,95454р+1)∙(1,04545р+1)

ω1= =0,1786
; ω2=
=0,1786
; ω2= =1,5304
=1,5304

ω3= =17,77
В
качестве преобразователей могут
использоваться: TPП
- транзисторные преобразователи, ТП -
тиристорные преобразователи постоянного
тока, ШИП - широтно-импульсные
преобразователи. Для всех случаев
принимается передаточная функция
преобразователя в виде:
=17,77
В
качестве преобразователей могут
использоваться: TPП
- транзисторные преобразователи, ТП -
тиристорные преобразователи постоянного
тока, ШИП - широтно-импульсные
преобразователи. Для всех случаев
принимается передаточная функция
преобразователя в виде:
Преобразователь:
Вид и параметры корректирующего устройства рассчитываются . Целесообразно устанавливать корректирующее устройство между промежуточным усилителем и тиристорным преобразователем. Обобщенные структурные схемы для различных САУ приведены на рис.3, а конкретные модели на рис.4.
2.4. Передаточная функция САУ по ошибке от управляющего воздействия:

2.5.
Передаточная
функция
САУ
по
возмущающему
воздействию:

2.6.
Передаточная
функция
САУ
по
ошибки
от
возмущающего
воздействия:

2.7. Сравнение характеристических уравнений замкнутой и разомкнутой САУ:
характеристическое уравнение замкнутой САУ:

характеристическое уравнение разомкнутой САУ:

Характеристические уравнения замкнутой и разомкнутой систем имеют одинаковый порядок и одинаковые коэффициенты, а отличаются только свободным членом. В характеристическом уравнении разомкнутой системы он равен единице, а в характеристическом уравнении замкнутой системы – 10.6. Это влияет на быстродействие системы: уменьшается время регулирования и увеличивается перерегулирование.