

1. 3. Частные случаи движения.@
1.
Равномерное
прямолинейное движение:
![]() ;
;![]() ;
;![]() ;
;
![]() .
.
Уравнение
движения:
![]() или
или
![]() ;
;
![]() ;
;
![]() .
.
2.
Прямолинейное равнопеременное движение:
![]() ,
,
![]() ;
;
![]()
При
равноускоренном движении а0,
при равнозамедленном а0.
Уравнение движения:
![]() или
или
![]() ,
, ![]() ,
, ![]() .
.
Уравнение
пути, пройденного точкой при равнопеременном
движении, можно получить при интегрировании
формулы
![]() по времени от 0 до t.
по времени от 0 до t.

3.
Прямолинейное
переменное движение:
![]() ,
,![]()
4. Равномерное
криволинейное движение:
![]() ,
,![]()
5.
Равномерное
движение по окружности:
![]() ,
,![]() ,
,![]() ,
,![]() .
Этот вид движения следует рассмотреть
подробнее.
.
Этот вид движения следует рассмотреть
подробнее.
1. 4. Кинематические характеристики вращательного движения. @
Вращательным называется такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
П усть
точка или абсолютно твердое тело за
времяt,
вращаясь вокруг неподвижной оси ОО’,
перешло из положения 1 в 2, повернувшись
на угол .
Скалярная величина
есть угловой путь (рис.5.1). Элементарные
(бесконечно малые) повороты можно
рассматривать как векторы. Модуль такого
вектора равен углу поворота d,
а направление определяется по
правилу правого винта: если винт вращать
в направлении движения точки по
окружности, то поступательное
движение его острия указывает направление
вектора
усть
точка или абсолютно твердое тело за
времяt,
вращаясь вокруг неподвижной оси ОО’,
перешло из положения 1 в 2, повернувшись
на угол .
Скалярная величина
есть угловой путь (рис.5.1). Элементарные
(бесконечно малые) повороты можно
рассматривать как векторы. Модуль такого
вектора равен углу поворота d,
а направление определяется по
правилу правого винта: если винт вращать
в направлении движения точки по
окружности, то поступательное
движение его острия указывает направление
вектора
![]() .
Такие вектора, направление которых
связывается с направлением вращения,
называются псевдовекторами.Быстрота
вращения характеризуется вектором
угловой скорости
.
Такие вектора, направление которых
связывается с направлением вращения,
называются псевдовекторами.Быстрота
вращения характеризуется вектором
угловой скорости![]() ,
направленной вдоль оси вращения как
и
,
направленной вдоль оси вращения как
и![]() .
Средняя угловая скорость
.
Средняя угловая скорость
![]() .
Мгновенная угловая скорость
.
Мгновенная угловая скорость .Изменение
.Изменение
![]() со временем определяет вектор углового
ускорения
со временем определяет вектор углового
ускорения![]() .
Среднее угловое ускорение
.
Среднее угловое ускорение
![]() .
Мгновенное угловое ускорение
.
Мгновенное угловое ускорение ;
;![]() .
При вращении тела вокруг неподвижной
оси изменение вектора
.
При вращении тела вокруг неподвижной
оси изменение вектора![]() обусловлено только изменением его
численного значения. Поэтому
обусловлено только изменением его
численного значения. Поэтому![]() направлен вдоль оси вращения. Если
вращение ускоренное, то направления
направлен вдоль оси вращения. Если
вращение ускоренное, то направления![]() и
и![]() совпадают (0);
если замедленное – то они противоположны
(0).
При равнопеременном движении точки по
окружности (=const)
совпадают (0);
если замедленное – то они противоположны
(0).
При равнопеременном движении точки по
окружности (=const)
![]() ,
,![]() ,
где0
– начальный угол поворота, 0
– начальная угловая скорость.
,
где0
– начальный угол поворота, 0
– начальная угловая скорость.
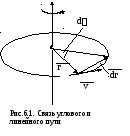
1. 5. Связь между линейными и угловыми кинематическими характеристиками. @
Пусть
за малый промежуток времени dt
материальная точка повернулась
относительно оси вращения на малый
угол d
(рис.6.1). По ранее приведенной формуле
линейная скорость
![]() .
При малых углах поворота перемещениеdr
можно считать равным произведению
радиуса вращения r
на угол поворота d,
т.е.
.
При малых углах поворота перемещениеdr
можно считать равным произведению
радиуса вращения r
на угол поворота d,
т.е.
![]()
 .
Отсюда
.
Отсюда![]() =r.
В векторном виде связь линейной скорости
=r.
В векторном виде связь линейной скорости
![]() и угловой
и угловой![]() можно представить с помощью векторного
произведения
можно представить с помощью векторного
произведения![]() ,
,![]() .
При вращении вокруг неподвижной оси
угол между векторами
.
При вращении вокруг неподвижной оси
угол между векторами![]() и
и![]() равен
равен![]() ,
следовательно
,
следовательно![]() .
Отсюда можно получить еще одно выражение
для тангенцального ускорения
.
Отсюда можно получить еще одно выражение
для тангенцального ускорения![]() .
Учитывая направление, связь тангенциального
и углового ускорений можно записать
в векторном виде
.
Учитывая направление, связь тангенциального
и углового ускорений можно записать
в векторном виде![]() ,
а также для
,
а также для![]() или
или![]() .
Знак «минус» в формуле обусловлен
противоположной направленностью
векторов
.
Знак «минус» в формуле обусловлен
противоположной направленностью
векторов![]() и
и![]() .
.
Если вращение
равномерное, то
![]() ,
и его можно характеризовать периодом
вращения Т. Т – время одного полного
оборота точки (тела) вокруг оси.
,
и его можно характеризовать периодом
вращения Т. Т – время одного полного
оборота точки (тела) вокруг оси.
![]() ;
; ![]() ;
;![]() ;
;![]()
n
– число оборотов в единицу времени,
частота вращения. При равномерном
вращении
![]() ,
,![]() .
.