

1. Кинематика поступательного и вращательного движения. @
Кинематика изучает движение тел, не рассматривая причины, вызывающие это движение.
1.1. Система отсчета. Радиус‑вектор материальной точки. @
Простейшим примером механического движения является движение материальной точки. Материальная точка – это модель реального тела, размерами которого в данной задаче можно пренебречь. Для описания механического движения необходимо ввести тело отсчета и систему отсчета.
Т
Рис.1.1. Радиус-вектор
и его состовляющие в декартовой системе
координат.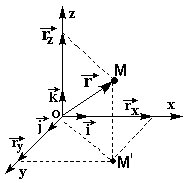
Пусть
точка М движется в пространстве. На
рис.1.1 представлены тело отсчета О и
связанная с ним прямоугольная декартова
система координат. Вектор,
соединяющий начало (тело) отсчета с
точкой М, есть радиус-вектор этой точки
![]() .
Из точки М опустим перпендикуляры на
ось OZ
и плоскость ХОY.
Из точки М’ проведем перпендикуляры
к осям ОХ и OY.
Векторы
.
Из точки М опустим перпендикуляры на
ось OZ
и плоскость ХОY.
Из точки М’ проведем перпендикуляры
к осям ОХ и OY.
Векторы
![]() на координатных осях называются
составляющими радиуса-вектора. Пользуясь
правилом сложения векторов можно
получить
на координатных осях называются
составляющими радиуса-вектора. Пользуясь
правилом сложения векторов можно
получить
![]()
Модули
![]() ,
,![]() ,
,![]() есть проекции радиуса-вектора на
координатные оси. Проекция – всегда
скалярная величина. Эти проекции
называются координатами материальной
точки М – x,
y,
z
. Отсюда
есть проекции радиуса-вектора на
координатные оси. Проекция – всегда
скалярная величина. Эти проекции
называются координатами материальной
точки М – x,
y,
z
. Отсюда
![]() ,
,![]() ,
,![]() .
.
Каждому
вектору может быть сопоставлен единичный
вектор (орт), имеющий то же направление,
что и сам вектор, но по модулю равный
единице. Пусть
![]() -
орты координатных осей соответственно.
Тогда можно записать
-
орты координатных осей соответственно.
Тогда можно записать![]() ,
,![]() ,
,![]() или
или![]() .
.
При
движении материальной точки ее координаты
и радиус-вектор изменяются с
течением времени. Поэтому в общем случае
можно записать:
![]() или
или![]() .
.
Это уравнение называется кинематическим уравнением движения материальной точки. Непрерывная кривая, которую описывает точка при своем движении относительно системы координат, называется траекторией.
1.2. Кинематические характеристики и уравнения поступательного движения. @
Кроме модели реального тела в виде материальной точки, в физике часто используется модель абсолютно твердого тела. Тело считается абсолютно твердым, если в условиях рассматриваемой задачи оно не деформируется, т.е. расстояние между любыми двумя произвольными точками сохраняется неизменным.
Движение материальной точки и твердого тела можно разложить на два вида движения - поступательное и вращательное. Любой другой вид движения есть их комбинация.
Поступательное
движение твердого тела
- это такое движение, при котором любая
прямая, ж
 Рис.2.1.
Пример поступательного движения
твердого тела.
Рис.2.1.
Пример поступательного движения
твердого тела.
Пусть за время
![]() материальная точка переместилась
из положения А в В по криволинейной
траектории (рис.3.1). Расстояние,
пройденное точкой вдоль траектории
за время
материальная точка переместилась
из положения А в В по криволинейной
траектории (рис.3.1). Расстояние,
пройденное точкой вдоль траектории
за время![]() есть скалярная, положительная
величина – путь
есть скалярная, положительная
величина – путь![]() .
.![]() - радиусы-векторы точек А и В.
- радиусы-векторы точек А и В.
Вектор,
соединяющий точки А и В, называется
вектором перемещения
Рис.3.1. Путь и
перемещение точки.![]() ,
,![]() . В общем случае модуль вектора перемещения
не равен пути (см. рис.3.1)
. В общем случае модуль вектора перемещения
не равен пути (см. рис.3.1)![]() . Лишь при прямолинейном движении
. Лишь при прямолинейном движении![]() . На малых временных интервалах, когда
. На малых временных интервалах, когда![]() ,
можно с большой точностью считать, что
,
можно с большой точностью считать, что![]()

Векторная
физическая величина, характеризующая
изменение радиус-вектора с течением
времени, называется скоростью.
Скорость характеризует изменение
![]() как по численному значению, так и по
направлению. Различают среднюю и
мгновенную скорости. Средняя скорость
как по численному значению, так и по
направлению. Различают среднюю и
мгновенную скорости. Средняя скорость![]() -
это скорость за данный промежуток
времени на данном участке траектории.
Она равна отношению вектора перемещения
-
это скорость за данный промежуток
времени на данном участке траектории.
Она равна отношению вектора перемещения![]() за время
за время![]() к этому промежутку времени
к этому промежутку времени![]() .
Мгновенная скорость
.
Мгновенная скорость![]() -
это скорость в данный момент времени,
в данном месте траектории. Она определяется
как предел, к которому стремится
-
это скорость в данный момент времени,
в данном месте траектории. Она определяется
как предел, к которому стремится![]() при
при![]() 0.
Отсюда следует
0.
Отсюда следует ![]() .
.
Математически,
вектор мгновенной скорости равен первой
производной от радиуса-вектора
по времени. Таким
образом
![]() .
Вектор
.
Вектор![]() направлен вдоль вектора
направлен вдоль вектора![]() ,
вектор
,
вектор![]() направлен по касательной к траектории
в данной точке.
направлен по касательной к траектории
в данной точке.
Векторная
физическая величина, характеризующая
изменение вектора скорости с течением
времени называется ускорением
![]() .
Различают среднее и мгновенное ускорения.
Среднее ускорение
.
Различают среднее и мгновенное ускорения.
Среднее ускорение
![]() равно отношению изменения вектора
скорости за времяt
к этому промежутку времени
равно отношению изменения вектора
скорости за времяt
к этому промежутку времени
![]() .
Мгновенное ускорение
.
Мгновенное ускорение![]() ,
т.е. ускорение в данный момент времени
находится как предел
,
т.е. ускорение в данный момент времени
находится как предел![]() приt
0.
Отсюда
приt
0.
Отсюда ![]() =
=![]() .
.
Вектор ускорения в данный момент времени определяется как первая производная от вектора скорости по времени или вторая производная от радиуса-вектора по времени.
 Рис.
4.1. Нормальное, тангенцальное и полное
ускорения.
Рис.
4.1. Нормальное, тангенцальное и полное
ускорения.![]() можно представить в виде суммы двух
слагаемых векторов
можно представить в виде суммы двух
слагаемых векторов![]() и
и![]() т.е.
т.е.![]() =
=![]() +
+![]() ,
где
,
где![]() -
изменение скорости по величине,
-
изменение скорости по величине,![]() -
изменение скорости по направлению
за промежуток времениt.
Поэтому вводят две составляющие
ускорения:
-
изменение скорости по направлению
за промежуток времениt.
Поэтому вводят две составляющие
ускорения:
![]() -
тангенциальное или касательное ускорение,
-
тангенциальное или касательное ускорение,![]() -
нормальное ускорение.Полное
ускорение
-
нормальное ускорение.Полное
ускорение
![]() , где
, где![]() -
характеризует изменение скорости только
по величине, а
-
характеризует изменение скорости только
по величине, а![]() -
характеризует изменение скорости
только по направлению.
На основании вышеизложенного можно
записать мгновенное ускорение
-
характеризует изменение скорости
только по направлению.
На основании вышеизложенного можно
записать мгновенное ускорение
![]() ,
,
![]()
Тангенциальное
ускорение
![]() численно равно первой производной от
скорости по времени и направлено по
касательной к траектории в данной точке.
Вот почему
численно равно первой производной от
скорости по времени и направлено по
касательной к траектории в данной точке.
Вот почему
![]() называется еще касательным ускорением.
называется еще касательным ускорением.
Учитывая,
что
![]() ,
можно геометрическими построениями и
расчетами получить
,
можно геометрическими построениями и
расчетами получить![]() .
Вектор
.
Вектор
![]() перпендикулярен
траектории в данной точке (направлен
по радиусу кривизны траектории к центру),
отсюда его название – центростремительное
ускорение. Полное ускорение численно
равно
перпендикулярен
траектории в данной точке (направлен
по радиусу кривизны траектории к центру),
отсюда его название – центростремительное
ускорение. Полное ускорение численно
равно
![]() .
.
Вектор
![]() является диагональю прямоугольника со
сторонами
является диагональю прямоугольника со
сторонами
![]() и
и
![]() (рис.4.1).
(рис.4.1).