

Ответы_на_билеты_редактированные
.pdf55. Кинематические и энергетические характеристики червячной передачи. Кинематические параметры: i - передаточное отношение;
V1 =ω1 dw / 2
i = n1  n2 = Z2
n2 = Z2  Z1 ;
Z1 ;
VCK =V1  cosγ;
cosγ;
VCK >V1
Энергетические параметры: η = Р2  Р1 = 0,95(tgγ
Р1 = 0,95(tgγ  tg(γ +ϕ ')) , где γ – угол подъема винтовой линии;
tg(γ +ϕ ')) , где γ – угол подъема винтовой линии;
ηЧЕРВ = tgγ  tg(γ +ϕ '); ϕ '−приведен.коэф.трения. Пути повышения КПД: увелич. угол подъема; увелич. Z1 и уменьш. q ; уменьшить трение.
tg(γ +ϕ '); ϕ '−приведен.коэф.трения. Пути повышения КПД: увелич. угол подъема; увелич. Z1 и уменьш. q ; уменьшить трение.
51

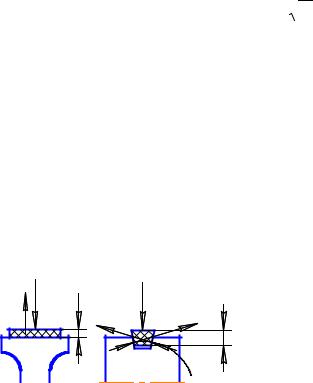
56. Опред-е величины и направления действия составляющей норм. силы, действующей в червячном зацеплении.
F |
= F |
= 2T |
d |
; F |
= F |
= 2T |
d |
2 |
; F |
= F |
= F |
tgα |
(*) |
– |
t1 |
a2 |
1 |
W1 |
t 2 |
a1 |
2 |
|
r1 |
r 2 |
t 2 |
|
|
|
справедливо только для архимедова червяка. T2 =T1 u η
Нормальная сила Fn = 
 Ft2 + Fr2 + Fa2
Ft2 + Fr2 + Fa2
52
57. Виды разрушения зубьев и критерии работоспособности червячной передачи. Мат-лы червяка и черв. колеса. Виды разрушений:
1 усталостное выкрашивание
2 заедание
3 изнашивание Критерии работоспособности:
1.Проектный расчет: σH ≤ [σH ]. Доп. напряжение берется экспериментально.
2.Проверочный расчет (на усталостную поломку зуба): σF 2 ≤ [σF ]2
Материалы деталей передачи: Червяк: сталь 40Х + ТВЧ HRC 50-54
18ХГТ + цементация HRC 60-62 Колеса: бронза (много олова (10%)) (оловянные, алюминиево-железистые), чугун
53
58. Сравнительная хар-ка глобоидных и червяных передач.
Глобоидные передачи: витки червяка образуются на глобоиде. Нагрузочная способность в 1,5 раза больше, чем у обыкн. червячных, т.к. больше зубьев нах. в зацеплении. Линии контакта расположены почти перпендикулярно направлению скоростей скольжения, => образуется непрерывная масляная пленка на трущихся поверхностях, устранение заедания, можно повысить контактные напряжения.
Недостатки: сложность изготовления и монтажа; очень чувствительны к износу подшипников и деф-ям.
54
59. Основные виды и область применения ременных передач. Классификация:
1.По форме сечения ремня: плоский; клиновой; поликлиновой; круглый; зубчатый.
2.По способу натяжения ремня: периодическая регулировка натяжения; с помощью грузов и пружин; автоматическая регулировка с помощью реактивного момента и спец. устройств.
Достоинства:
1.Возможность передачи движения на большие расстояния
2.Простота конструкции
3.Низкая стоимость
4.Высокая плавность
5.Выполняет роль предохранительного элемента при перегрузках
Недостатки:
1.Большие габаритные размеры
2.Большие нагрузки на валу (в 2 раза больше, чем в цилиндрич. и зубчатых передачах)
3.Низкая долговечность
4.Зависимость передаточного отношения от нагрузки (непостоянство передаточного отношения)
5.Вытяжка ремней при работе
Применяют в основном там, где по условиям конструкции валы расположены на значительных расстояниях. Наиб. Распространение имеют клиновые ремни; плоские ремни применяют в высокоскоростных передачах; круглые ремни – для малых мощностей (в приборах, машинах домашнего обихода).
55

60. Определение сил, действующих на ремень и шкивы ременной передачи. Применение ф-лы Эйлера.
|
тонкая невесомая нить |
Рассмотрим цилиндр. α – угол обхвата. Дано: F1 > F2 , f |
|
|||||||
|
y |
|
|
|
∑X : |
|
|
|||
|
|
F |
|
|
|
|
|
|||
|
|
|
|
|
|
− dFn |
+ F sin(dα 2)+ (F + dF)sin(dα 2)= 0 |
|||
|
2 |
dF |
F |
|
|
|||||
|
d |
|
d |
∑Y : |
|
|
|
|||
|
|
|
|
|
+ F cos(dα 2)−(F + dF)cos(dα 2)= 0 |
|||||
|
|
dF |
|
|
|
x |
− dF |
|||
|
|
n |
|
|
|
тр |
|
|
||
|
|
|
|
|
|
|
Т.к. dα –>0: |
|
|
|
|
|
|
|
|
|
|
− dFn + F dα |
2 + F dα 2 = 0 − dFn = Fdα |
||
|
|
|
|
dF+F |
|
|
|
|
0 |
|
|
F |
|
|
|
|
dFn f − dF = |
dF = dFn f |
|||
|
|
|
|
F1 |
α |
|
|
|
|
|
|
1 |
|
dF = Ffdα; |
∫dF F = ∫ fdα; lnF FF12 = fα; ln F1 −ln F2 |
= fα; F1 F2 = e fα |
|||||
|
V |
|
||||||||
|
|
|
|
F 2 |
0 |
|
|
|
|
|
формулы Эйлера Выводы:
1.Ремни надо делать из мат-ла, кот. обладает наиб. коэф. трения.
2.Наиб. тяговая способность – при передаточном отношении около 1.
Влияние центробежных сил на тяговую способность ременной передачи.
V
dFV
dFЦБ


|
|
y |
|
2 |
|
|
||
/ |
|
|
|
|
|
|
|
|
|
||
d |
|
|
FЦ.Б. = mV 2  R , A = bδ
R , A = bδ
dFЦ.Б. = 2dFV sin(dα 2); dFЦ.Б. = dFV dα;
2); dFЦ.Б. = dFV dα;
|
|
α / 2 |
x |
dFЦ.Б. = bδ d 2 dαρV 2 d / 2 = АρV 2 dα; FV = ∫dFV ; FV = AρV 2 |
|
|
0 |
|
|
1. Межосевое расстояние а=Const. |
|
|
FХХ = F ′+ FV |
= F0 ; Q′ = 2F0 − 2FV ; χ = 0,1...0,3; Q′ < Q; ремень распух. 2. |
|
Q=Const. |
|
|
|
dF |
|
|
FХХ = F0 + FV ; χ =1; FXX = F0 + χFV |
|
|
|
|||
3. V=0, T2<>0 |
V |
|
|
|
|
|
|||||
|
F1 > F2 . Условие равновесия: |
∑T = 0 |
|
|
|
|
|||||
|
|
F2 |
|
|
|
|
|||||
T |
|
T1 + F2 d1 2 − F1 d1 |
2; F1 − F2 |
= 2T1 d1 = Ft |
- окружная сила (1) |
||||||
1 |
|
|
Если жесткость ремня C = dF dδ = Const , то: 2F0 |
= F1 + F2 |
|
||||||
|
d |
|
(2) – зав-ть Понселе. |
||||||||
|
|
F1 |
F1 = F0 + Ft |
2; F2 = F0 − Ft |
2 |
|
|
|
|
||
|
|
4. V<>0, T2<>0. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
(F − F ) |
= e fα (•) . Подставим ( )в (•): |
||||
F = F + F |
2 + χF ; F = F − F 2 + χF ( ) Ф-ла Эйлера:(F − F ) |
||||||||||
1 0 |
t |
|
V |
2 0 |
t |
V |
1 |
V |
2 |
V |
|
Ft max = 2[F0 −(1− χ)FV ](e fα −1) (e fα +1). Получили max окружную силу, действ. в передаче.
(e fα +1). Получили max окружную силу, действ. в передаче.
56

61. Упругое скольжение ремня
|
|
m |
|
V |
2 |
|
|
|
|
2 |
|
T |
|
l |
1 |
|
|
|
|
2 |
|
l |
d |
1 |
|
|
V |
m |
1 |
|
|
1 |
в ременной передаче. Определение передаточного отношения. |
|
|
||||
F |
|
2 |
вида скольжения ремня по шкиву: |
упругое |
скольжение |
и |
|
буксование. Упругое скольжение наблюдается при любой нагрузке |
|||||
2 |
|
|||||
|
|
передачи, а буксование – только при перегрузке. |
|
|
||
F >F |
1 = 0 + ∆ 1; 2 = 0 + ∆ 2 ; ∆ 1 > ∆ 2 |
|
|
|
||
1 |
2 |
0 |
- первоначальная длина участка ремня. |
|
|
|
m =m |
|
|
|
|||
1 |
2 |
V1 = ( 0 + ∆ 1 ) ∆t ; V2 = ( 0 + ∆ 2 ) ∆t V1 >V2 |
|
|
||
|
|
|
|
|||
|
|
i12 = ω1 ω2 =V1d2 / 2 V2 d1 / 2 |
|
|
|
|
F |
|
Коэф. скольжения: ε = (V1 −V2 ) V1 . Если |
Т2=0, то |
ε=0; Если |
Т2 |
|
1 |
|
велико, наблюдается буксование: V2=0, ε=1. |
|
|
|
|
εV1 =V1 −V2 ; V2 =V1 (1−ε); i12 =V1d2  V1 (1−ε)d1 = d2
V1 (1−ε)d1 = d2  d1 (1−ε)
d1 (1−ε)
57

62. Использование кривых скольжения для оценки тяговой способности ременных передач.
% |
|
|
φ – коэф. тяги. ϕ = (F1 − F2 ) (F1 + F2 )≈ Ft 2F0 (без учета FЦ.Б. ) |
|
|
|
I – зона упругого скольжения |
|
|
|
II – зона частичного буксования |
|
|
III – зона буксования |
|
|
|
|
Если F2 ↑ ϕ ↑. При ε ↑ увеличивается износ передач. |
|
|
|
Испытания проводят для эталонных передач: |
|
I |
|
d1 = d2 = d0 ; V0 ; автоматическая регулировка; спокойная нагрузка. |
до 3-4 |
II |
III |
ϕ0 −критический коэф. тяги. |
|
Радиальную нагрузку следует выбирать вблизи ϕ0 слева, там и max η |
||
|
|
|
|
0 |
[ ] |
|
|
|
пред. |
|
58

63. Напряжения в ремне, возник. при работе передачи. Виды разрушений и критерии работоспособности. Напряжения в ремне:
Силы: F0 , F1 , F2 , FV , Ft ; σ0 = F0 A; ; σ1 |
=σ0 |
+σT 2 + χσV ; σ2 =σ0 −σT 2 + χσV , где σ1 |
- напряжение для |
||||||
ведущей ветви ремня; σ2 - напряжение для ведомой ветви ремня. |
|
|
|
|
|||||
Напряжения изгиба в ремне: |
′′ |
′′ |
=1 ρ =1 (d / 2 |
+δ / 2). Пусть δ << d y |
′′ |
= |
2 d |
||
|
|
|
|||||||
|
|
σИ = М W ; M = EIy ; y |
|
|
|||||
|
W = 2I δ ; σИ = E2Iδ 2dI = Eδ d . Пусть d1 > d2 σИ1 >σИ2 |
|
|
|
|||||
|
d |
|
|
|
|||||
|
σИ1 ≈ (0,6...0,7)σmax |
; σmax |
=σ1 +σИ1 . В |
ременной передаче напряжение переменно по |
|||||
|
|
||||||||
величине.
Виды разрушений:










 1. Вытяжка. При использовании нескольких ремней при выходе из строя 1 из них меняют весь комплект, т.к. они все вытягиваются по-разному => повышенный износ.
1. Вытяжка. При использовании нескольких ремней при выходе из строя 1 из них меняют весь комплект, т.к. они все вытягиваются по-разному => повышенный износ.
2.Трещины в резиновой основе и отслоение корда от резиновой основы.
3.Износ и срыв оберточной прорезиненной ткани.
Критерии работоспособности:
1.Тяговая способность (опред. силой трения между ремнем и шкивом)
2.Долговечность ремня (в условиях норм. эксплуатации огранич-ся разрушением ремня от усталости)
59
64. Расчет клиноременных передач. Сравнительная хар-ка плоскоременных и клиноременных передач. Методика расчета клиноременных передач:
1.Выбор типоразмера ремня (определяется нагрузкой)
2.Опред. диаметр меньшего шкива: d1 = Kd 3 T1 ≥ dmin . Kd - учит. тип ремня.
T1 ≥ dmin . Kd - учит. тип ремня.
3.Опред. диаметр ведомого шкива: d2 = d1i12 . d2 и d1 - округлить до стандартных значений
4.Межосевое расстояние: amin ≤ a ≤ amax ; amin = (d1 + d2 ) 2 + h; amax = 2(d1 + d2 )
2 + h; amax = 2(d1 + d2 )
5.Длина ремня: = f (a, d1 , d2 )
6.Уточнить a = f ( , d1 , d2 )
7.α1; Ft ; частота пробега U =V = [1
= [1 c]≤15
c]≤15
8.Ресурс работы ремней назначают. Он зависит от коэф. перегрузки.
9.Опред. мощность: [P0 ] - доп. мощность по таблице или графику; [P0 ]= f (d1 ,V )
10.Доп. мощность для нашей передачи: [P]= [P0 ]CPCα C CU
11.Опред. кол-во ремней: Z ≥ P [P]CZ . CZ - учит. кол-во ремней.
[P]CZ . CZ - учит. кол-во ремней.
12.Опред. массу комплекта ремней: m = A ρZ
Сравнительная хар-ка.
1) |
Q |
F |
|
n |
|
2)Q
Fn Fn
h |
|
|
1) Fn = Q; Fтр = fFn = fQ Более высокая плавность, малая δ; до 100м/с. 2) Q = 2Fn sin(ϕ 2); Fтр = 2 fQ(1
2); Fтр = 2 fQ(1 2sin (ϕ
2sin (ϕ 2)) Меньшая плавность,
2)) Меньшая плавность,
большая тяговая способность, можно получить большее передаточное отношение (до 4); до 30 м/с.
60