

Контактные сети и ЛЭП
.pdfуменьшить габариты основания токоприемника и его металлоемкость. Однако при этом появляется повышенная нагрузка на подшипники средних шарниров. К таким полупантографам относятся токоприемники типа П-7, Л-13У, Л-14М и др.
Асимметричные полупантографы нашли широкое применение за рубежом. По сравнению с симметричными, они обладают меньшей массой и габаритами. Такие токоприемники активно внедряет французская фирма «Faiveley». В России разрабо-
таны токоприемники такого типа ПН-2 для электровоза ВЛ-41, Тас-11 для ЭП-200,
ТП-250 для поезда «Сокол» и СВАРЗ — для трамвая (рис. 12.3, д). Они эффективны в случае применения высокопрочных материалов и точной технологии.
Рис. 12.3. Основные схемы систем подвижных рам токоприемников: ромбические {а. б) и Х- образные (в) пантографы; симметричные (г) и асимметричные (д) полупантографы: с подвижным основанием (с) и штанговые с тросовой или цепной передачей {ж)
Штанговые рамы токоприемников применяют для троллейбусов, трамваев,
метрополитена. Они вновь привлекли к себе внимание в связи со стремлением сни-
зить приведенную массу токоприемника, сделать его малошумным, а рамы — ста-
тически определимыми. К недостаткам трамвайной штанги (бугеля) относится по-
ворот контактной вставки вокруг своей оси при изменении высоты подъема. Более рациональным является вариант с цепной или тросовой передачей (рис. 12.3, ж),
применяемый для штанговых токоприемников, разработанных в ОмГУПСе (ТС-ЗМ, 5М70). Они представляют собой статически определимую конструкцию, не бо-
ящуюся перекосов, с минимальными трением и массой.
Токоприемники с подвижным основанием (рис. 12.3, е) возникли в связи со стремлением снизить приведенную массу так, чтобы обеспечить работу при скоро-
стях свыше 55 м/с (200 км/ч). Высота подвижного основания поддерживается спе-
циальным авторегулирующим устройством, срабатывающим, например, перед вхо-
дом в тоннель со сниженными контактными проводами.
Параметры системы подвижных рам входят переменными составляющими
(зависящими от высоты подъема рам) в целый ряд характеристик токоприемника,
регламентируемых стандартом и техническим условиями. К ним относятся: приве-
денная масса токоприемника, характеристики опускающей и удерживающей сил,
аэродинамическая подъемная сила, частотная характеристика токоприемника, а
также весовая характеристика и характеристика весового момента, необходимые для расчета токоприемника. Конструкция системы подвижных рам полностью опреде-
ляет поперечную жесткость токоприемника.
Под приведенной массой токоприемника принято понимать воображаемую мас-
су, движущуюся вертикально со скоростью точки приведения (точки контакта) и
обладающую такой же кинетической энергией, как и весь токоприемник. Это поня-
тие применимо без оговорок только к токоприемникам с одной степенью свободы.
Во всех остальных случаях каретки, или другие рессорные элементы, должны быть условно заклинены.
От приведенной массы токоприемника зависит качество токосъема при высо-
ких скоростях движения и износ контактирующих элементов. Она определяется как сумма масс полозов тл, деталей верхнего узла с каретками тк и приведенной массы системы подвижных рам тр :

тТ = mл +mк + тр. |
(12.1) |
При этом массы mк и тл — величины постоянные, не зависящие от высоты подъема токоприемника.
В соответствии с требованиями ГОСТ масса токоприемника должна быть не более 45 кг для конструкций типа Т и 33 кг — типа Л. У токоприемников, предна-
значенных для работы на ЭПС с максимальными скоростями до 120 км/ч, допус-
кается увеличение приведенной массы до 55 кг.
Экспериментально приведенная масса может быть определена по периоду ма-
лых свободных колебаний. Для этого систему подвижных рам подвешивают за верхний шарнир к неподвижному элементу посредством пружины с известной жесткостью ж (рис. 12.4, а). Подъемный и опускающий механизмы при этом долж-
ны быть отключены, а каретки заклинены. Приведенную массу рассчитывают по из-
вестной из механики формуле, предварительно измерив период свободных колеба-
ний Т.
(12.2)
Массу полоза, а следовательно, и динамические свойства токоприемников,
определяют, в основном, контактирующие элементы i вставки или накладки). Для оценки их динамических свойств фирма Morganite использует величину погонной массы (кг/м) неизношенной вставки. Этот показатель позволяет оценить только ди-
намические свойства контактных материалов и никак не связан с их нагрузочной способностью.
Материал вставки должен обеспечивать надежный съем максимального тока при минимальной собственной массе с достаточно высоким динамическим коэффи-
циентом использования КИ, представляющим частное от деления длительного тока,
снимаемого одной вставкой, на ее погонную массу. В настоящее время, не имея данных о динамических коэффициентах материалов вставок, конструкторы токо-
приемников разрабатывают полозы без необходимых расчетов, используя данные фирм их изготовляющих, которые иногда носят рекламный характер.

Так как масса кареток незначительна, а масса полозов определяется, в основ-
ном, массой контактных накладок, количество которых зависит от снимаемых то-
ков, то уменьшения массы полозов можно добиться только за счет облегчения каркаса полоза и рогов. Поэтому для улучшения динамических качеств токопри-
емника необходимо уменьшать приведенную массу системы подвижных рам.
Весовая характеристика токоприемника представляет собой зависимость сил тяжести (веса) его подвижных частей, приведенных к верхнему шарниру, от высоты его подъема. Она определяется как сумма сил тяжести полозов GП деталей верхнего
узла с каретками GK и системы подвижных рам Gp: |
|
GT = GП + GK + Gp. |
(12.3) |
От высоты подъема зависит только приведенная сила тяжести системы по-
движных рам токоприемника G .
Весовая характеристика токоприемника необходима при расчете опускающей и
удерживающей характеристик, а также для определения весового момента, исполь-
зуемого при расчете характеристики статического нажатия. Кроме того, она позво-
ляет приближенно определять приведенную массу токоприемника.
Экспериментальное определение весовой характеристики производится дина-
мометром (рис. 12.4, б) при снятых подъемных пружинах и отключенном приводе путем медленного перемещения токоприемника вверх GT1j и вниз GT2j;в диапазоне рабочих высот. Тогда GTj = (GTlj +GT2j )/2. Таким образом исключается сила трения в шарнирах.
Поперечная жесткость токоприемника жТ представляет собой отношение го-
ризонтальной силы Р, приложенной к верхнему шарниру в направлении, перпенди-
кулярном оси пути, к вызванному этой силой перемещению верхнего шарнира f в
направлении действия силы:
(12.4)
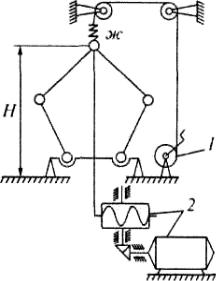
Рис. 12.4. Кинематические схемы для определения приведенной массы (а) и весовой характери-
стики токоприемника (о); 1 — лебедка; 2 — самописец; 3 — |
динамометр |
Согласно требованиям ГОСТ 12058—72 |
поперечная жесткость токоп- |
риемника должна быть не менее 17 Н/мм. Экспериментально поперечную жест-
кость токоприемника определяют в его верхнем рабочем положении путем при-
ложения к верхнему шарниру системы подвижных рам боковой горизонтальной силы равной 500 Н. Горизонтальное смещение верхнего шарнира под действием этой силы определяется с помощью отвеса и линейки, закрепленной на основании токоприемника.
Поперечная жесткость токоприемника является характеристикой, га-
рантирующей надежный токосъем при прохождении воздушных стрелок, при сходе провода на рог полоза, а также при поперечных колебаниях подвижного состава, т.е.
в тех случаях, когда на токоприемник действуют силы, направленные в плоскости,
перпендикулярной оси пути.
Частотная характеристика представляет собой зависимость длительности нарушения контакта между полозом и колеблющимся в вертикальной плоскости контактным проводом или имитирующим его устройством от частоты гармониче-
ских колебаний последнего при определенной амплитуде. Эта проверка предназна-
чена для комплексной оценки состояния узлов токоприемника (кареток, системы
подвижных рам, демпферов и т.д.). Она производится опытным путем для всего то-
коприемника в целом.
Динамические качества токоприемника считаются удовлетворительными, ес-
ли отсутствуют отрывы полоза от контактного провода, колеблющегося с ампли-
тудой 40±2 мм и частотой 0,8 Гц.
12.3. Силы нажатий и сухого трения системы подвижных рам токоприемников
Безаварийная работа ЭПС и контактной сети в значительной степени зависит от характеристик, определяемых конструкцией подъемно-опускающего механизма
(привода) токоприемника. Привод должен обеспечивать: необходимую величину опускающей силы, требующейся для надежного опускания токоприемника (при необходимости) с заданной скоростью за определенное время; определенную вели-
чину удерживающей силы, предотвращающей самопроизвольный подъем токопри-
емника при высоких скоростях движения; заданное статическое нажатие на кон-
тактный провод с возможностью его регулирования как вручную, так и автоматиче-
ски; достаточно малое время подъема и опускания токоприемника без повреждения его элементов и контактной сети при заданных эксплуатационных скоростях движе-
ния подвижного состава. Кроме того, привод токоприемника должен управляться дистанционно.
По виду используемой энергии все приводы токоприемников разделяют на пневматические, электрические и гидравлические (рис. 12.5).
Заслуживает внимания также конструкция подъемно-опускающих механизмов с резинокордными упругими элементами (РКЭ), впервые предложенными в ОмГУПСе. Они позволяют значительно снизить металлоемкость привода за счет ис-
ключения пневмоцилиндров, подъемных и опускающих пружин, уменьшить трудо-
затраты на эксплуатацию токоприемника. Кроме этого, применение РКЭ в приводах позволяет регулировать статическое нажатие токоприемника на контактный провод как по команде машиниста, так и автоматически, в зависимости от скорости движе-

ния локомотива, наличия гололеда, ветра и других факторов, что достигается про-
стым изменением давления сжатого воздуха в РКЭ.
Конструкция подъемно-опускающего механизма определяет характеристику статического нажатия рам, время подъема и опускания токоприемника, а также опускающую и удерживающую характеристики.
Характеристика статического нажатия рам токоприемника представляет со-
бой зависимость вертикальной силы, с которой полоз давит на контактный провод,
от высоты подъема токоприемника Рр(Н). При этом стандартом регламентируется как значение силы нажатия в диапазоне рабочих высот токоприемника и разница между наибольшим и наименьшим нажатиями, так и двойная величина сухого тре-
ния в шарнирах. Сила сухого трения в механизме токоприемника, приведенная к верхнему шарниру, определяется как полуразность пассивного нажатия Р2р (изме-
ренного при движении токоприемника вниз) и активного Р1р (измеренного при дви-
жении вверх)
(12.5)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пружинно-пневматические |
|
|
|
|
Весо-пневморессорные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Пружинно- |
весопневматические |
|
|
Пневматические |
|
|
Сильфонные |
|
С передачей усилия |
отпускания на главный |
вал |
|
С приложением усилия |
опускания к верхнему |
шарниру |
|
|
С освобождением |
опускающей пружины |
|
|
Опускание реверсом |
электродвигателя |
|
|
Опускание за счет силы |
тяжести |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 12.5. Классификация подъемно-опускающих механизмов токоприемников
Значение этой силы должно быть минимальным для получения лучших дина-
мических свойств токоприемника.
Статическое нажатие является одной из составляющих контактного нажатия токоприемника на контактный провод Ркт, которое, в свою очередь, определяет из-
нос контактирующих элементов. Поэтому характеристика статического нажатия должна быть постоянной во всем диапазоне рабочих высот токоприемника. По ГОСТ 12058—72 статическое нажатие токоприемника на контактный провод в диа-
пазоне рабочих высот должно быть: активное для аппаратов типа Т не менее 100 и
типа Л 60 Н; пассивное — 130 и 90 Н соответственно. Конструкция токоприемника типа Л должна обеспечивать возможность увеличения нажатия на 30 %. Разница между наибольшим и наименьшим нажатиями при одностороннем движении ΔРр должна быть не более 10 Н для токоприемников типа Л и 15 Н для Т. Двойная вели-
чина трения в шарнирах, приведенная к контактной поверхности полоза 2 Wp, не может превышать 20 Н для легких и 25 Н для тяжелых токоприемников.
Определение характеристики статического нажатия производится эксперимен-
тально (рис. 12.6, а), для чего в цилиндр привода подается воздух (или опускающая пружина выводится из работы другим способом). При этом показания динамометра снимаются (при плавном движении вверх и вниз) устройствами, автоматически опускающими и поднимающими токоприемник.
Опускающая характеристика представляет собой зависимость силы, действу-
ющей на опускание системы подвижных рам токоприемника, от его высоты Р0П(Н).
Аналогично, удерживающая характеристика — это зависимость силы, противо-
действующей подъему системы подвижных рам токоприемника, от его высоты
Рул(Н). Они необходимы для работы в переходных режимах.
Согласно требованиям ГОСТ 12058—72 опускающая сила в диапазоне рабочих высот должна быть не менее 200 Н у токоприемников типа Т и 120 Н у типа Л. Не-
работающий токоприемник должен надежно удерживаться в опущенном положении при движении ЭПС со скоростью 160 км/ч (скорость обдува 44,5 м/с).
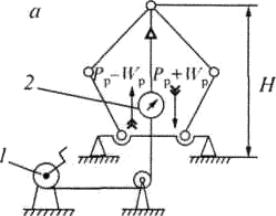
Рис. 12.6. Кинематические схемы для определения характеристики статического нажатия (а); характеристик опускающей и удерживающих сил (б); 1 — лебедка; 2 — динамометр
Экспериментальное определение удерживающей и опускающей характеристик производят следующим образом (рис. 12.6, б). При выпущенном из цилиндра при-
вода воздухе токоприемник следует медленно поднимать вверх (за динамометр),
снимая показания удерживающей силы. Опускающая сила определяется подобным образом при движении вниз.
12.4. Силы нажатий кареток токоприемников
Каретка (см. рис. 12.2, а, б, в, д) — элемент конструкции токоприемника, обес-
печивающий упругое перемещение полоза относительно верхнего шарнира системы подвижных рам. Каретка предназначена для уменьшения влияния инерции рам (в
процессе взаимодействия с контактной сетью) путем упругого расчленения масс то-
коприемника. Она позволяет безотрывно проходить небольшие неровности на кон-
тактных проводах, а при определенных параметрах выбирать и стрелы провеса кон-
тактной подвески.
Многообразие конструкций кареток позволяет их классифицировать (рис. 12.7) по способу установки упругих элементов между полозами и верхним шар-
ниром системы подвижных рам токоприемника: плунжерные вертикальные;
плунжерные наклоняемые; плунжерно-рычажные; плунжерные с демпфировани-
ем; рычажные; рычажно-пружинные; пружинные; с кулисой (направляющей).
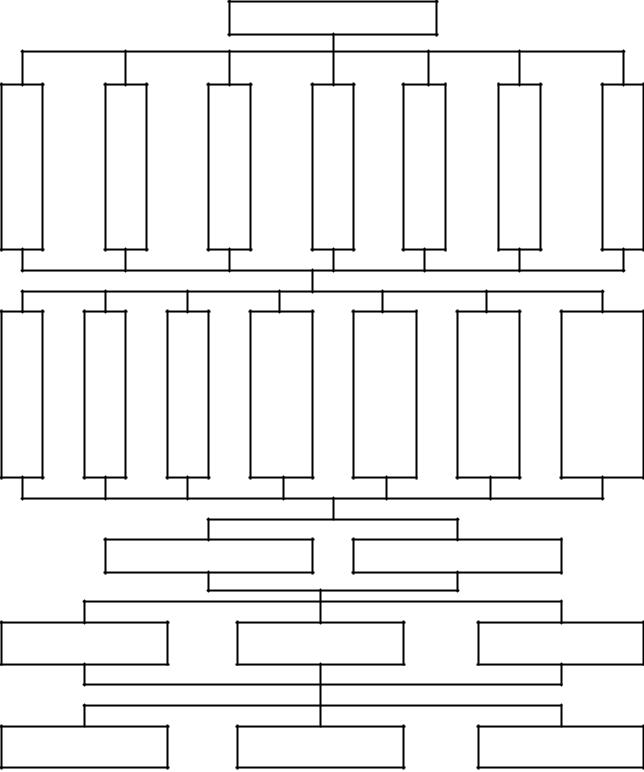
Рис. 12.7. Классификация кареток токоприемников
По типу и качеству применяемых упругих элементов каретки бывают: с цилин-
дрическими пружинами, работающими на сжатие, растяжение, закручивание; плос-
кими пружинами; резиновыми упругими элементами; пневматическими упругими