

Контактные сети и ЛЭП
.pdfго провода.
Рис. 11.8. Схема приложения нагрузок к проводам цепной подвески, отклоненной ветром
В зависимости от конструктивной высоты цепной подвески h величина С опре-
деляется выражением
(11.19)
Величину горизонтального отклонения несущего троса b’T под действием рав-
номерно распределенной нагрузки р', приложенной на среднем участке пролета длиной l/2 (рис. 11.9), определим из выражения
(11.20)
Обозначим через рэ величину эквивалентной удельной нагрузки, передающейся с контактного провода на несущий трос, распределенной равномерно по длине всего пролета l и вызывающей ту же стрелу провеса b” T.
Тогда
откуда
(11.21)
Значения полного горизонтального отклонения несущего троса b’T и контакт-
ного провода bк в середине пролета могут быть определены при этом по формулам
Рис. 11.9. Расчетная схема расположения нагрузок при ветровом расчете цепной подвески
(11.22)
(11.23)
Направление нагрузки рэ принято здесь таким же, как это показано рис. 11.8 для р'. В тех случаях, когда несущий трос получает большие смещения, чем контактный провод, нагрузка рэ будет иметь отрицательное значение.
Величина полного ветрового отклонения несущего троса в середине пролета
(рис. 11.10) исчисляется как сумма горизонтальной стрелы провеса bТ, полученной тросом под действием ветра, ветрового отклонения подвесных гирлянд β и прогиба опор γт (на уровне крепления гирлянд) под действием ветровой нагрузки на провода и тросы.
Величина полного ветрового отклонения контактного провода рассчитывается как сумма горизонтальной стрелы провеса контактного провода bк и прогиба опоры γк на уровне контактного провода под действием ветровой нагрузки на провода и

тросы.
Для схемы, представленной на рис. 11.10, можно написать
b/к + γк – b /т – β – γт =е. |
(11.24) |
Подставим в полученное уравнение вместо величин b/к, b/т и e их значения из вы-
ражений (11.23), (11.22), (11.17) и заменим величину β ее значением по формуле
β = λρТ , |
(11.25) |
qТ |
|
где λ — длина подвесной гирлянды; qт — результирующая нагрузка несущего троса, определяемая по формуле
qТ = 
 (gT + g K ) 2 + pT2 ,
(gT + g K ) 2 + pT2 ,
где g T+ gK — вертикальная нагрузка от веса проводов цепной подвески.
Рис. 11.10. Схема расположения проводов цепной подвески при отклонении ее ветром
При определении значений qT и β по формуле (11.25) для упрощения расчета не учитываются изменения нагрузки вследствие перераспределения нагрузок между несущим тросом и контактным проводом. Как показали сравнительные расчеты, та-

кое допущение не отражается сколько-нибудь существенно на точности получаемых результатов при определении значения рэ.
После подстановки в уравнение (11.24) указанных значений и замены р' в вы-
ражении (11.17) его значением из выражения (11.21) получим
Умножив обе части уравнения на 8КТ/l2 и перенеся члены, содержащие рэ в
правую часть уравнения, получим
откуда
(11.26)
После того как найдено значение рэ легко может быть определена величина полного ветрового отклонения контактного провода.
При вертикальной цепной подвеске с расположением контактного провода по оси пути наибольшее отклонение провода в середине пролета определяется по фор-
муле
При расположении контактной подвески с зигзагом а (на прямом участке)
наибольшее отклонение контактного провода от оси пути определяется по формуле
(11.27)
ЭТО отклонение имеет место в точке, отстоящей от середины пролета на рас-

стоянии
Величину наибольшего допускаемого пролета можно получить из формулы
(11.28)
Соответствующие формулы для кривых участков получат вид:
(11.29)
(11.30)
При желании учесть в расчете лишь часть действующих факторов и пренебречь влиянием остальных соответствующие формулы для определения значений рэ и bк
легко могут быть получены из выражений (11.26) и (11.27), если принять в них ве-
личины γк, λ, а равными нулю.
Так как в выражение (11.27) для определения значения рэ входит величина l,
при решении уравнений (11.28) и (11.30) приходится прибегать к методу последова-
тельных приближений. Для этого, задавшись значением l, найденным, например, по формулам (11.28) или (11.30) для случая, когда рэ = 0, определяют для этого значе-
ния l величину рэ по формуле (11.26). Подставив найденную величину рэ в вы-
ражение (11.28) или (11.30), находят новые значения l, для которых вновь могут быть определены соответствующие им значения рэ.
Можно также, задаваясь величиной l и определяя соответствующие значения рэ,
находить по формулам (11.27) и (11.29) значения bКдоп, которые должны получаться равными 0,5 м или незначительно отличаться в меньшую сторону.
Значение натяжения несущего троса Т в выражении (11.26) следует брать при температуре и нагрузке для режима наибольшей ветровой нагрузки.
Если определение допустимых длин пролетов производится до выполнения ме-
ханических расчетов цепной подвески, величину Т в выражении (11.26) можно при-
нимать равной 0,65 Тmах для медного несущего троса и 0,75 Тmах — для стального или биметаллического (сталемедного).
Величину То, входящую в формулу (11.19) для определения средней длины струны, принимают при медном несущем тросе равной 0,75 Тmах, при стальном или биметаллическом (сталемедном) 0,8 Тmах.
Зигзаг контактных проводов на прямых участках принимается равным ± 0,3 м,
наибольший вынос у опор на кривых участках 0,4 м.
Длину подвесной гирлянды К можно принимать для контактной подвески по-
стоянного тока равной 0,5 м при двух изоляторах в гирлянде, а для переменного то-
ка 0,7 м при трех изоляторах в гирлянде и 0,85 м при четырех. В случае применения малогабаритных подвесных изоляторов эти данные соответственно уменьшаются.
Величины дополнительного прогиба опор под действием ветровой нагрузки γт и γк должны определяться с учетом давления ветра как на провода цепной подвески,
так и на усиливающие и другие провода, подвешенные на данных опорах.
При наличии только проводов контактной цепной подвески величины γк и γт,
для однопутных консольных современных железобетонных опор можно принимать для скорости ветра 30 м/сек равными γк =0,015 и γт = 0,022 м.
ГЛАВА 12
ТОКОПРИЕМНИКИ 12.1.Общие сведения и определения
Токоприемники (энергополучатели) – аппараты ЭПС, предназначенные для приема электроэнергии от контактных проводов (токопроводов). Они могут быть контактными, квазиконтактными, бесконтактными. Конструкция токоприемников и их характеристики определяются мощностью и скоростью ЭПС, габаритами по-
движного состава и приближения строений, расположением контактных проводов в плане и по высоте. Токоприемники должны обеспечивать надежный (без по-
вреждений), экономичный (с минимальным износом контактирующих элементов) и
экологичный токосъем. По величине токовой нагрузки их делят на два типа: тяже-
лый (Т) и легкий (Л). Комплексы конструктивных элементов, входящих в состав контактных токоприемников, подразделяют на базовые, альтернативные и дополни-
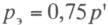
тельные (рис. 12.1).
В базовый комплекс входят элементы, необходимые для участков, электрифи-
цированных как на постоянном, так и на переменном токе: система подвижных рам;
подъемно-опускающий механизм (привод); основание и управляющие системы.
К альтернативным относят специфические элементы для постоянного или пе-
ременного тока, а также для электровозов или электропоездов: каретки; полозы;
контактирующие, токопроводящие и изолирующие элементы. Комплексы базовых и альтернативных элементов содержат все токоприемники отечественного ЭПС.
Дополнительные элементы используют для повышения эксплуатационных свойств токоприемников: скорости, надежности, экономичности и экологичности.
На российских железных дорогах применяют токоприемники тяжелого и легкого типа магистрального ЭПС (рис. 12.2, а, б): а — пантограф (токоприемник тяжелого типа Т-5); б — симметричный полупантограф (токоприемник легкого типа Л-1 ЗУ,
Л-14М). Для повышенных скоростей движения используют специальные токопри-
емники: токоприемник ВНИИЖТ Сп-бМ пантографного типа с параллелограммным подвижным основанием (рис. 12.2, в); штанговый токоприемник ОмГУПС с резино-
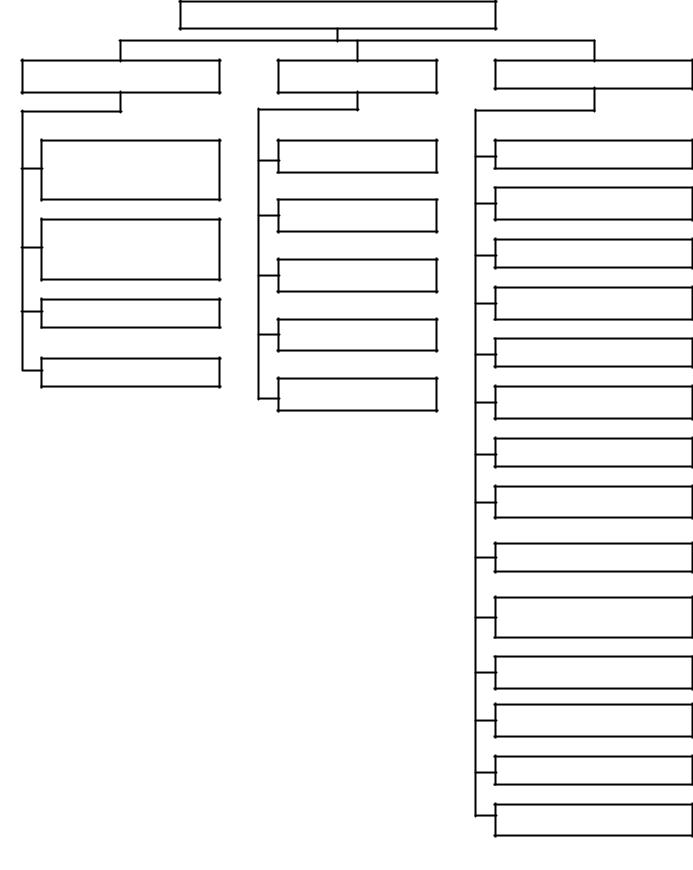
Рис. 12.1. Классификация элементов токоприемников
кордным упругим элементом в подъемно-опускающем механизме (рис. 12.2, г);
асимметричный полупантограф ВЭлНИИ и фирмы «Дорнье» О5А-350 с аналогич-
ным приводом (рис. 12.2, д). К основным узлам токоприемников относятся: кон-
тактные элементы (медные, металлокерамические, угольные); несущие конструкции полозов (рамные или сплошные) с рогами; каретки полозов; системы подвижных рам; подъемные упругие элементы; демпфирующее устройство; пневматический цилиндр с опускающей пружиной и рукавом; основание с изоляторами; управ-
ляющие элементы (клапаны); аэродинамическое устройство; нижняя система рам и авторегулятор ее высоты (см. рис. 12.2).
В настоящей главе рассматриваются характеристики узлов токоприемников,
влияющие на результаты расчетов их взаимодействия с контактными подвесками в установившемся и переходных режимах.
12.2. Приведенные массы системы подвижных рам и полозов токоприемников
Система подвижных рам предназначена для обеспечения надежного контакта полозов (лыж) токоприемника с контактными проводами при изменении высоты по-
следних в заданных пределах. Для магистральных железных дорог эта высота со-
ставляет 5550 – 6900 мм. Диапазон рабочих высот токоприемника (400 – 1900 мм)
определяет размеры его конструкции.
Основные схемы систем подвижных рам токоприемников могут быть клас-
сифицированы следующим образом: пантографы; полупантографы симметрич-
ные; полупантографы асимметричные; штанговые токоприемники и токоприем-
ники с подвижным основанием.
В России наиболее распространены и длительное время эксплуатируются ром-
бические пантографы типа ДЖ-5, П-1, П-3, Т-5. 10РР, 17РР, 25Ь5-1 и др. (рис.12.3,
а, д). В Японии для экономии места на крыше ЭПС применяют Х-образные (рис. 12.3, в) пантографы. Главные валы пантографа соединяют между собой тягой анти-
параллелограмма, обеспечивающей их синхронный поворот, и как следствие, верти-
кальное перемещение верхних шарниров.
Рис. 12.2. Схемы токоприемников ЭПС: магистральных (а. б): высокоскоростных специальных (в. г, д): 1 — контактные элементы: 2 — несущие конструкции полозов: 3 — каретки полозов; 4 — системы подвижных рам: 5 — подъемные упругие элементы; б — демпфирующее устройство; 7 — пневматический цилиндр с опускающей пружиной и рукавом; 8— основание с изоляторами; 9 — управляющие элементы; 10 — аэродинамическое устройство; II — нижняя система рам; 12 — авторегулятор высоты нижней системы рам
Конструкция симметричных полупантографов (рис. 12.3, г) дает возможность