

Задача к2.
Механизм состоит из: ступенчатых колес 1–3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес (рис. К2.0-К2.9, табл. К2). Радиусы ступеней колес равны соответственно: у колеса 1 –r1=2 см,R1=4 см, у колеса 2 –r2=6 см,R2=8 см, у колеса 3 –r3=12 см,R3=16 см. На ободьях колес расположены точкиА, В иС.
В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где 1(t) – закон вращения колеса 1,s4(t) – закон движения рейки 4,2(t) – закон изменения угловой скорости колеса 2, υ5(t) – закон изменения скорости груза 5 и т. д. (вездевыражено в радианах,s– в сантиметрах,t– в секундах). Положительное направление дляипротив хода часовой стрелки, дляs4,s5и υ4,υ5 – вниз.
Определить в момент времени t1=2 с, указанные в таблице в столбцах «Найти» скорости(υ – линейные,– угловые) и ускорения (а – линейные,ε– угловые) соответствующих точек или тел (υ5 – скорость груза 5 и т. д.).
|
|
|
| |
|
|
|
| |
|
|
|
| |
|
|
| ||











Пример К2.
Рейка
1, ступенчатое колесо 2 с радиусамиR2=6 см иr2=4
см и колесо 3 радиусаR3=8
см, скрепленное с валом радиусаr3=3
см, находятся в зацеплении; на вал
намотана нить с грузом 4 на конце
(рис. К2). Рейка движется по законуs1=3t3см.Определить:3,υ4, ε3, в
момент времениt=t1=3
с и ускорение aAточкиАобода колеса 3.
Решение.
1. Определить угловые скорости всех колес как функции времениt. Зная закон движения рейки 1, находим ее скорость:
 (1).
(1).
Так, как рейка и колесо 2 находятся в зацеплении, тоυ2=υ1 или2R2=υ1. Но колеса 2 и 3 тоже находятся в зацеплении, следовательно,υ2=υ3 или2r2=3R3. Из этих равенств находим:
 (2).
(2).
Тогда, для момента времени t1=3 с, получим3=6,75 с-1.
2.
Определить ε3. Учитывая второе из
равенств (2), .
Тогда приt1=3с:
.
Тогда приt1=3с:
ε3=4,5 с-2.
3. Определить υ4. Так как υ4=υB=3r3, то приt1=3 сυ4=20,25 см/с.
4. Определить аА. Для точкиА аА=аА+аАn, где численноаА=R3ε3, аАn=R332. Тогда, для момента времениt1=3 с:
аА=36
см/с2 , аАn=364,5
см/с2, см/с2.
см/с2.
Все скорости и ускорения точек, а также направления угловых скоростей показаны на рис. К2.
Ответ:3=6,75 с-1;υ4=20,25 см/с; ε3=4,5 с-2;аА=366,3 см/с2.
Задача к з.
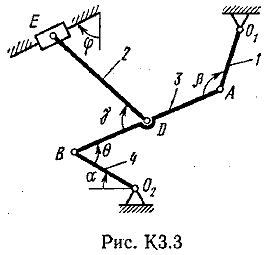
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползунаВ илиЕ (рис. К З.0К 3.7) или из стержней 1,2,3 и ползуновВ иЕ (рис. К 3.8, К 3.9), соединенных друг с другом и с неподвижными опорамиО1 О2шарнирами; точкаD находится в середине стержняАВ. Длины стержней равны соответственно:l1=0,4 м,l2=1,2 м,l3=1,4 м,l4=0,6 м. Положение механизма определяется углами, β, γ,, θ. Значения этих углов и других заданных величин, указаны в табл. К 3а (для рис. 0-4) или в табл. К 3б (для рис. 5-9); при этом в табл. К За1и4величины постоянные.
Определить величины, указанные в таблицах в столбцах «Найти».
Дуговые стрелки, на рисунках, показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, уголγна рис. 8 следует отложить отDB по ходу часовой стрелки, а на рис. 9против хода часовой стрелки и т. д.).
Построение чертежа начинать со стержня, направление которого определяется углом ; ползун с направляющими для большей наглядности изобразить так, как в примере К 3 (см. рис. К 3б). Заданные, угловую скорость и угловое ускорение, считать направленными против часовой стрелки, а заданные скорость υВи ускорениеаВот точкиВкb(на рис. 5-9).


|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

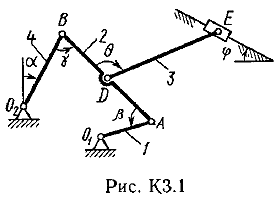







Пример КЗ.
Механизм
(рис. К 3а) состоит из стержней 1, 2, 3, 4 и
ползунаВ, соединенных друг с другом
и с неподвижными опорамиО1
иО2шарнирами.
Дано: =60°, β=150°, γ=90°,=30°, θ=30°,AD=DB, l1=0,4м,l2=1,2 м,l3=1,4 м, ώ1=2 с-1, έ=7 с-2(направления (ώ1иέ1против хода часовой стрелки).
Определить: υB, υE , ώ2,аB, έ3.
Решение.
1.
Строим положение механизма в соответствии
с заданными углами (рис. К 3б; на этом
рисунке изображаем все векторы скоростей).
2. Определяем υB. ТочкаВпринадлежит стержнюАВ. Чтобы найтиυB, надо знать скорость какой-нибудь другой точки этого стержня и направлениеυB. По данным задачи, учитывая направлениеώ1, можем определитьυА, численно:

Направление υВ найдем, учтя, что точкаВпринадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, знаяυА и направлениеυB, воспользуемся теоремой о проекциях скоростей двух точек тела (стержняАВ) на прямую, соединяющую эти точки (прямаяАВ). Сначала по этой теореме устанавливаем, в какую сторону направлен векторυB (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим:

3. Определяем υЕ. ТочкаЕпринадлежит стержнюDE. Следовательно, по аналогии с предыдущим, чтобы определить υЕ, надо сначала найти скорость точкиD, принадлежащей одновременно стержнюАВ. Для этого, зная υAи υB, строим мгновенный центр скоростей (МЦС) стержняАВ; это точкаС3, лежащая на пересечении перпендикуляров к υАи υB, восставленных из точекАиВ(к υА перпендикулярен стержень 1). По направлению вектора υAопределяем направление поворота стержняАВвокруг МЦСС3. Вектор υDперпендикулярен отрезкуC3D, соединяющему точкиDиС3, и направлен в сторону поворота. Величину υDнайдем из пропорции:

Чтобы вычислить С3DиС3В, заметим, что∆AС3Впрямоугольный, так как острые углы в нем равны 30° и 60°, и чтоС3В=АBsin30°=0,5АВ=BD. Тогда∆ВС3Dявляется равносторонним иС3В=C3D. В результате равенство дает:

Так как точка Е принадлежит одновременно стержнюО2Е, вращающемуся вокругО2, тоυЕ О2E. Тогда, расставляя из точекЕ иD перпендикуляры к скоростямυЕ и υD, построим МЦСС2 стержняDE. По направлению вектораυD определяем направление поворота стержняDE вокруг центраС2. ВекторυE направлен в сторону поворота этого стержня. Из рис. К 3б видно, чтоC2ED=C2DE=30°, откудаС2Е=C2D. Составив теперь пропорцию, найдем, что:

4. Определяем ώ2. Так, как МЦС стержня 2 известен (точкаС2) и
 ,
то
,
то

5.
Определяем аВ (рис. К
3в, на котором изображаем все векторы
ускорений). ТочкаВпринадлежит
стержнюАВ. Чтобы найтиаВ,
надо знать ускорение какой-нибудь
другой точки стержняАВ и траекторию
точкиВ. По данным задачи можем
определитьaА=aА+aАn,
где численно:


Вектор аАn направлен вдольАО1, ааАперпендикулярноАО1 изображаем эти векторы на чертеже (см. рис. К 3в). Так, как точкаВ одновременно принадлежит ползуну, то вектораB параллелен направляющим ползуна. Изображаем вектораB на чертеже, полагая, что он направлен в ту же сторону, что иυB.
Для определения аB воспользуемся равенством:

Изображаем на чертеже векторы аnВА (вдольВА отBкA) иаВА (в любую сторону перпендикулярноВА); численноаnB=ώ23l. Найдя ώ3с помощью построенного МЦСС3стержня 3, получим:

Таким образом, у величин, входящих в равенство (8), неизвестны только числовые значения аВ иаВА, их можно найти, спроектировав обе части равенства (8) на какие-нибудь две оси.
Чтобы определить аВ, спроектируем обе части равенства (8) на направлениеВА (осьх), перпендикулярное неизвестному векторуаВА. Тогда получим:

Подставив в равенство (10) числовые значения всех величин из (7) и (9), найдем, что:
aB=0,72 м/с2.
Так, как получилось aВ>0, то, следовательно, вектораВ направлен, как показано на рис. К Зв.
6. Определяем έ3. Чтобы найти έ3, сначала определимаВА. Для этого обе части равенства (8) спроектируем на направление, перпендикулярноеАВ (осьу). Тогда получим:

Подставив в равенство (12) числовые значения всех величин из (11) и (7), найдем, что аВА=3,58 м/с2. Знак указывает, что направлениеаВА противоположно показанному на рис. К 3в.
Теперь из равенства аВА=έ3l3получим:

Ответ:υB=0,46 м/с;υE=0,46 м/с; ώ2=0,67 с-1;аB=0,72 м/с2; έ3=2,56 с-2.
Задача К4
Прямоугольная пластина (рис. К 4.0К 4.4) или круглая пластина радиусаR=60 см (рис. К 4.5К 4.9) вращается вокруг неподвижной оси по закону=f1(t) заданному в табл. К 4. Положительное направление отсчета углапоказано на рисунках дуговой стрелкой. На рис. 0, 1, 2, 5, 6 ось вращения перпендикулярна плоскости пластины и проходит через точкуО(пластина вращается в своей плоскости); на рис. 3, 4, 7, 8, 9 ось вращенияОО1 лежит в плоскости пластины (пластина вращается в пространстве).
По пластине вдоль прямой BD (рис. 04) или по окружности радиусаR (рис. 59) движется точкаМ; закон ее относительного движения, т. е. зависимостьs=AM=f2(t) (sв сантиметрах,tв секундах), задан в таблице отдельно для рис. 0-4 и для рис. 5-9; там же даны размерыb иl. На рисунках точкаМ показана в положении, при которомs=AM>0 (приs<0 точкаМ находится по другую сторону от точкиА).
Найти абсолютную скорость и абсолютное ускорение точки М в момент времениt1=1с.

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|










Пример К4а.
Дано:R=0,5 м,=t2–0,5t3,s=πRcos(πt/3)
(– в радианах,s
– в метрах,t – в
секундах).
Определить:Vабсиаабсв момент времениt1=2 с.
Решение. Рассмотрим движение точкиВ как сложное, считая ее движение по дуге окружности относительным, а вращение пластины переносным движением. Тогда абсолютная скоростьVабси абсолютное ускорениеаабсточки найдутся по формулам:
 =
=
 +
+ ,
,
 =
=
 +
+
 +
+ ,
,
где,
в свою очередь,
 =
=
 +
+ ,
, =
= +
+ .
.
Рис. К4а
Определим все, входящие в равенства, величины. Рассмотрим каждое движение в отдельности.
1.
Относительное движение (мысленно
остановить вращение пластины вокруг
опоры О).Это движение происходит
по закону .
.
Положение точки В на дуге окружности в момент времениt1=2 с:
 .
.
Знак минус свидетельствует о том, что точка В в моментt1=2 с находится справа от точкиА. Изображаем ее на рис. К4а в этом положении (точкаB1).
Тогда
 .
.
Теперь находим числовые значения Vотн,аотн, аnотн:
 ;
;
 ,
,
где ρ – радиус кривизны относительной траектории, равный радиусу окружности R. Для моментаt1=2 с, учитывая, чтоR=0,5 м, получим:
 ;
;
 .
.
Знаки показывают, что вектор аотннаправлен в сторону положительного отсчета расстоянияs, а векторVотн-в противоположную сторону; вектораnотннаправлен к центруС окружности. Изображаем все эти векторы на рис. К4а.
2. Переносное движение (мысленно остановить движение точки по окружности).Это движение (вращение) происходит по закону=t2– 0,5t3. Найдем угловую скоростьи угловое ускорение ε переносного вращения приt1=2 с:

Знаки указывают, что в момент t1=2 с направленияи ε противоположны направлению положительного отсчета угла; отметим это на рис. К4а.
Для
определения Vпериапернаходим сначала
расстояниеh1=ОВ1
точкиB1от оси вращенияО. Из рисунка видно,
что .
Тогда в момент времениt1=2 с
получим:
.
Тогда в момент времениt1=2 с
получим:
 ;
;
 .
.
Изображаем на рис. К4а векторы Vпериaпер с учетом направленийи ε и вектораnпер(направлен к оси вращения).
3. Ускорение Кориолиса. Модуль ускорения Кориолиса определяем по формуле:
 ,
,
где – угол между векторомVотни осью вращения (вектором). В нашем случае этот угол равен 90°, так как ось вращения перпендикулярна плоскости пластины, в которой расположен векторVотн. Тогда в момент времениt1=2 с, учитывая, что в этот момент |Vотн|=1,42 м/с и ||=2 с-1, получим
акор=5,68 м/с2.
Направление акор найдем по правилу Н. Е. Жуковского: так как векторυотн лежит в плоскости, перпендикулярной оси вращения, то повернем его на 900в направлении ώ, т. е. по ходу часовой стрелки. Изображаемакорна рис. К4а. [Иначе направлениеакорможно найти, учтя, чтоакор=2(ώ*υотн)].
Таким образом, значения всех входящих в правые части равенств (1) векторов найдены и для определения υабсиаабс остается только сложить эти векторы. Произведем это сложение аналитически.
4. Определение υа6с. Проведем координатные осиB1xy (см. рис. К4а) и спроектируем почленно обе части равенства
υабс=υотн+υпер на эти оси. Получим для момента времениt1=2 с;


После этого находим

Учитывая, что в данном случае угол между υотниυпер равен 45°, значениеυабс можно еще определить по формуле

5. Определение аабс. По теореме о сложении ускорений

Для определения аабсспроектируем обе части равенства (7) на проведенные осиB1xy. Получим


Подставив сюда значения, которые все величины имеют в момент времени t1=2 с, найдем, что в этот момент
аабсх=9,74 м/с2;аавсу=7,15 м/с2
Тогда

Ответ: υа6с=3,95 м/с,аабс=12,08 м/с2.
Пример К4б.
Треугольная
пластина ADEвращается
вокруг осиz по
закону=f1(t)
(положительное направление отсчета
углапоказано на
рис. К4б дуговой стрелкой). По гипотенузеADдвижется точка В по
законуs= АВ =f2(t);
положительное направление отсчетаs
– от А кD.
Дано: = 0,1t3–2,2t,s= АВ = 2 + 15t– 3t2; (– в радианах,s– в сантиметрах,t– в секундах). Определить:Vабсиаабсв момент времениt1= 2 с.
Рис. К4б
Решение.Рассмотрим движение точки В, как сложное,
считая ее движение по прямой AD
относительным, а вращение пластины –
переносным. Тогда абсолютная скорость и абсолютное ускорение
и абсолютное ускорение найдутся по формулам:
найдутся по формулам:
 =
=
 +
+ ,
,
 =
= +
+
 +
+ ,
,
где,
в свою очередь,
 =
=
 +
+ .
.
Определим все входящие в равенство величины.
1. Относительное движение это движение прямолинейное и происходит по закону
s = AB = 2 + 15t 3t2,
поэтому


В момент времени t1= 2 с имеем
s1=AB1= 20cм,Vотн= 3 см/с,аотн=6 см/с2
Знаки
показывают, что вектор
 направлен в сторону положительного
отсчета расстоянияs, а вектор
направлен в сторону положительного
отсчета расстоянияs, а вектор – в противоположную сторону. Изображаем
эти векторы на рис. К4б.
– в противоположную сторону. Изображаем
эти векторы на рис. К4б.
2. Переносное движение.Это движение (вращение) происходит по закону
= 0,1t32,2t.
Найдем угловую скорость и угловое ускорениепереносного вращения:
=
 = 0,3t22,2;=
= 0,3t22,2;= = 0,6tи приt1= 2 с,
= 0,6tи приt1= 2 с,
= 1c1,= 1,2c2.
Знаки указывают, что в момент t1= 2 с направлениесовпадает с направлением положительного отсчета угла, а направлениеему противоположно; отметим это на рис. К3б соответствующими дуговыми стрелками.
Из рисунка находим расстояние h1точкиВ1от оси вращенияz:
h1 =AB1sin30° = 10 см. Тогда в моментt1= 2 с, учитывая равенства (68), получаем:
Vпер= ||h1= 10cм/с,
 =
||h1
= 12 см/с2,
=
||h1
= 12 см/с2,
 =2h1
= 10 см/с2.
=2h1
= 10 см/с2.
Изобразим
на рис. К4б векторы
 и
и (с учетом знакови) и
(с учетом знакови) и ;
направлены векторы
;
направлены векторы и
и перпендикулярно плоскости ADE, а вектор
перпендикулярно плоскости ADE, а вектор – по линии В1С к оси вращения.
– по линии В1С к оси вращения.
3.
Кориолисово ускорение.Так как угол
между вектором и осью вращения (вектором
и осью вращения (вектором )
равен 30°, то численно в момент времениt1 = 2 с
)
равен 30°, то численно в момент времениt1 = 2 с
акор= 2|Vотн|||sin30° = 3см/с2.
Направление
 найдем по правилу Н. Е. Жуковского. Для
этого вектор
найдем по правилу Н. Е. Жуковского. Для
этого вектор спроецируем на плоскость, перпендикулярную
оси вращения (проекция направлена
противоположно вектору
спроецируем на плоскость, перпендикулярную
оси вращения (проекция направлена
противоположно вектору )
и затем эту проекцию повернем на 90° в
сторону, т. е. по
ходу часовой стрелки; получим направление
вектора
)
и затем эту проекцию повернем на 90° в
сторону, т. е. по
ходу часовой стрелки; получим направление
вектора .
Он направлен перпендикулярно плоскости
пластины так же, как вектор
.
Он направлен перпендикулярно плоскости
пластины так же, как вектор (см. рис. К3б).
(см. рис. К3б).
4.
ОпределениеVабс.
Так как =
= +
+ ,
а векторы
,
а векторы и
и взаимно перпендикулярны, то
взаимно перпендикулярны, то ;
в момент времениt1= 2 сVабс=
10,44 см/с.
;
в момент времениt1= 2 сVабс=
10,44 см/с.
5. Определениеаабс. По теореме о сложении ускорений
 =
=
 +
+
 +
+ +
+ .
.
Для
определения аабс
проведем координатные оси В1хуz1
и вычислим проекции
 на эти оси. Учтем при этом, что векторы
на эти оси. Учтем при этом, что векторы и
и лежат на осих1,
а векторы
лежат на осих1,
а векторы
 и
и расположены в плоскостиВ1хуz1,
т. е. в плоскости пластины. Тогда, проецируя
обе части равенства (71) на оси В1хуz1
и учтя одновременно равенства (67), (69),
(70), получаем для момента времени t1
= 2 с:
расположены в плоскостиВ1хуz1,
т. е. в плоскости пластины. Тогда, проецируя
обе части равенства (71) на оси В1хуz1
и учтя одновременно равенства (67), (69),
(70), получаем для момента времени t1
= 2 с:
аабс
х= | |
–акор= 9 см/с2,
|
–акор= 9 см/с2,
аабс
у= + |аотн|sin30 ° = 13 см/с2,
+ |аотн|sin30 ° = 13 см/с2,
аабс z= |аотн|cos30 ° = 5,20 см/с2.
Отсюда находим значение аабс:
 см/с2.
см/с2.
Ответ: Vабс= 10,44 см/с,аабс= 16,64 см/с2.