28. Потенциальная точность измерения дальности, скорости и угла
Минимальная дисперсия шумовой ошибки определяет потенциальную точность измерения координат.
Среднеквадратичная ошибка измерения дальности:
 , гдеFC– эффективная ширина спектра сигнала.
, гдеFC– эффективная ширина спектра сигнала.
Среднеквадратичная ошибка измерения радиальной скорости:
 где ТC– длительность
сигнала (пачки когерентных импульсов).
где ТC– длительность
сигнала (пачки когерентных импульсов).
СКО измерения угла:
 где θА–ширина диаграммы
направленности антенны;
где θА–ширина диаграммы
направленности антенны; - коэффициент
- коэффициент
Шумовые ошибки измерения координат тем меньше, чем больше отношение сигнал/шум.
Для уменьшения ошибки дальности – расширить спектр сигнала.
Для уменьшения ошибки измерения скорости – увеличить длительность сигнала.
Для увеличения СКО угловой координаты – сужать Д.Н. антенны.
29. Реализация измерителей в многоканальном и следящем виде
Многоканальный фильтровой измеритель скорости:
Обозначения: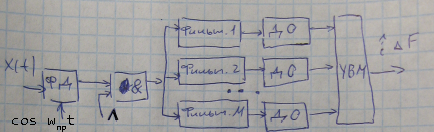
ФД – фазовый детектор;
ДО – детектор огибающей;
УВМ – устройство выбора максимума.
Расчёты для его реализации.
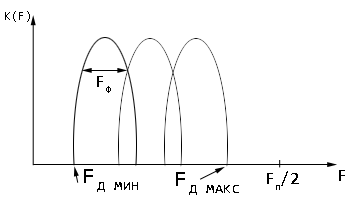
Требуемое число фильтров определяется диапазоном доплеровских частот и полосой одного фильтра:

Полоса одного
фильтра:

Разная частота
фильтров
 или
или .
.
Число фильтров будет вдвое больше, что уменьшает вероятность пропуска сигнала из-за "провалов" на АЧХ соседних фильтров
Многоканальный
измеритель при М>20 реализуется в виде
вычислителя дискретного преобразования
Фурье (ДПФ). Практически реализуется в
виде быстрого преобразования Фурье
(БПФ). При размере выборки Nчерез ДПФ запишется так:
ДПФ запишется так:
 , гдеan
– весовые коэффициенты.
, гдеan
– весовые коэффициенты.
Каждому
коэффициенту
 соответствует
полоса эквивалентного фильтра
соответствует
полоса эквивалентного фильтра
Следящий измеритель скорости
Устройство должно оценивать доплеровский сдвиг и осуществлять слежение за изменением Fд(t).
Схема реализации устройства:
СМ – смеситель;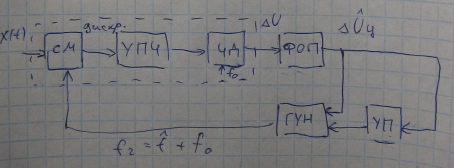
ЧД – частотный детектор;
ФОП – фильтр оценки доплеровского сдвига (ФНЧ);
ГУН – генератор управляемый напряжением;
УП – устройство поиска;
(стр. 116 Сперанский)
30. Импульсный метод измерения дальности. Цифровой и визуальный съем дальности
Дальность в
радиолокации измеряется путем прямой
или косвенной оценки задержки радиосигнала
от цели. При импульсном методе производится
прямое измерение задержки сигнала
 ,
отраженного от цели относительно момента
излучения зондирующего сигнала радиоволн.
С учетом скорости распространения
радиоволн дальность равна
,
отраженного от цели относительно момента
излучения зондирующего сигнала радиоволн.
С учетом скорости распространения
радиоволн дальность равна .
.
Визуальный
– по экрану электронно-лучевой трубки,
путем подсчета импульсов меток между
пусковым и импульсом цели ,
гдеL– оценка числа
счётных импульсов.
,
гдеL– оценка числа
счётных импульсов.
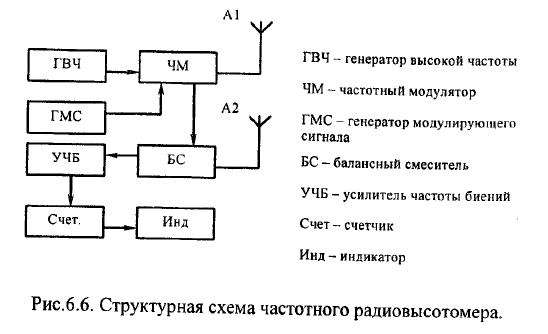
31. Частотный метод измерения дальности. Радиовысотомер малых высот
При этом методе применяется непрерывный зондирующий сигнал с линейной или синусоидальной частотной модуляцией.
Максимальное
отклонение частоты называется девиацией
частоты. модуляция применяется
периодическая с периодом модуляции
 .
Частота зондирующего сигнала в момент
времениtравна:
.
Частота зондирующего сигнала в момент
времениtравна:
 ,
где
,
где - частота девиации.
- частота девиации.
За время
распространения сигнала за счёт частотной
модуляции частота опорного сигнала
меняется:
Разность
частот называется частотой биения:
 .
.
Измерив частоту биений, можно оценить дальность до цели:

Радиовысотомер: